本教程基于韦东山百问网出的 DShanMCU-RA6M5开发板 进行编写,需要的同学可以在这里获取: https://item.taobao.com/item.htm?id=728461040949
配套资料获取:https://renesas-docs.100ask.net
瑞萨MCU零基础入门系列教程汇总: https://blog.csdn.net/qq_35181236/article/details/132779862
第1章 单片机程序的设计模式
本章目标
- 理解裸机程序设计模式
- 了解多任务系统中程序设计的不同
1.1 裸机程序设计模式
裸机程序的设计模式可以分为:轮询、前后台、定时器驱动、基于状态机。前面三种方法都无法解决一个问题:假设有 A、B 两个都很耗时的函数,无法降低它们相互之间的影响。第 4 种方法可以解决这个问题,但是实践起来有难度。
假设一位职场妈妈需要同时解决 2 个问题:给小孩喂饭、回复工作信息,场景如图所示,
后面将会演示各类模式下如何写程序:

1.1.1 轮询模式
示例代码如下:
// 经典单片机程序: 轮询
void main()
{
while (1)
{
喂一口饭();
回一个信息();
}
}
在 main 函数中是一个 while 循环,里面依次调用 2 个函数,这两个函数相互之间有影响:如果“喂一口饭”太花时间,就会导致迟迟无法“回一个信息”;如果“回一个信息”太花时间,就会导致迟迟无法“喂下一口饭”。
使用轮询模式编写程序看起来很简单,但是要求 while 循环里调用到的函数要执行得非常快,在复杂场景里反而增加了编程难度。
1.1.2 前后台
所谓“前后台”就是使用中断程序。假设收到同事发来的信息时,电脑会发出“滴”的一声,这时候妈妈才需要去回复信息。示例程序如下:
// 前后台程序
void main()
{
while (1)
{
// 后台程序
喂一口饭();
}
}
// 前台程序
void 滴_中断()
{
回一个信息();
}
- main 函数里 while 循环里的代码是后台程序,平时都是 while 循环在运行;
- 当同事发来信息,电脑发出“滴”的一声,触发了中断。妈妈暂停喂饭,去执行“滴_中断”给同事回复信息;
在这个场景里,给同事回复信息非常及时:即使正在喂饭也会暂停下来去回复信息。“喂一口饭”无法影响到“回一个信息”。但是,如果“回一个信息”太花时间,就会导致 “喂一口饭”迟迟无法执行。
继续改进,假设小孩吞下饭菜后会发出“啊”的一声,妈妈听到后才会喂下一口饭。喂饭、回复信息都是使用中断函数来处理。示例程序如下:
// 前后台程序
void main()
{
while (1)
{
// 后台程序
}
}
// 前台程序
void 滴_中断()
{
回一个信息();
}
// 前台程序
void 啊_中断()
{
喂一口饭();
}
main 函数中的 while 循环是空的,程序的运行靠中断来驱使。如果电脑声音“滴”、小孩声音“啊”不会同时、相近发出,那么“回一个信息”、“喂一口饭”相互之间没有影响。在不能满足这个前提的情况下,比如“滴”、“啊”同时响起,先“回一个信息”时就会耽误“喂一口饭”,这种场景下程序遭遇到了轮询模式的缺点:函数相互之间有影响。
1.1.3 定时器驱动
定时器驱动模式,是前后台模式的一种,可以按照不用的频率执行各种函数。比如需要每 2 分钟给小孩喂一口饭,需要每 5 分钟给同事回复信息。那么就可以启动一个定时器,让它每 1 分钟产生一次中断,让中断函数在合适的时间调用对应函数。示例代码如下:
// 前后台程序: 定时器驱动
void main()
{
while (1)
{
// 后台程序
}
}
// 前台程序: 每 1 分钟触发一次中断
void 定时器_中断()
{
static int cnt = 0;
cnt++;
if (cnt % 2 == 0)
{
喂一口饭();
}
else if (cnt % 5 == 0)
{
回一个信息();
}
}
main 函数中的 while 循环是空的,程序的运行靠定时器中断来驱使。
- 定时器中断每 1 分钟发生一次,在中断函数里让 cnt 变量累加(代码第 14 行)。
- 第 15 行:进行求模运算,如果对 2 取模为 0,就“喂一口饭”。这相当于每发生 2 次中断就“喂一口饭”。
- 第 19 行:进行求模运算,如果对 5 取模为 0,就“回一个信息”。这相当于每发生 5 次
中断就“回一个信息”。
这种模式适合调用周期性的函数,并且每一个函数执行的时间不能超过一个定时器周期。如果“喂一口饭”很花时间,比如长达 10 分钟,那么就会耽误“回一个信息”;反过来也是一样的,如果“回一个信息”很花时间也会影响到“喂一口饭”;这种场景下程序遭遇到了轮询模式的缺点:函数相互之间有影响。
1.1.4 基于状态机
当“喂一口饭”、“回一个信息”都需要花很长的时间,无论使用前面的哪种设计模式,都会退化到轮询模式的缺点:函数相互之间有影响。可以使用状态机来解决这个缺点,示例代码如下:
// 状态机
void main()
{
while (1)
{
喂一口饭();
回一个信息();
}
}
在 main 函数里,还是使用轮询模式依次调用 2 个函数。
关键在于这 2 个函数的内部实现:使用状态机,每次只执行一个状态的代码,减少每次执行的时间,代码如下:
void 喂一口饭(void)
{
static int state = 0;
switch (state)
{
case 0:
{
/* 舀饭 */
/* 进入下一个状态 */
state++;
break;
}
case 1:
{
/* 喂饭 */
/* 进入下一个状态 */
state++;
break;
}
case 2:
{
/* 舀菜 */
/* 进入下一个状态 */
state++;
break;
}
case 2:
{
/* 喂菜 */
/* 恢复到初始状态 */
state = 0;
break;
}
}
}
void 回一个信息(void)
{
static int state = 0;
switch (state)
{
case 0:
{
/* 查看信息 */
/* 进入下一个状态 */
state++;
break;
}
case 1:
{
/* 打字 */
/* 进入下一个状态 */
state++;
break;
}
case 2:
{
/* 发送 */
/* 恢复到初始状态 */
state = 0;
break;
}
}
}
以“喂一口饭”为例,函数内部拆分为 4 个状态:舀饭、喂饭、舀菜、喂菜。每次执行“喂一口饭”函数时,都只会执行其中的某一状态对应的代码。以前执行一次“喂一口饭”函数可能需要 4 秒钟,现在可能只需要 1 秒钟,就降低了对后面“回一个信息”的影响。
同样的,“回一个信息”函数内部也被拆分为 3 个状态:查看信息、打字、发送。每次执行这个函数时,都只是执行其中一小部分代码,降低了对“喂一口饭”的影响。
使用状态机模式,可以解决裸机程序的难题:假设有 A、B 两个都很耗时的函数,怎样降低它们相互之间的影响。但是很多场景里,函数 A、B 并不容易拆分为多个状态,并且这些状态执行的时间并不好控制。所以这并不是最优的解决方法,需要使用多任务系统。
1.2 多任务系统
1.2.1 多任务模式
对于裸机程序,无论使用哪种模式进行精心的设计,在最差的情况下都无法解决这个问题:假设有 A、B 两个都很耗时的函数,无法降低它们相互之间的影响。使用状态机模式时,如果函数拆分得不好,也会导致这个问题。本质原因是:函数是轮流执行的。假设“喂一口饭”需要 t1~t5 这 5 段时间,“回一个信息需要”ta~te 这 5 段时间,轮流执行时:先执行完 t1~t5,再执行 ta~te,如下图所示:
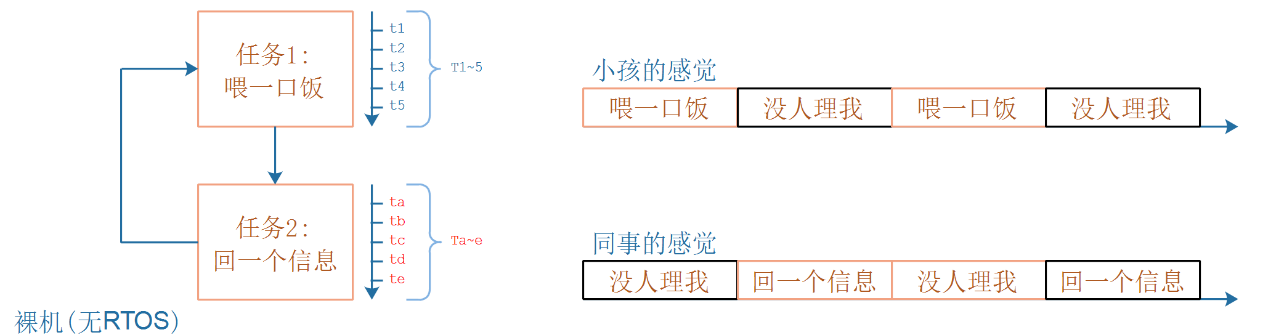
对于职场妈妈,她怎么解决这个问题呢?她是一个眼明手快的人,可以一心多用,她这
样做:
- 左手拿勺子,给小孩喂饭
- 右手敲键盘,回复同事
- 两不耽误,小孩“以为”妈妈在专心喂饭,同事“以为”她在专心聊天
- 但是脑子只有一个啊,虽然说“一心多用”,但是谁能同时思考两件事?
- 只是她反应快,上一秒钟在考虑夹哪个菜给小孩,下一秒钟考虑给同事回复什么信息
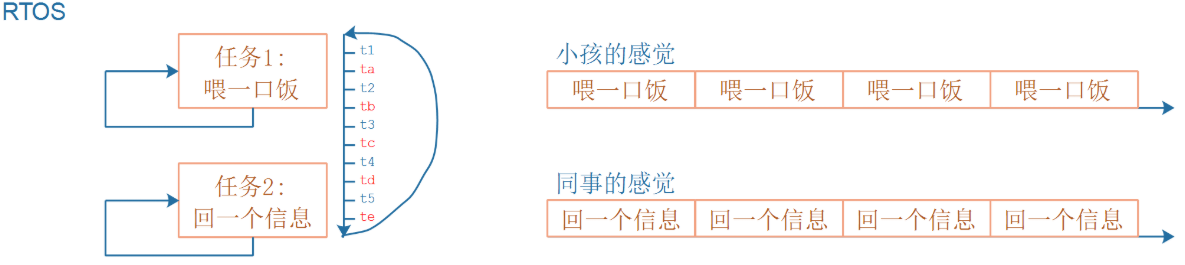
- 本质是:交叉执行,t1~t5 和 ta~te 交叉执行,如下图所示:
基于多任务系统编写程序时,示例代码如下:
// RTOS 程序
喂饭任务()
{
while (1)
{
喂一口饭();
}
}
回信息任务()
{
while (1)
{
回一个信息();
}
}
void main()
{
// 创建 2 个任务
create_task(喂饭任务);
create_task(回信息任务);
// 启动调度器
start_scheduler();
}
- 第 21、22 行,创建 2 个任务;
- 第 25 行,启动调度器;
- 之后,这 2 个任务就会交叉执行了;
基于多任务系统编写程序时,反而更简单了:
- 上面第 2~8 行是“喂饭任务”的代码;
- 第 10~16 行是“回信息任务”的代码,编写它们时甚至都不需要考虑它和其他函数的相互影响。就好像有 2 个单板:一个只运行“喂饭任务”这个函数、另一个只运行“回信息任务”这个函数。
多任务系统会依次给这些任务分配时间:你执行一会,我执行一会,如此循环。只要切换的间隔足够短,用户会“感觉这些任务在同时运行”。如下图所示:

1.2.2 互斥操作
多任务系统中,多个任务可能会“同时”访问某些资源,需要增加保护措施以防止混乱。比如任务 A、B 都要使用串口,能否使用一个全局变量让它们独占地、互斥地使用串口?示例代码如下:
// RTOS 程序
int g_canuse = 1;
void uart_print(char *str)
{
if (g_canuse)
{
g_canuse = 0;
printf(str);
g_canuse = 1;
}
}
task_A()
{
while (1)
{
uart_print("0123456789\n");
}
}
task_B()
{
while (1)
{
uart_print("abcdefghij");
}
}
void main()
{
// 创建 2 个任务
create_task(task_A);
create_task(task_B);
// 启动调度器
start_scheduler();
}
程序的意图是:task_A 打印“0123456789”,task_B 打印“abcdefghij”。在 task_A 或task_B 打印的过程中,另一个任务不能打印,以避免数字、字母混杂在一起,比如避免打印这样的字符:“012abc”。
第 6 行使用全局变量 g_canuse 实现互斥打印,它等于 1 时表示“可以打印”。在进行实际打印之前,先把 g_canuse 设置为 0,目的是防止别的任务也来打印。
这个程序大部分时间是没问题的,但是只要它运行的时间足够长,就会出现数字、字母混杂的情况。下图把 uart_print 函数标记为①~④个步骤:
void uart_print(char *str)
{
if (g_canuse) ①
{
g_canuse = 0; ②
printf(str); ③
g_canuse = 1; ④
}
}
如果 task_A 执行完①,进入 if 语句里面执行②之前被切换为 task_B:在这一瞬间,g_canuse 还是 1。
task_B 执行①时也会成功进入 if 语句,假设它执行到③,在 printf 打印完部分字符比如“abc”后又再次被切换为 task_A。
task_A 继续从上次被暂停的地方继续执行,即从②那里继续执行,成功打印出“0123456789”。这时在串口上可以看到打印的结果为:“abc0123456789”。
是不是“①判断”、“②清零”间隔太远了,uart_print 函数改进成如下的代码呢?
void uart_print(char *str)
{
g_canuse--; ① 减一
if (g_canuse == 0) ② 判断
{
printf(str); ③ 打印
}
g_canuse++; ④ 加一
}
即使改进为上述代码,仍然可能产生两个任务同时使用串口的情况。因为“①减一”这个操作会分为 3 个步骤:a.从内存读取变量的值放入寄存器里,b.修改寄存器的值让它减一,c.把寄存器的值写到内存上的变量上去。
如果task_A执行完步骤a、b,还没来得及把新值写到内存的变量里,就被切换为task_B:在这一瞬间,g_canuse 还是 1。
task_B 执行①②时也会成功进入 if 语句,假设它执行到③,在 printf 打印完部分字符比如“abc”后又再次被切换为 task_A。
task_A 继续从上次被暂停的地方继续执行,即从步骤 c 那里继续执行,成功打印出“0123456789”。这时在串口上可以看到打印的结果为:“abc0123456789”。
从上面的例子可以看到,基于多任务系统编写程序时,访问公用的资源的时候要考虑“互斥操作”。任何一种多任务系统都会提供相应的函数。
1.2.3 同步操作
如果任务之间有依赖关系,比如任务 A 执行了某个操作之后,需要任务 B 进行后续的处理。如果代码如下编写的话,任务 B 大部分时间做的都是无用功。
// RTOS 程序
int flag = 0;
void task_A()
{
while (1)
{
// 做某些复杂的事情
// 完成后把 flag 设置为 1
flag = 1;
}
}
void task_B()
{
while (1)
{
if (flag)
{
// 做后续的操作
}
}
}
void main()
{
// 创建 2 个任务
create_task(task_A);
create_task(task_B);
// 启动调度器
start_scheduler();
}
上述代码中,在任务 A 没有设置 flag 为 1 之前,任务 B 的代码都只是去判断 flag。而任务 A、B 的函数是依次轮流运行的,假设系统运行了 100 秒,其中任务 A 总共运行了 50秒,任务 B 总共运行了 50 秒,任务 A 在努力处理复杂的运算,任务 B 仅仅是浪费 CPU 资源。
如果可以让任务 B 阻塞,即让任务 B 不参与调度,那么任务 A 就可以独占 CPU 资源加快处理复杂的事情。当任务 A 处理完事情后,再唤醒任务 B。示例代码如下:
//RTOS 程序
void task_A()
{
while (1)
{
// 做某些复杂的事情
// 释放信号量,会唤醒任务 B;
}
}
void task_B()
{
while (1)
{
// 等待信号量, 会让任务 B 阻塞
// 做后续的操作
}
}
void main()
{
// 创建 2 个任务
create_task(task_A);
create_task(task_B);
// 启动调度器
start_scheduler();
}
- 第 15 行:任务 B 运行时,等待信号量,不成功时就会阻塞,不在参与任务调度。
- 第 7 行: 任务 A 处理完复杂的事情后,释放信号量会唤醒任务 B。
- 第 16 行:任务 B 被唤醒后,从这里继续运行。
在这个过程中,任务 A 处理复杂事情的时候可以独占 CPU 资源,加快处理速度。