目录
- 1. kd树的意义
- 2. kd树的使用
参考博客《欧式聚类(KD-Tree)详解,保姆级教程》和《(三分钟)学会kd-tree 激光SLAM点云搜索常见》
1. kd树的意义
- kd树是什么?
kd树是一种空间划分的数据结构,对于多个维度的数据,按照某种规则选定某个维度,在该维度下进行排序,选择中间的数据作为划分节点,然后分别对划分节点左边和右边的数据进行上面的划分步骤。
- 为什么需要kd树?
三维点云的数据量较大,使用kd树进行搜索可以减少时间,可以确保点云的关联点寻找和匹配处于实时状态。总而言之,就是利用kd树,可以实现点云数据的快速搜索。
2. kd树的使用
使用kd树一般有两个任务,分别是k近邻搜索和半径内搜索。代码实现主要参考双愚的代码
#include <iostream>
#include <pcl/kdtree/kdtree_flann.h>
#include <pcl/point_cloud.h>
#include <vector>
#include <ctime>
int main(int argc, char** argv)
{
srand(time(NULL));
//第一步:生成点云
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
cloud->width = 100;
cloud->height = 1;
cloud->points.resize(cloud->width * cloud->height);
for (size_t i=0; i < cloud->points.size(); i++)
{
cloud->points[i].x = 1024.0f * rand() / (RAND_MAX + 1.0f);
cloud->points[i].y = 1024.0f * rand() / (RAND_MAX + 1.0f);
cloud->points[i].z = 1024.0f * rand() / (RAND_MAX + 1.0f);
}
//第二步:生成搜索点
pcl::PointXYZ searchPoint;
searchPoint.x = 1024.0f * rand() / (RAND_MAX + 1.0f);
searchPoint.y = 1024.0f * rand() / (RAND_MAX + 1.0f);
searchPoint.z = 1024.0f * rand() / (RAND_MAX + 1.0f);
//第三步:定义kd树
pcl::KdTreeFLANN<pcl::PointXYZ> kdtree;
kdtree.setInputCloud(cloud); //将点云cloud作为输入
//第四步:采用kdtree.nearestKSearch方法,输出点searchPoint的最近10个点云
int K = 10;
std::cout << "K nearest neighbor search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z
<< ") with K=" << K << std::endl;
std::vector<int> pointIdxNKNSearch(K);
std::vector<float> pointNKNSquaredDistance(K);
if (kdtree.nearestKSearch(searchPoint, K, pointIdxNKNSearch, pointNKNSquaredDistance) > 0)
{
for (size_t i=0; i<pointIdxNKNSearch.size(); ++i)
{
std::cout << " " << cloud->points[ pointIdxNKNSearch[i] ].x
<< " " << cloud->points[ pointIdxNKNSearch[i] ].y
<< " " << cloud->points[ pointIdxNKNSearch[i] ].z
<< " (squared distance: " << pointNKNSquaredDistance[i] << ")" << std::endl;
}
}
//第五步:采用kdtree.radiusSearch方法,输出点searchPoint的给定半径距离内的其他点
float radius = 256.0f * rand() / (RAND_MAX + 1.0f);
std::cout << "Neighbors within radius search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z
<< ") with radius=" << radius << std::endl;
std::vector<int> pointIdxRadiusSearch;
std::vector<float> pointRadiusSquaredDistance;
if (kdtree.radiusSearch(searchPoint, radius, pointIdxRadiusSearch, pointRadiusSquaredDistance) > 0)
{
for (size_t i = 0; i < pointIdxRadiusSearch.size (); ++i)
{
std::cout << " " << cloud->points[ pointIdxRadiusSearch[i] ].x
<< " " << cloud->points[ pointIdxRadiusSearch[i] ].y
<< " " << cloud->points[ pointIdxRadiusSearch[i] ].z
<< " (squared distance: " << pointRadiusSquaredDistance[i] << ")" << std::endl;
}
}
return 0;
}
- CMakeLists.txt
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
project(kdtree_search)
find_package(PCL)
add_executable(kdtree_search kdtree_search.cpp)
target_link_libraries(kdtree_search ${PCL_LIBRARIES})
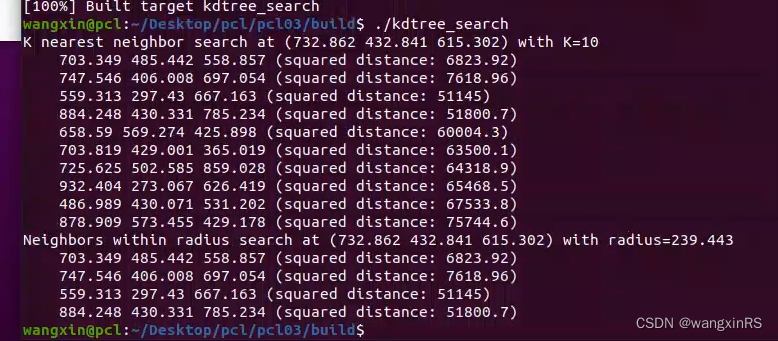
- 运行结果