文章目录
- 功能
- 背景
- 代码
- 效果
功能
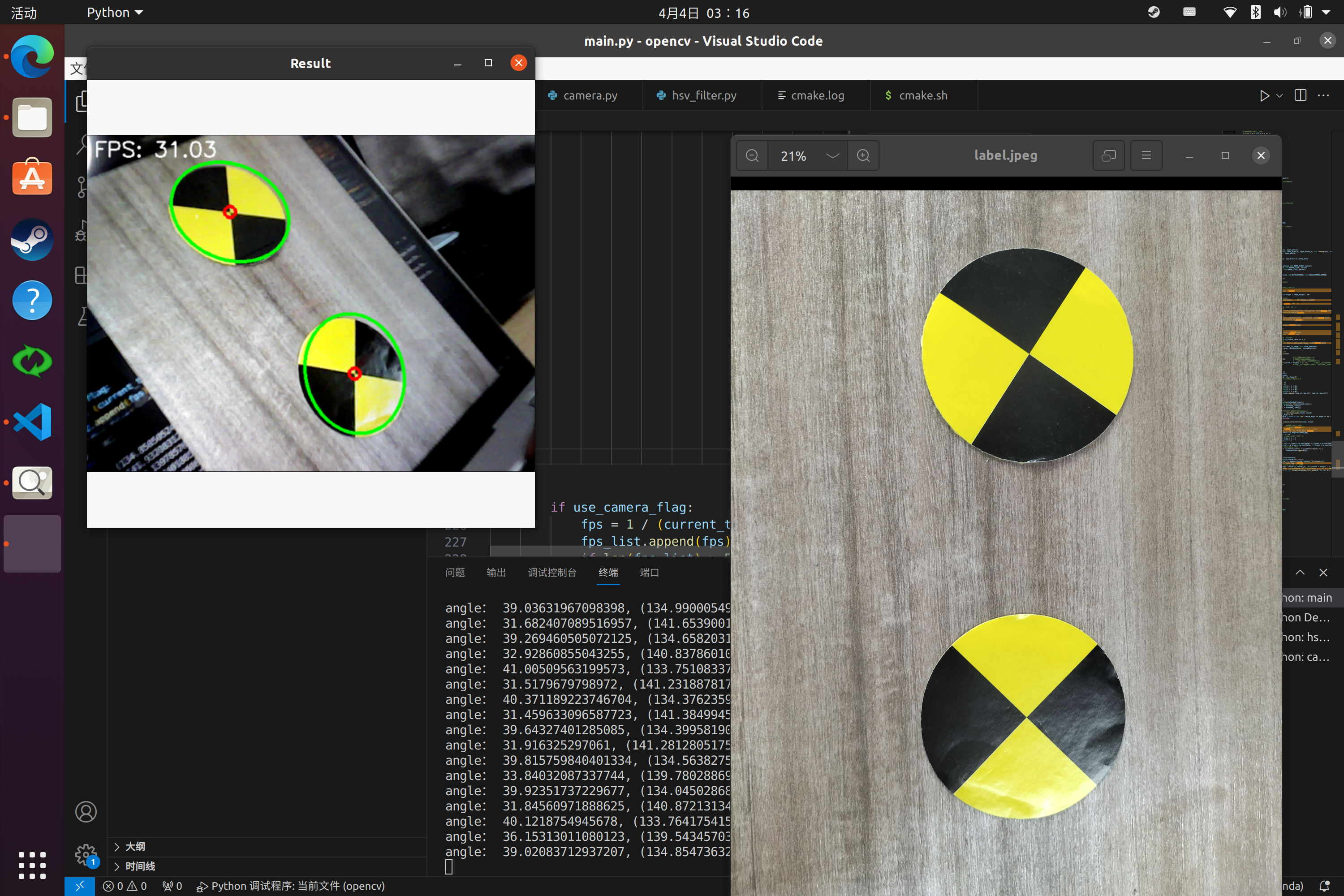
实现对形似宝马标的黄黑四象限光学识别标定位
背景
大学同学遇到了这个场景,琢磨了下,以备不时之需。
代码
所用opencv版本:4.12
numpy==2.2.4
scikit_learn==1.6.1
import time
import cv2
import numpy as np
import math
from sklearn.cluster import KMeans
def calculate_tilt_angle(a, b):
# 确保 a >= b
if a < b:
a, b = b, a
# 计算倾斜角度(弧度)
theta_rad = math.acos(b / a)
# 转为角度
theta_deg = math.degrees(theta_rad)
return theta_deg
def compute_intersection(line1, line2):
"""计算两条直线的交点"""
(x1, y1), (x2, y2) = line1
(x3, y3), (x4, y4) = line2
# 计算分母
den = (x1 - x2) * (y3 - y4) - (y1 - y2) * (x3 - x4)
if den == 0: # 直线平行
return None
# 计算交点坐标
t = ((x1 - x3) * (y3 - y4) - (y1 - y3) * (x3 - x4)) / den
u = -((x1 - x2) * (y1 - y3) - (y1 - y2) * (x1 - x3)) / den
# 判断交点是否在线段内
if 0 <= t <= 1 and 0 <= u <= 1:
x = x1 + t * (x2 - x1)
y = y1 + t * (y2 - y1)
return (int(x), int(y))
else:
return None
def calculate_angle(line1, line2):
"""计算两条线段之间的夹角(度数)"""
# 提取线段端点坐标
(x1, y1), (x2, y2) = line1
(x3, y3), (x4, y4) = line2
# 计算方向向量
vec1 = (x2 - x1, y2 - y1)
vec2 = (x4 - x3, y4 - y3)
# 计算向量模长
mod1 = np.sqrt(vec1[0]**2 + vec1[1]**2)
mod2 = np.sqrt(vec2[0]**2 + vec2[1]**2)
if mod1 == 0 or mod2 == 0:
return None # 无效向量(线段长度为0)
# 计算点积和夹角余弦
dot_product = vec1[0] * vec2[0] + vec1[1] * vec2[1]
cos_theta = dot_product / (mod1 * mod2)
cos_theta = np.clip(cos_theta, -1.0, 1.0) # 处理浮点误差
# 计算角度(0°~180°)
angle = np.degrees(np.arccos(cos_theta))
return angle
if __name__ == '__main__':
use_camera_flag = 1
fps_list = []
prev_time = 0
if use_camera_flag:
cap = cv2.VideoCapture(2) # 自己修改为摄像头对应ID
while True:
if use_camera_flag:
current_time = time.time()
ret, image = cap.read()
else:
# 读取图像
image = cv2.imread("label.jpeg")
# image = cv2.imread("label0.png")
# image = cv2.imread("label1.png")
# image = cv2.imread("label2.jpeg")
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
# 定义黄色和黑色的HSV阈值范围(需根据实际图像调整)
lower_yellow = np.array([20, 100, 100])
upper_yellow = np.array([40, 255, 255])
lower_black_h = np.array([35,10,0])
upper_black_h = np.array([120,230,255])
lower_black_l = np.array([0,0,0])
upper_black_l = np.array([120,120,60])
lower_white = np.array([0,0,125])
upper_white = np.array([180,50,255])
# 创建黄色和黑色的掩模
mask_yellow = cv2.inRange(hsv, lower_yellow, upper_yellow)
mask_black = cv2.bitwise_or(cv2.inRange(hsv, lower_black_h, upper_black_h), cv2.inRange(hsv, lower_black_l, upper_black_l))
mask_white = cv2.inRange(hsv, lower_white, upper_white)
# 合并黑黄区域的掩模并减去白色部分的掩模
mask_combined = cv2.bitwise_or(mask_yellow, mask_black) & ~mask_white
# 形态学操作(去噪+连接区域)
kernel = np.ones((5,5), np.uint8)
mask_processed = cv2.morphologyEx(mask_combined, cv2.MORPH_CLOSE, kernel)
mask_yellow = cv2.morphologyEx(mask_yellow, cv2.MORPH_CLOSE, kernel)
mask_black = cv2.morphologyEx(mask_black, cv2.MORPH_CLOSE, kernel)
# 查找轮廓
contours, _ = cv2.findContours(mask_processed, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
image_height, image_width = image.shape[:2]
# 筛选最大轮廓(假设标记是图像中最显著的物体)
if contours:
for cnt in contours:
if len(cnt) >= 5: # 至少需要5个点才能拟合椭圆
ellipse = cv2.fitEllipse(cnt)
(center, (width, height), angle) = ellipse
# 过滤条件:长宽均大于阈值
if width > image_width / 50 and height > image_height / 50:
# 创建空白掩膜(与原图同尺寸)
ellipse_mask = np.zeros_like(image[:, :, 0], dtype=np.uint8)
# 绘制填充的椭圆(白色)
cv2.ellipse(ellipse_mask, ellipse, 255, -1)
# --- 计算椭圆区域内的黄色和黑色占比 ---
# 提取椭圆区域内的黄色部分
yellow_in_ellipse = cv2.bitwise_and(mask_yellow, mask_yellow, mask=ellipse_mask)
yellow_area = cv2.countNonZero(yellow_in_ellipse)
# 提取椭圆区域内的黑色部分
black_in_ellipse = cv2.bitwise_and(mask_black, mask_black, mask=ellipse_mask)
black_area = cv2.countNonZero(black_in_ellipse)
# 计算椭圆总面积
ellipse_area = cv2.countNonZero(ellipse_mask)
# 计算比例(避免除零错误)
if ellipse_area > 0:
yellow_ratio = yellow_area / ellipse_area
black_ratio = black_area / ellipse_area
# 过滤条件:黄黑区域各占至少30%
if yellow_ratio >= 0.3 and black_ratio >= 0.3:
# 使用椭圆掩膜提取原图
label_in_image = cv2.bitwise_and(image, image, mask=ellipse_mask)
gray = cv2.cvtColor(label_in_image, cv2.COLOR_BGR2GRAY)
edges = cv2.Canny(gray, threshold1=50, threshold2=150)
# 直线检测与交点计算
lines = cv2.HoughLinesP(
edges,
rho=1, # 距离分辨率(像素单位)
theta=np.pi/180, # 角度分辨率(弧度单位)
threshold=50, # 检测阈值(累加器投票数阈值)
minLineLength=((width + height) / 2) / 4, # 最小线段长度(短于此长度的线段被丢弃)
maxLineGap=10 # 允许线段间的最大间隔(小于此间隔的线段合并)
)
# 延长线段
extended_lines = []
if lines is not None:
for line in lines:
x1, y1, x2, y2 = line[0]
# 延长线段,例如延长比例t=1.0
t=1.0
dx = x2 - x1
dy = y2 - y1
new_x1 = int(x1 - t * dx)
new_y1 = int(y1 - t * dy)
new_x2 = int(x2 + t * dx)
new_y2 = int(y2 + t * dy)
extended_lines.append([(new_x1, new_y1), (new_x2, new_y2)])
# 计算交点
intersections = []
if extended_lines:
for i in range(len(extended_lines)):
for j in range(i+1, len(extended_lines)):
line1 = extended_lines[i]
line2 = extended_lines[j]
# 计算夹角并过滤5°~175°以外的结果
angle = calculate_angle(line1, line2)
delta_angle = 85
if angle is None or not (90 - delta_angle <= angle <= 90 + delta_angle):
continue
pt = compute_intersection(line1, line2)
if pt:
# 检查交点是否在椭圆内
# 椭圆参数来自ellipse变量
# ellipse的格式是((h, k), (a, b), theta)
(h, k), (a, b), theta_deg = ellipse
theta = np.deg2rad(theta_deg)
x, y = pt
# 转换到椭圆的标准坐标系
x_trans = x - h
y_trans = y - k
# 旋转
x_rot = x_trans * np.cos(theta) + y_trans * np.sin(theta)
y_rot = -x_trans * np.sin(theta) + y_trans * np.cos(theta)
# 判断是否在椭圆内
if (x_rot**2)/(a**2) + (y_rot**2)/(b**2) <= 1:
intersections.append(pt)
# 聚类确定中心
if intersections:
X = np.array(intersections)
kmeans = KMeans(n_clusters=1).fit(X)
center_x, center_y = kmeans.cluster_centers_[0].astype(int)
(h, k), (a, b), theta_deg = ellipse
# (center_x, center_y) 即为目标点坐标
cv2.circle(image, (center_x, center_y), int(((width + height) / 2) / 20 + 0.5), (0, 0, 255), int(((width + height) / 2) / 50 + 0.5))
cv2.ellipse(image, ((float(center_x), float(center_y)), (a, b), theta_deg), (0, 255, 0), int(((width + height) / 2) / 50 + 0.5))
print("angle: {}, {}".format(calculate_tilt_angle(a, b), (a, b)))
if use_camera_flag:
fps = 1 / (current_time - prev_time)
fps_list.append(fps)
if len(fps_list) > 5:
fps_list.pop(0)
avg_fps = sum(fps_list) / len(fps_list)
# 将帧率文本绘制到左上角
cv2.putText(
image,
f"FPS: {fps:.2f}", # 显示两位小数
(10, 30), # 左上角坐标 (x, y)
cv2.FONT_HERSHEY_SIMPLEX, # 字体
1, # 字体大小
(255, 255, 255), # 颜色 (BGR格式,白色)
2, # 字体厚度
)
# 显示结果
cv2.namedWindow("Result", cv2.WINDOW_NORMAL)
cv2.resizeWindow("Result", 500, 500)
cv2.imshow("Result", image)
if not use_camera_flag:
cv2.waitKey(0)
cv2.destroyAllWindows()
cv2.imwrite("output.jpg", image)
break
else:
prev_time = current_time
if cv2.waitKey(1) == ord('q'):
cap.release()
break
cv2.destroyAllWindows()
效果
部分图片取自c++识别象限标 —— 灯火~


具有一定的抗倾斜能力