本文来自自动驾驶之心知识星球的国内首个BEV感知全栈系列学习教程
文章目录
- BEV开源数据集介绍:KITTI
- BEV开源数据集介绍:nuScenes
- BEV开源数据集介绍:Waymo
BEV开源数据集介绍:KITTI
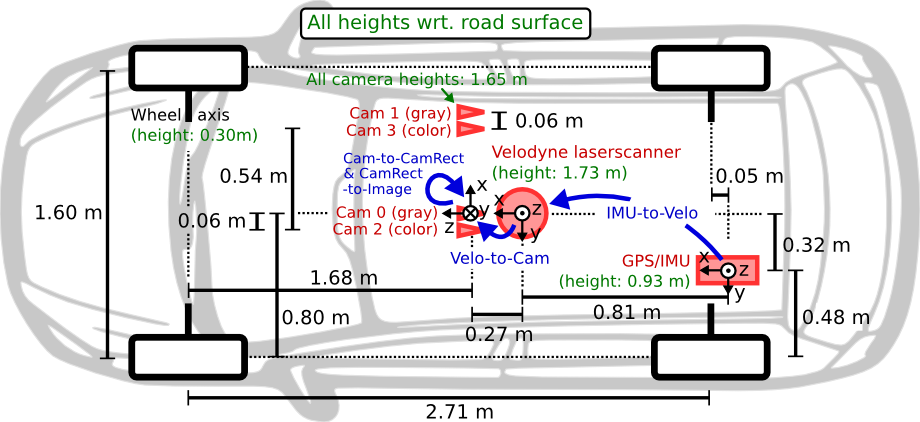

KITTI数据怎么采集?
- 通过车载相机、激光雷达等传感
器采集
KITTI数据规模有多大? - 共14999张图像及其对应点云
- 其中7481张作为训练集,7518张作为
测试集 - KITTI标注了哪些目标?
- 目标类别包括:车、行人和骑车的人
- 共计80256个标注对象
下载方法
科学上网:
https://www.cvlibs.net/datasets/kitti/eval_object.php?obj_benchmark=3d
openmmlab & OpenDataLab
# install openmim
pip install -U openmim
# install OpenDataLab CLI tools
pip install -U opendatalab
# log in OpenDataLab. Note that you should register an account on [OpenDataLab](https://opendatalab.com/) before.
pip install odl
odl login
# download and preprocess by MIM
mim download mmdet3d --dataset kitti
结束后的数据列表
│ ├── kitti
│ │ ├── testing
│ │ │ ├── calib
│ │ │ ├── image_2
│ │ │ ├── velodyne
│ │ ├── training
│ │ │ ├── calib
│ │ │ ├── image_2
│ │ │ ├── label_2
│ │ │ ├── velodyne
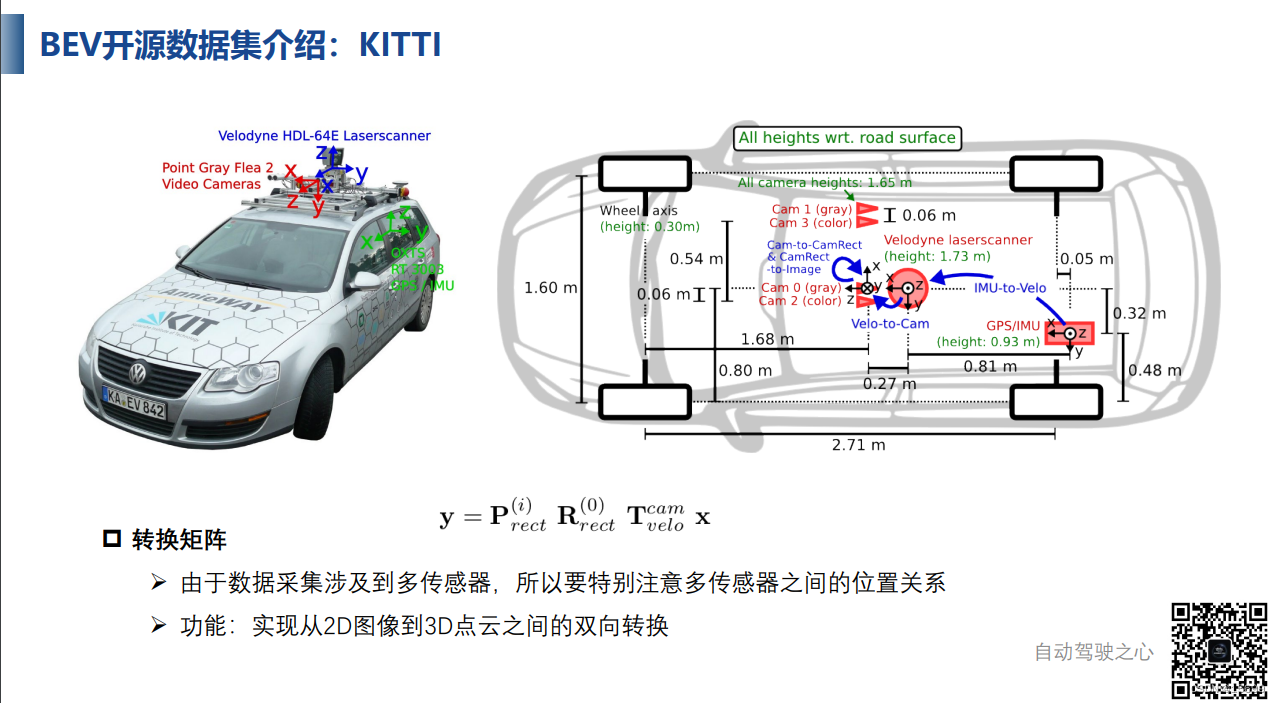
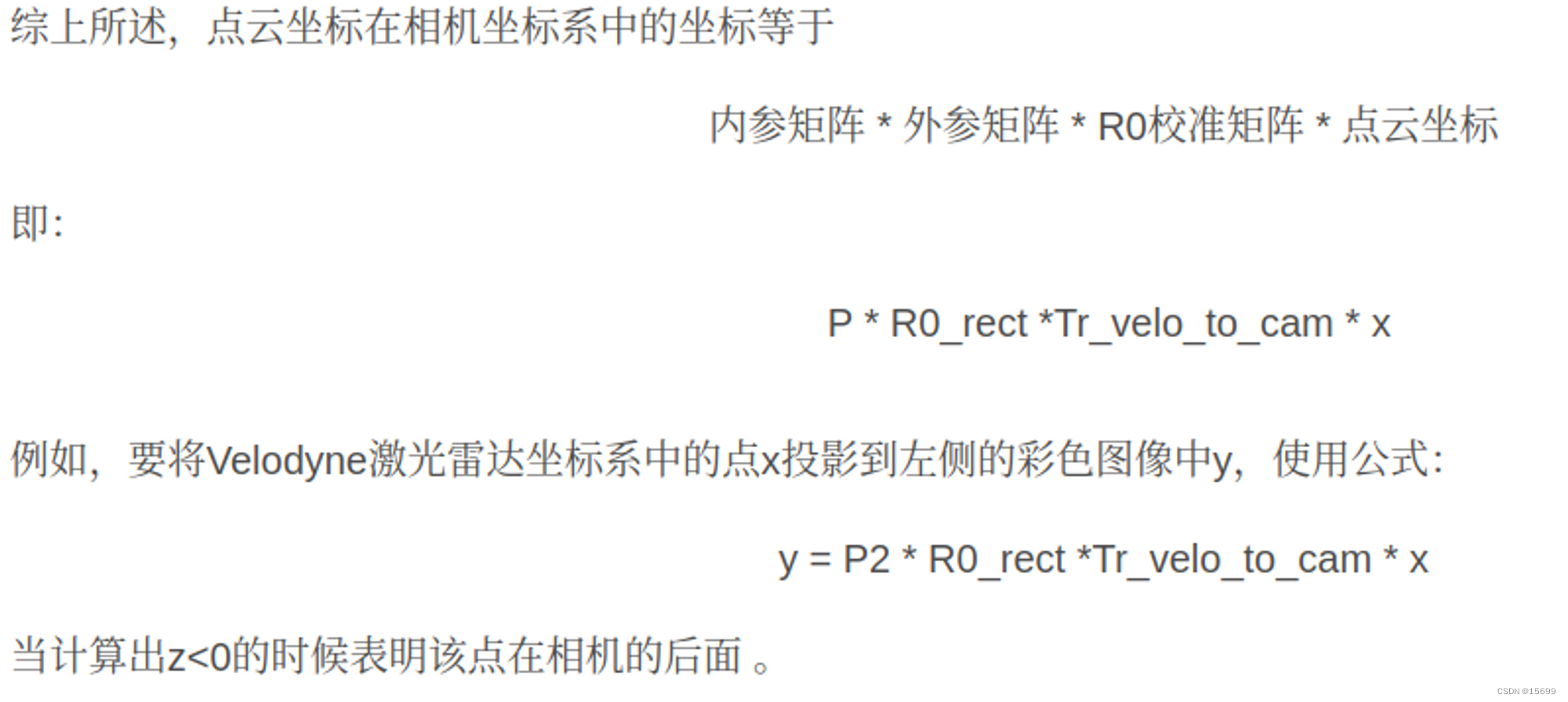
转换公式详细参考
https://blog.csdn.net/qq_33801763/article/details/77033064
标注信息
Object type Truncation Occlusion alpha Left top x Left Top y Right bottom x Right Bottom y Height Width Length location X location Y location Z Rotation angle
Truck 0.00 0 -1.57 599.41 156.40 629.75 189.25 2.85 2.63 12.34 0.47 1.49 69.44 -1.56
BEV开源数据集介绍:nuScenes
科学上网
https://www.nuscenes.org/nuscenes#download
下载方式
openmmlab & OpenDataLab
# install openmim
pip install -U openmim
# install OpenDataLab CLI tools
pip install -U opendatalab
# log in OpenDataLab. Note that you should register an account on [OpenDataLab](https://opendatalab.com/) before.
pip install odl
odl login
# download and preprocess by MIM
mim download mmdet3d --dataset nuscenes
BEV开源数据集介绍:Waymo
论文链接为:https://arxiv.org/abs/1912.04838v7
项目链接为:https://github.com/waymo-research/waymo-open-dataset
数据集链接为:https://waymo.com/open
Waymo 开放数据集由两个数据集组成,
- 一个是感知数据集,包含 2,030 个场景的高分辨率传感器数据和标签;
- 另一个是运动数据集,包含 103,354 个场景的物体轨迹和相应的三维地图。
2D object detection
3D object detection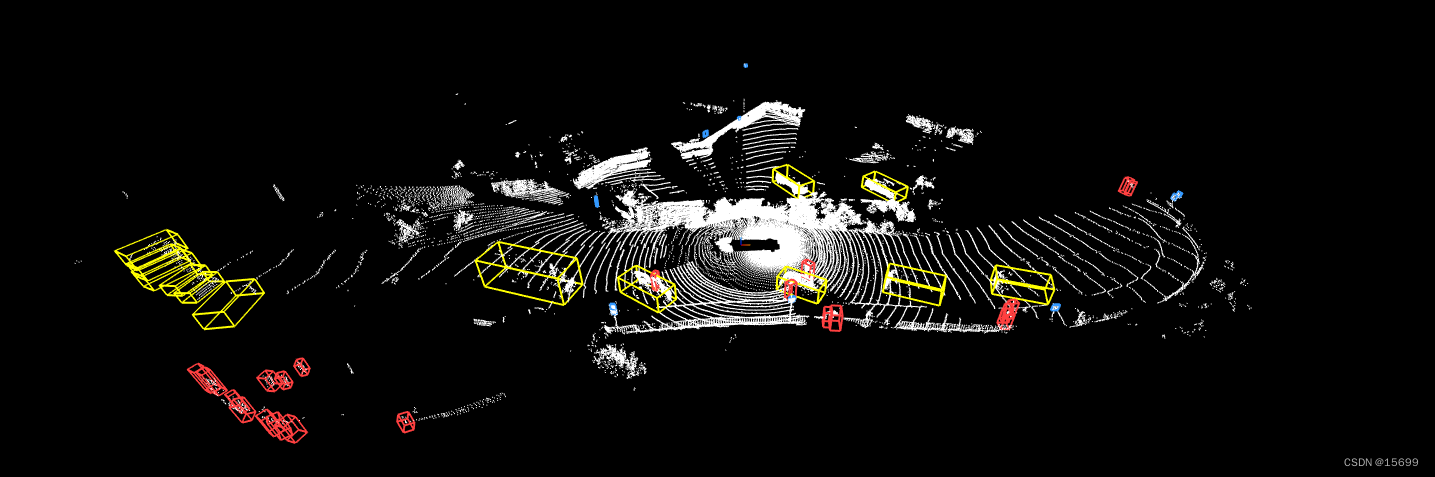
传感器位置
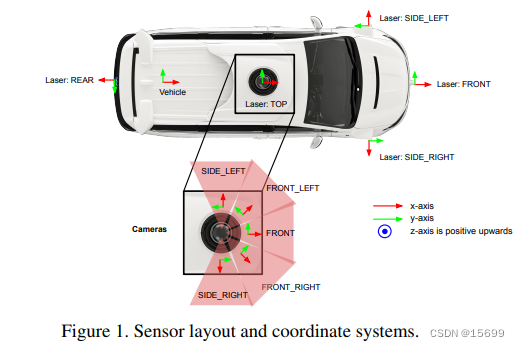
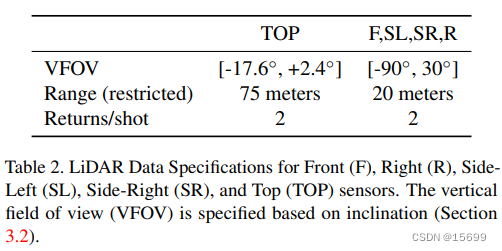
Lidar 参数
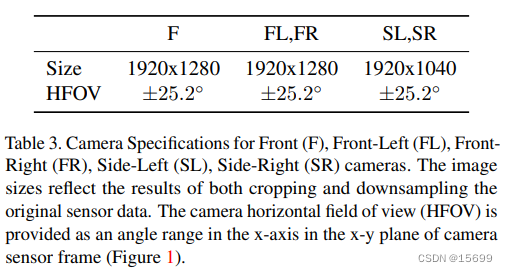
相机参数
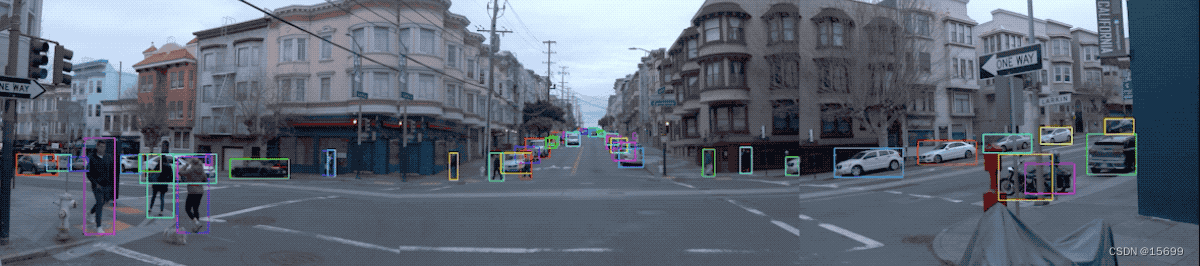
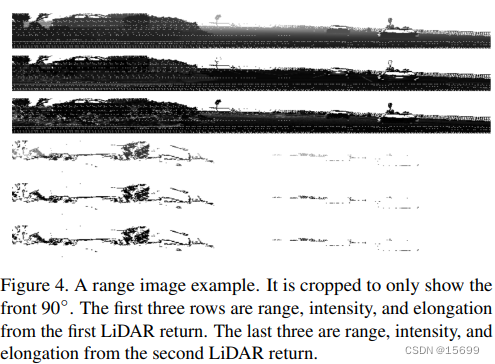
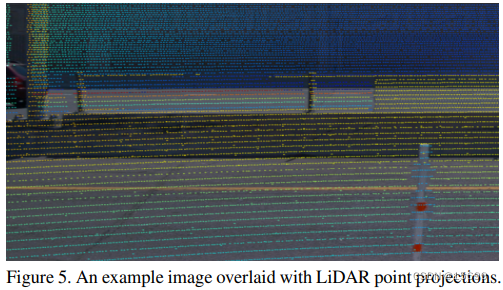
相机和lidar的图片
和其他数据集的对比
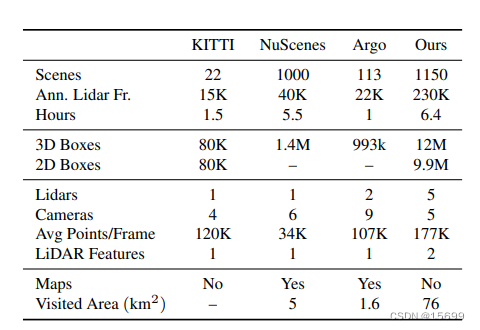
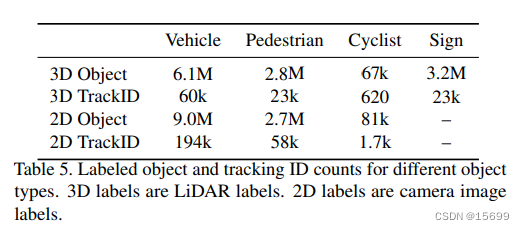
下面两张表格给出了数据集分布情况,不同城市,不同天气,不同类别目标的统计情况。
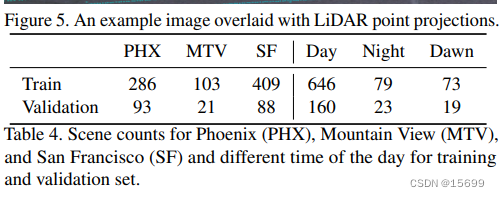
不同类别目标的统计情况。