课程链接三维视觉
作业任务任务
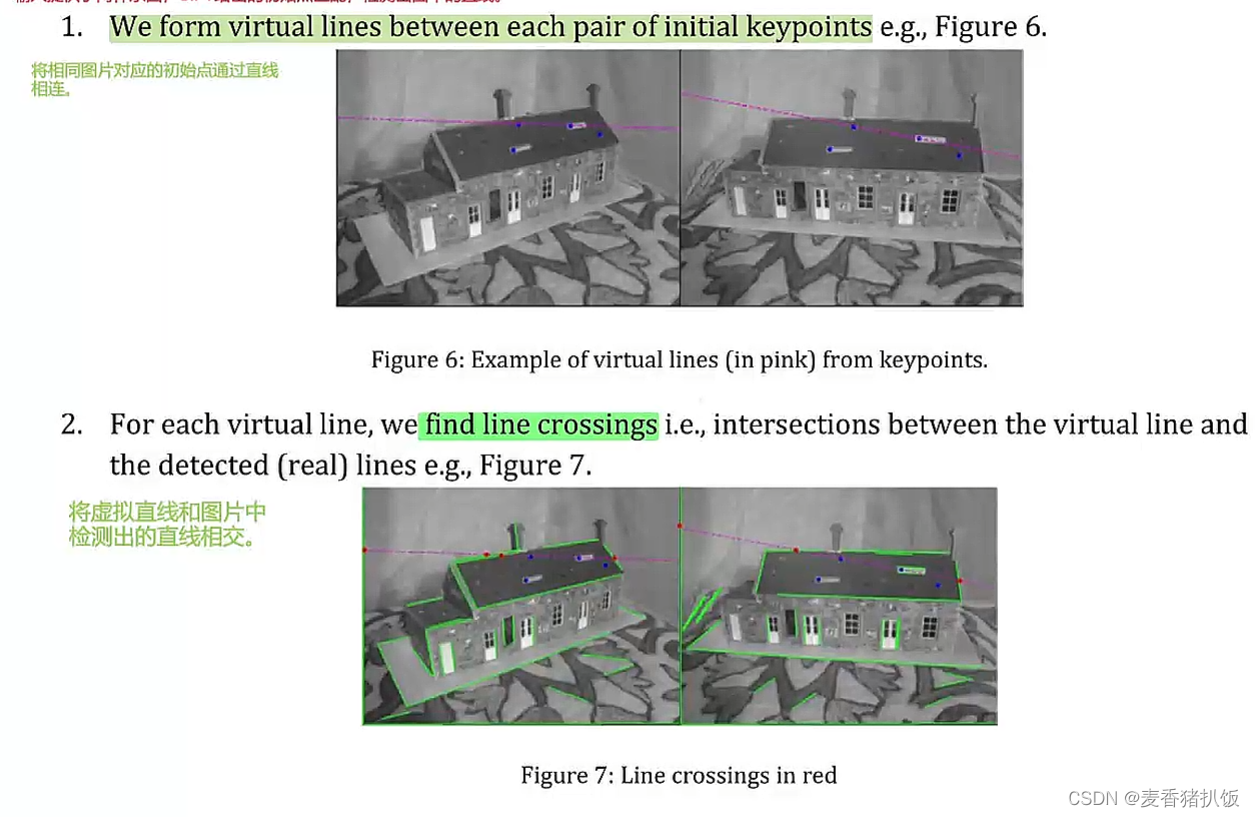
课程任务就一个,实现一个Linear Sweep Algorithm,这个算法是用来检测两张图片之间的对应点。
因为SIFT检测如果把检测点的数量增大,可能会存在一些错误错误检测点,所有通常把SIFT检测的点的数量k设置为很小,这样虽然减少了出错率,但是检测的点少了。所有我们需要使用linear sweep算法补充这些点。
实现
他给出的实现已经写的很清楚了。
需要实现五个方法:
- get_keypoints
- get_matches
- convert_line_pts_to_lines
- get_line_intersections
- get_line_crossings
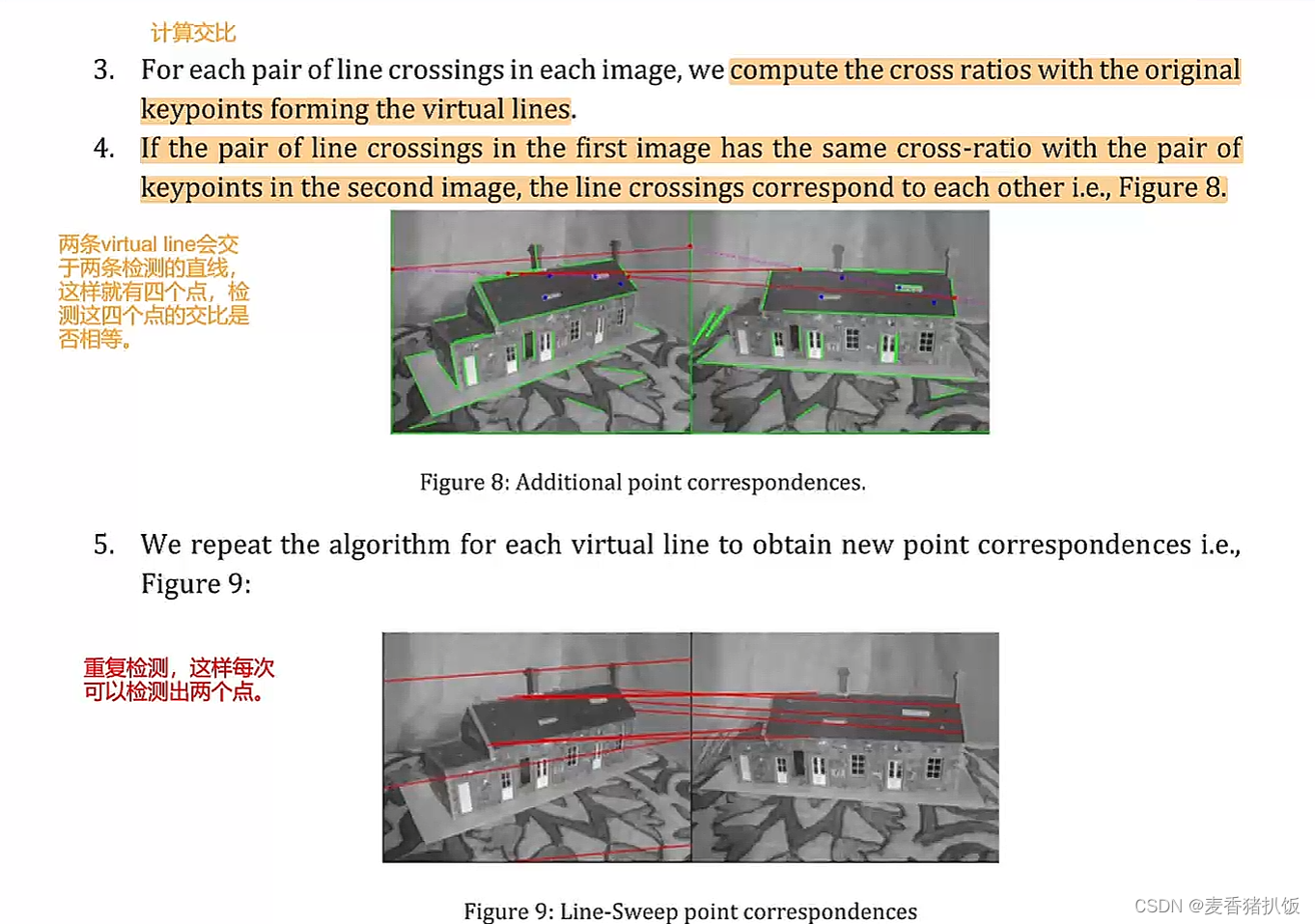
- get_cross_ratios
都比较简单,convert_line_pts_to_lines是两种直线不同表示方法之间的转换,原本的表示是起点和终点,两点确定一条直线,通过这个函数变成直线的标准形式(a, b, 1),也即是ax+by+1 = 0。其中l = (a, b, 1)需要满足 l x T = 0 , l y T = 0 lx^T = 0, ly^T = 0 lxT=0,lyT=0。所有直接算叉乘就行了。
# 直接求叉乘就完事了,因为X * (X x Y) = 0, Y * (X X Y) = 0, 说明XY都在(X x Y)上了。
lines = np.cross(pts, other_pts, axis=1)
# 最后一项归一化成1
lines = lines / (lines[:, -1].reshape(lines.shape[0], 1))
get_line_intersections算直线的交点,也是算叉乘就行:
intersections = np.cross(lines, other_lines)
intersections = intersections / (intersections[:, -1].reshape(intersections.shape[0], 1))
get_line_crossings算当前直线和检测直接的交点,这里麻烦一点,因为我们还需要确认交点是不是在起点和终点的范围内,所有求出交点后还需要对交点进行过滤。这里的过滤方法是:如果 P P P是在 P 0 P_0 P0和 P 1 P_1 P1方法之间,那么就有 0 < P 0 P ∗ P 0 P 1 < = ∣ P 0 P 1 ∣ 2 0<P_0 P * P_0P_1 <= |P_0P_1|^2 0<P0P∗P0P1<=∣P0P1∣2,因为 P P P在 P 0 P 1 P_0P_1 P0P1上的的投影肯定在 P 0 P 1 P_0P_1 P0P1上。
# 保证get_line_intersections的输入
v_lines = np.ones_like(r_lines)
v_lines[:, ] = v_line
# 计算交点
line_intersections = get_line_intersections(v_lines, r_lines)
# 判断是否是在线段中间
# P如果在P0和P1的中间,那么把PP0投影到P0P1一定会在0到|P0P1|上,所有有0 < P0P * P0P1 < |P0P1|^2
for i, point in enumerate(line_intersections):
prod = (point[0] - r_start_pts[i][0]) * (r_end_pts[i][0] - r_start_pts[i][0]) + \
(point[1] - r_start_pts[i][1]) * (r_end_pts[i][1] - r_start_pts[i][1])
sqrlen = (r_end_pts[i][0] - r_start_pts[i][0]) * (r_end_pts[i][0] - r_start_pts[i][0]) + \
(r_end_pts[i][1] - r_start_pts[i][1]) * \
(r_end_pts[i][1] - r_start_pts[i][1])
if (prod >= 0 and prod <= sqrlen):
line_crossings = np.concatenate((line_crossings, point))
line_crossings = line_crossings.reshape(-1, 3)













![[附源码]Nodejs计算机毕业设计基于框架的校园爱心公益平台的设计与实现Express(程序+LW)](https://img-blog.csdnimg.cn/9b5ccb157f3c40fbb08ffd43ef161acd.png)


