载波相位测量:解决两个关键问题,即整周模糊度计算和周跳检测。
整周模糊度的快速固定是研究重点。目前成熟方法是模糊度协方差法,分为模糊度实数解估计和模糊度搜索两个过程。实数解估计通常采用kalman滤波,它为搜索算法提供搜索空间。
实数解方法,有正则化方法、岭估计方法、抗差岭估计方法、阻尼方法。
模糊度搜索,涉及到空间确定、搜索方法和确认准则。搜索空间中心由模糊度的实数解决定,形状大小由协方差矩阵决定。
搜索方法有,FARA、FASF、Cholesky分解法、LAMBDA法;搜索依次为LAMBDA>FASF>FARA。
单差、双差、三差
单差,两个地面卫星接收机观察同一个卫星,星钟差被消掉了,对流层延迟误差、电离层延迟误差得到削弱,基线较短时,可以认为基本消除。但还存在一个接收机钟差互差没有消除。
双差,两个单差再进行组差得到的结果称为双差。经过组差,接收机钟差已经被消除了。虽说也进一步放大接收机噪声,减少了观测量,但双差观测量放大的接收机噪声仍然在我们可以接受的范围(毫米级),且此时,主要的误差源已经得到的大幅度削弱或消除,因此,载波相位双差观测量通常是相对定位解算的主要观测量。
三差,它消除了除未知点三个坐标参数之外的所有未知数,同时也消除了大气误差,接收机钟差,卫星钟差等各项误差的影响。观测方程也最为简单。但是它也进一步放大了观测噪声,减少了观测量。因此,它一般用来解算未知点坐标的初值,或者用来检测周跳、搜索模糊度。
载波观测量经过双差组合之后,其残余误差源主要有:卫星星历误差、电离层延迟、对流层延迟、多路径效应误差、观测噪声。通常认为,基线长度小于 15 公里时,卫星星历误差、电离层延迟可以认为基本消除;对流层延迟则与距离及两站的高差都相关,若高差不大,则也可以认为基本消除,此时,多路径效应和观测噪声为主要误差源。大于15 公里时,误差时空相关性减弱,需要考虑残差项的改正。
误差来源:
1.星历误差: 我们可以获得的星历大体可以分为六种两大类。一类是广播星历,它是依据已有观测数据按照卫星运动规律外推得到的星历。其精度取决于数据质量、轨道摄动模型的准确性及外推时间。受初始位置误差及外推时间的影响,精度随着外推时间的增加会显著降低。目前官方标称精度为 5 米,实际精度为 3 米。另一类星历为是根据实测资料进行拟合处理而直接得出的星历。它需要在一些已知精确位置的点上跟踪卫星来计算观测瞬间的卫星真实位置,从而获得准确可靠的精密星历。精密星历大部分在数据采集之后延迟 3~14 天得到,精度可达厘米级。
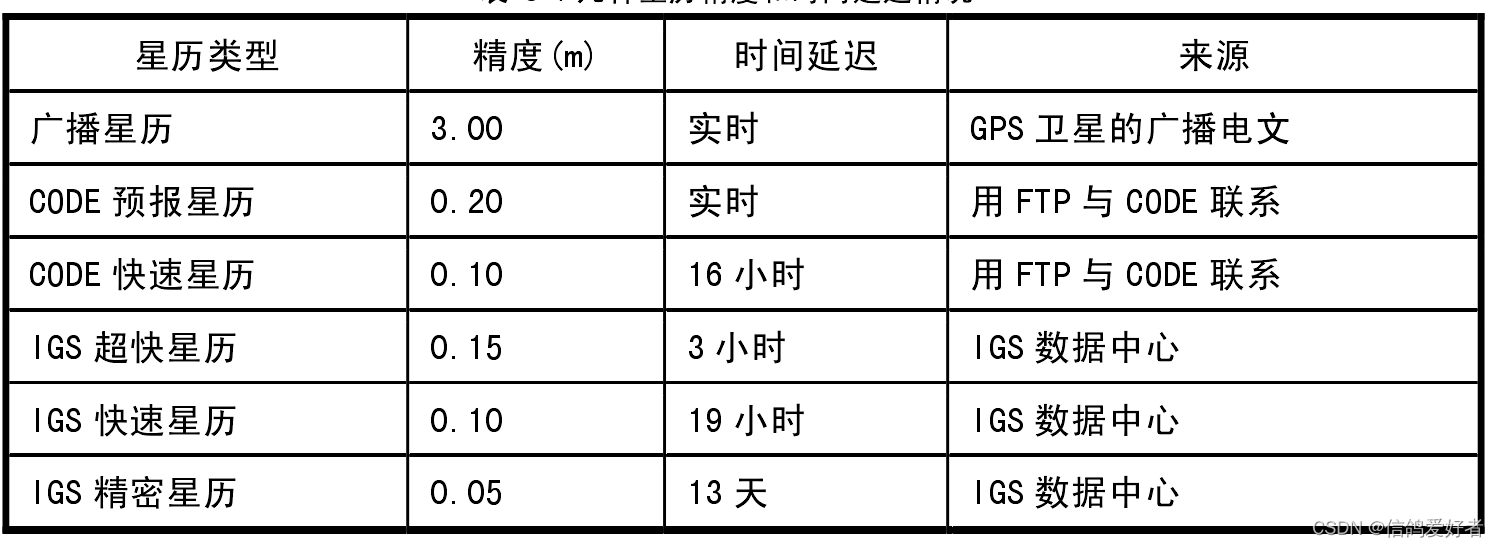
若采用广播星历进行相对定位,则60公里的距离由星历误差引起的相对定位误差约为0.9cm。若采用精密星历,则5000公里距离由星历误差引起的相对定位误差约为1.2cm。
2.电离层折射延迟
电离层延迟引起的距离误差,最小约1-3m,最大则可达到150m。电离层延迟的大小与时间、太阳黑子变化周期、地理纬度、高程等多个因素有关。
改正方法有观测量组合法、双频改正和三频改正。
三频改正法,在电子总量较大的情况下各个频率和双频组合上的二阶项误差可达到5cm以上;在一般情况下也超过1.7cm。北斗、伽利略系统均具备三频,因此对二阶项的改正非常必要。
3.对流层延迟
对流层的定义在各个学科各不相同。在卫星导航相关领域的定义中,对流层指由地表向上约 40 公里范围内的大气层。对流层属于中性大气层,对于 15GHz 的电磁波是不散射介质,其影响与频率无关。通常,在天顶方向,对流层延迟的影响约 2~3 米,但低仰角的情况下,对流层延迟可达数十米。因此,在相对定位中对流层延迟也是一项重要误差源。
对流层延迟的改正方法有多种,主要有射线描迹法、折射率模型法、模型函数法、参数估计法和水汽辐射法五种。射线描迹法是按照式(3.47)的方式积分得出的结果,其计算方法非常复杂,需要的已知条件也较多,代价高昂,但其理论严密,计算结果准确。由于需要已知条件较多,不适合用于动态测量,本文不做过多讨论。折射率模型法是对折射率建模。但其中常数项需要根据气象资料获取,不同的气象资料得到的数据也不一样。模型函数法基于任意方向上的路径延迟均与天顶方向路径相关的假设,将大气延迟误差写成天顶延迟改正和映射函数乘积的形式。该方法计算简单,只需要几个地面气象参数就可以获取对流层延迟,增加新的未知参数,在 GNSS 定位中得到广泛应用。由于采用地面气象参数来估计整个传播路径的延迟,理论上并不严密,且大气中的水汽变化非常复杂,模型法很难将真实对流层延迟计算出来,因此,在处理高精度数据时,将模型改正值作为先验值,然后将天顶延迟的剩余误差作为待定参数,与待定点坐标以及其他未知量一起求解估计,叫做参数估计法。参数估计法可以显著提高定位精度和坐标重复率,但参数估计法增加了未知参数个数,估计参数不宜过多,参数设置以每两小时设一个参数为宜。
参数估计方法,分为单参数估计、多参数估计和随机过程。
4.多路径效应误差
多路径效应的大小主要取决于反射物距测站的距离和反射物光滑程度及GNSS卫星信号的波长等多种因素。
GPS 对于 P 码,多路径效应误差范围一般在±2 米,C/A 码可达±15 米。
改进方法:空间处理技术、接收机改进技术和数据后处理技术。
数据后处理技术是从原始的观测或定位结果数据中分离或抵消多路径效应的影响。目前的数据后处理技术有数种,如信噪比技术、基于扩展卡Kalman滤波法、仰角加权方法[、三次多路径单差值改正法、基于EMD的虑波方法等,但这些无一例外都是针对静态或外部环境变化很小的动态变形监测等一些固定环境条件下的处理方法。对于动态相对定位测量目前尚无有效的数据后处理技术。
由于相位观测值波长要比伪码的波长小得多,相应载波相位观测值上的多路径误差也比码伪距上的多路径误差要小得多,并且相位观测值的观测精度要比码伪距观测精度高两个数量级以上,可以采用相位平滑伪距的方法削弱码伪距观测值多路径误差。采用相位平滑伪距的方式,由于测量噪声、电离层残差等因素的影响,可以将码伪距的多路径效应误差降低到0.5m以下。在动态相对定位中,相位平滑伪距可以提高初始点位精度,提高加速模糊度固定,但对于载波相位的相对定位结果并无改善。


![The remote endpoint was in state [TEXT_FULL_WRITING]](https://img-blog.csdnimg.cn/053294cf1aba4f399939b72484424c91.png)


![[BitSail] Connector开发详解系列四:Sink、Writer](https://img-blog.csdnimg.cn/cbe42221da944511b2bf7e191c729c57.png#pic_center)