VESC TOOL电机配置(一)
欢迎加入 创客基地 电机控制企鹅群 讨论电机控制相关问题:732557609
欢迎光临 创客基地 tao宝店 采购产品:
https://makerbase.taobao.com/
提示:可以按快捷键“Ctrl+F”快速寻找相关问题。
官方问题处理:
https://vesc-project.com/forum
官方教程与硬件等:
https://vesc-project.com/documentation
注意:该文档会不断维护更新,如各位遇到问题并成功解决也可在企鹅群732557609 私聊@管理员,帮忙不断完善该文档。
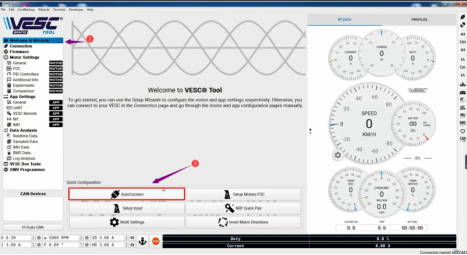
(一)Motor Setting->General
1、General
(1) Motor Type:电机类型
①BLDC
永磁同步电机的方波换向模式。
②DC
直流电机。直流电动机连接到相线1和相线3。
③FOC
用于PMSM(或BLDC)电机的磁场定向控制(FOC)。电机用正弦波进行换向,而不是像BLDC换向那样用方波进行换向。FOC使电机运行更安静(尤其是在低速和高负载下),效率略高,并提供自动最佳定时。
④GPD
第1阶段和第3阶段之间的通用驱动器。应与VESC上的自定义应用程序一起使用,或与提供样本的VESC Tool后端一起使用。
(2)Invert Motor Direction:
反转电机方向。此选项可用于使电机反向转动。mc_interface中的所有状态和控制命令都将遵循该设置,因此对于所有应用程序,因此它应该可以像切换两根电机相序一样工作。
说简单点,就是电机三相线可以随便接,电机方向可以通过这个设置来修改过来。
2、Sensors
(1)Sensor Port Mode:传感器接口的工作模式。
可以进行更改以与不同的转子位置传感器兼容。 请注意,此设置在无传感器运行时不会产生任何作用。
支持的模式有:
①Hall Sensors:霍尔传感器模式
电机内置霍尔传感器,位置分辨率为 120 度。
②ABI Encoder:增量式编码器
具有 A-B-Index 输出的旋转编码器。 请注意,在找到索引脉冲之前,该编码器不会提供帮助;因此,当运行FOC开环模式时,电源启动后,第一次在尝试运行电机时,会使用最多一圈机械旋转来查找索引位置。
请注意,您还必须设置编码器计数(分辨率)才能使用此类编码器。 这通常是每转脉冲数乘以4(比如TLE5012BE1000编码器:4096*4=16384),因为两个脉冲对的每个边沿都会被计数。
③AS5047 Encoder:绝对值(SPI)编码器
通过SPI连接的AS5047磁性编码器。这个从一开始就提供了绝对位置,但往往有一点非线性。
④AS5X47U Encoder:绝对值(SPI)编码器
通过 SPI 连接的 AS5147U 或 AS5247U 磁性编码器。它与 AS5047 类似,但具有额外的安全功能,使其能够达到汽车安全级别。它必须连接到COMM 端口中的SPI。 要使用此编码器,您必须确保没有应用程序使用 UART、I2C、ADC2 或 ADC3。
⑤SIN/COS Encoder:正弦/余弦编码器
正弦/余弦编码器是一种类似于正交编码器的位置反馈设备,不同之处在于它不输出数字脉冲,而是输出正弦形状偏移 90°的模拟电压。从一开始就提供绝对位置,但它对 EMI 敏感,需要特殊的滤波、瞬态保护和屏蔽布线。
⑥TS5700N8501 Encoder:RS485接口编码器
该编码器使用RS485,因此必须连接到COMM端口。 需要一个RS485 收发器,例如ADM485,其中 RX 和 TX 用作数据线。 ADC1用于在 RX 和 TX 之间触发,这是必须的,因为通信是半双工的。要使用此编码器,您必须确保没有应用程序使用 UART 或 ADC1。
⑦TS5700N8501 Encoder Multiturn:
与上面的模式基本相同,但使用多圈的功能。该角度除以10000,因此最多可用于10000转。位置PID参数需要增加约10000倍,才能与单圈模式类似地工作。请注意,现在这不是一个好方案,需要在未来进行改进。180度PID设定点对应于多圈位置0。
⑧MT6816 Encoder:高速绝对值(SPI)编码器
一种使用高速SPI通信的磁性编码器。提供从一开始的绝对位置。它必须连接到基于硬件的SPI外围设备。
⑨BISSC Encoder:RS422接口编码器
该编码器使用RS422,因此必须连接到COMM端口以进行高速通信。需要诸如MAX490的RS422收发器,其中CLK和MISO被用作时钟和数据输入线。要使用此编码器,您必须确保没有应用程序使用UART或ADC1。ABI分辨率字段用于设置BISSC编码器精度:2(BISSC分辨率),2的BISSC分辨率次方。
⑩TLE5102 Encoder:双向SSC协议的磁性编码器
一种使用双向SSC协议的磁性编码器。提供从开始的绝对位置和错误保护通信。目前,“SSC SW”和“SSC HW”都使用软件位敲打。“SSC SW”使用霍尔连接器引脚,该引脚不得带有过滤器。“SSC HW”使用7-8针adc/uart连接器。建议使用5v传感器电源。
电线必须被屏蔽和/或一起运行,否则会出现通信错误。
“SSC SW”连接:HALL1=SCK,HALL2=DATA,HALL3=CS
“SSC HW”连接:ADC1=SCK,TX=DATA,NSS=CS
⑪Custom Encoder:自定义编码器
这意味着加载了一个本地库,该库处理编码器的读取并提供解码的角度。
(2)ABI Encoder->Encoder counts:编码器计数
①ABI Encoder
A-B-Index 编码器的计数数量。 这通常是编码器分辨率乘以 4,因为正交信号中的每个边沿都会被计数。 此设置仅在使用 ABI 编码器时才重要。
②BISSC Encoder
BISSC 编码器的位数。这是单圈编码器的编码器分辨率位数。
(3)Sin/Cos Encoder
略。
3、Current
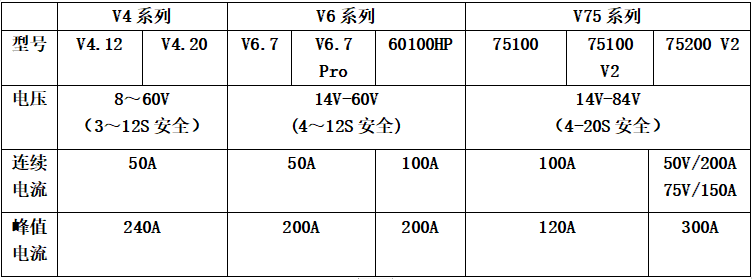
应用电压和电流是它们之间的主要区别,根据您的电池电压、电流需求、速度要求等选择电调。
(1)Motor Current Max:
电机可以处理的最大电流(安培)。请参阅您的电机的电机规格。建议先用比较小的值来测试,保证板子与电机的安全。
示例: 如果我们的电机可以处理 40A,但我们建议将其设置为 30A开始测试。一旦感觉没问题,您就可以继续提高设置的电流。强烈建议采用安全的方法获得更高的值(例如仅从 15-20A 开始)。
提示: 该值可以大于电池电流最大值,从而在部分油门时产生更高的电机功率输出。在最大油门时,如果设置低于电机电流最大值,则电池电流最大值为限制值。
(2)Motor Current Max Brake:
当电机作为发电机运行时允许产生的最大电流输出。电动汽车可以使用电机作为制动器,在车辆减速时产生能量。产生的能量将存储在电池中。该值不应高于电机的连续电流最大值。提示:如果电池电流最大再生电流可以存储生成的电流,则较高的值可以获得更强的制动。
(3)Battery Current Max:电池最大输出电流
电池额定的最大连续电流。
可以从电池汲取的最大电流。 电池电流始终小于或等于电机电流。
设置该部分的数值,可以限制从电池到电机的电流量。
当电机接收的电流超过其能够承受的电流太长时间(通常是上坡时)时,很容易被烧毁。因此,通过VESC的可调电流输入设置,电机或电调永远不会被烧坏(除非电流输入值设置得太高)。
请参阅您的电池规格以进行安全设置。
例如: 锂聚合物电池通常为 C 级电池。5800mAh、额定25C的电池可以处理5.8A*25=最大 145A,但是由于制造商经常高估电池,所以建议将其值减半。出于安全原因,我们将使用最大72A。
提示: 由于我们的电机最大电流设置为 30A,因此我们也可以使用 30A 的电池。
从技术上看,电池电流没有理由设置高于电机电流最大值的值。
(4)Battery Current Max Regen:电池最大吸收(充电)电流
设置再生功率的最大值,这是为了确保制动或续流时电池不会接收过多的电量。
制动时允许ESC电流反灌到电池或电池管理系统(如果包含在您的系统中)的最大电流。
电池电流最大再生对于高速制动强度非常重要,设置过低会导致高速制动较弱!该值不应超过电池的最大突发充电电流额定值或电池管理系统的能力。因此,对于带有大电池(例如12S4P LiIon)的滑板,我们将其设置为-30A。
(5)Absolute Maximum Current:运行的峰值最大电流。
电流大小,高于该电流大小,所有输出将被关闭并抛出故障代码。 通常,电流控制环路负责限制电流,但在某些情况下,短电流尖峰可能会很快出现。 在大多数情况下,系统可以很好地处理它们,因此与其他当前值相比,该值可以设置得相对较高,以避免中断。
4、Voltage
(1)Battery Voltage Cutoff Start:低于该值,降功率;
(2)Battery Voltage Cutoff End:低于该值,停止运行;
设置电池保护,防止放电过度,电压过低。
这个过程也称为电压保护。它可以保护电池免遭过度放电。如果电池过度放电,很容易击穿。
一般只需要在“Cells”中填写电池节数,再点击“Apply”更新数值即可。
5、RPM
(1)Max ERPM:正转最大值
(2)Max ERPM Reverse:反转最大值
ERPM设置(速度设置)。
电机 ERPM = 电机转速 (RPM) * 电机极对
V4 ERPM: 60000
V6 ERPM: 150000
75 系列 ERPM: 150000
为确保兼容性,请确保电池电压在规格范围内,并且电机ERPM不超过电调的电压。
电机转速=电池电压*电机KV值
电机 ERPM = RPM* 电机极对=电池电压*电机 KV* 电机极对
例如: 以设置6374电机190KV在电池60V为例:
电机最大转速=60V190KV=11400,ERPM=114007(14极,7对)=79800
ERPM=79800>60000,6374电机工作在60V电压,不适合V4系列电调。
在这种情况下,您可以降低工作电压或降低电机KV以与电调兼容。
(3)ERPM Limit Start(ERPM 限制启用)
这个百分数不会限制你的最高速,他是限制的是最高速的变化值。简单来说是允许的最高速的波动范围。
设置过高,有可能会出现电机跑到最高速之后出现抖动的现象,这是因为电机频繁的加速刹车,不断的换相导致的。
设置过低,可能会出现老是跑不到最高速的情况。
6、Temperature
设置您希望ESC能达到的最高温度。
这样既可以防止电调过热烧毁,也可以防止温度过高损坏电机。
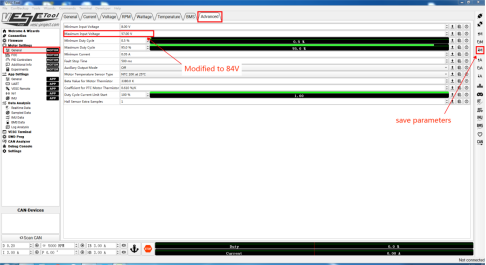
7、Advanced
(1)Minimum Input Voltage:最小工作电压
(2)Maximum Input Voltage:最大工作电压
设置主板可运行的电压范围。 
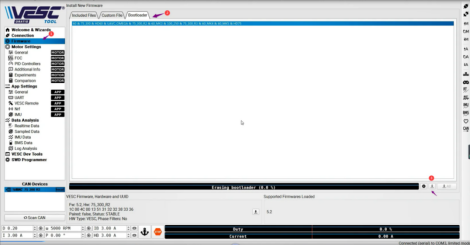
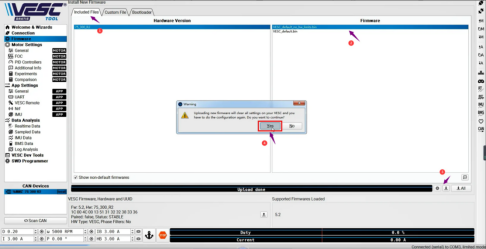
vesc_tool 默认最大。电压只有72V,所以当我们使用超过72V的电池时,就会出现过压错误故障码提醒。在这种情况下,请进行固件更新并选择no_limit以将电压更改为更大。
第1步:下载 no_limits 固件版本
第2步:设置最大电压。
(3)Minimum Duty Cycle:开始进行控制的最小占空比;
(4)Maximum Duty Cycle:进行控制的最大占空比;
最小占空比设置过小,静止状态可能会出现没有拨动遥控,电机出现抖动的情况;