前言:此次记录无人车自启动过程遇到的问题。为了让ROS无人车能够实现飞控进行室外自主航线的问题,将飞控发布的PWM转为ROS无人车对应的速度。为了确保无人车启动后能够使用遥控器控制无人车,所以需要开机自启动。
硬件:
1、starrobot驱动板
2、jetson nano b01
3、pixhawk2.4.8
软件
1、starrobot_bringup
2、ros-melodic
3、PX4/APM
问题:
单独运行脚本文件./xxx.sh,可以正常启动launch文件和节点,但是使用自启动就不行,报错某个参数找不到。
如下这里报错没有STARROBOTBASE参数对应的环境变量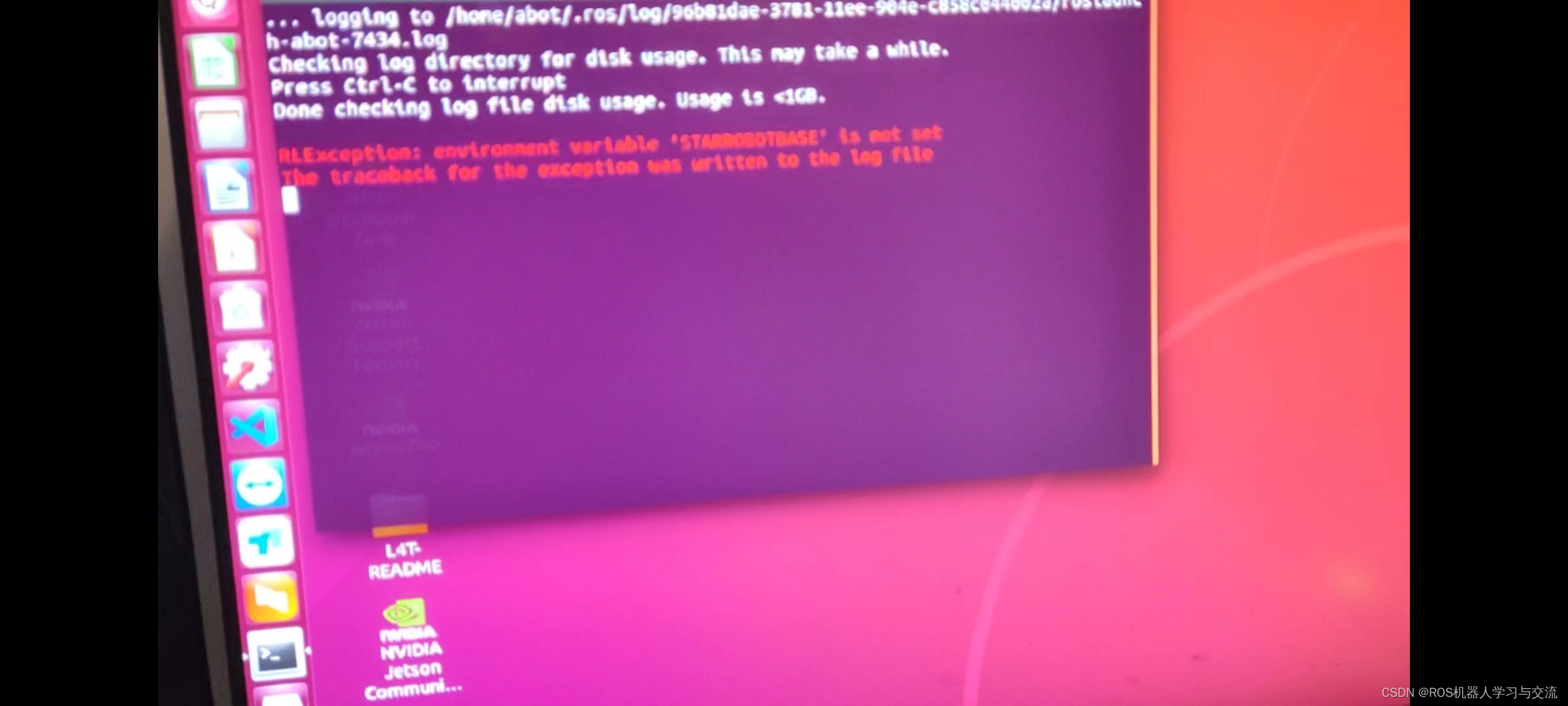
原因:这是因为这个变量参数是通过.bashrc文件export进来,自启动的时候,在root权限启动,会导致找不到变量。所以单独启动是正常的,自启动就不行了。
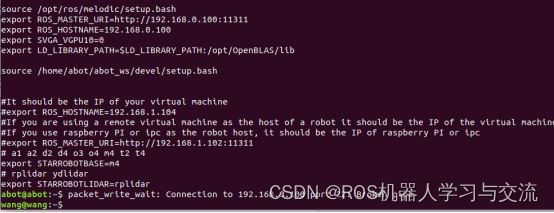
这里启动的时候,需要加载.bashrc文件中的参数所以自启动失败了
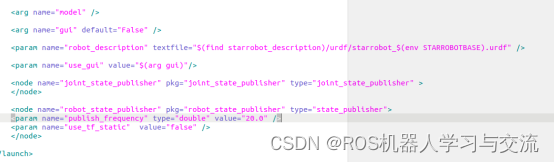
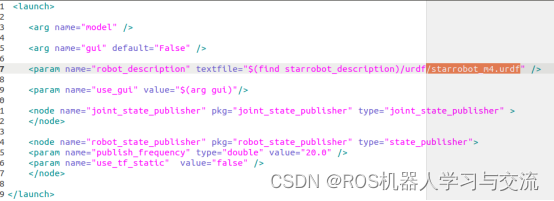
修改:直接写定参数即可:将其中的STARROBOTBASE改m4,参数starrobot_m4.urdf即可。
如下图: