全部学习汇总: GreyZhang/g_TC275: happy hacking for TC275! (github.com)
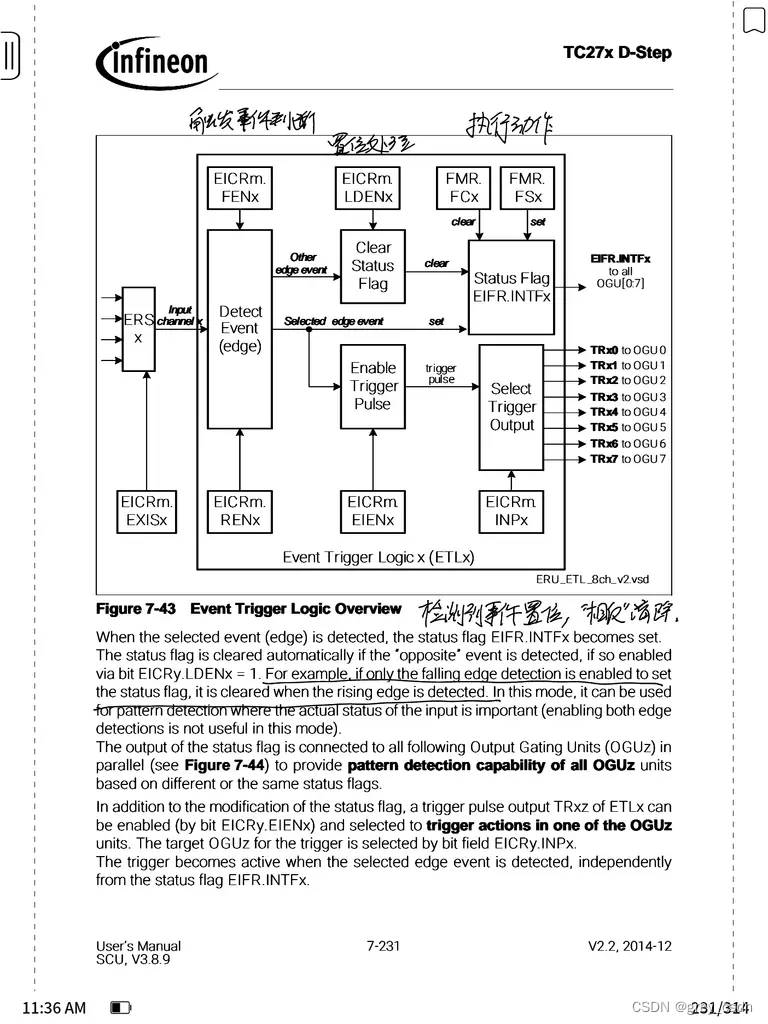
- 从系统的逻辑图看,能够很清楚看到这个模块的功能处理过程:首先是边沿信号的识别,接着是根据判断进行置位处理,最后进行工作触发。
- 如果设置的是单边沿检测,那么等“相反”边沿信号出现的时候,置位信息会被清除。比如,如果设置了上升沿触发,那么当出现了上升沿的时候会进行置位,之后的下降沿出现会让置位信息清除。
前面笔记整理的时候整理过一个知识点:一个输入信号可以触发多个动作,多个输入信号也可以输出同一个动作。而实现这个功能的模块,就是OGU。
- OGU进行输出的控制的时候有几种输出模式:原样子输出、根据信号的捕获结果输出一个布尔量的电平、触发某种动作、触发中断。
- 关于触发组合,最后一句话其实就是一个很好的总结。这个功能主要是实现多个请求源触发同一个动作的。
- 模式检查,不仅仅可以检查命中与否,还能够检查结果是否发生了变化。
- 触发机制的一个典型的用法就是触发ADC采集转换;
- 前面的模式检查中,有一个检查结果发生变化的一个判断。如何实现检查结果的判断呢?按理说,发生了之后,捕捉到了信号就是一个已经捕捉到了的一个状态了,那么通过什么信息来判断捕捉结果“无效”了呢?其实是通过一个时间窗的机制来实现的。
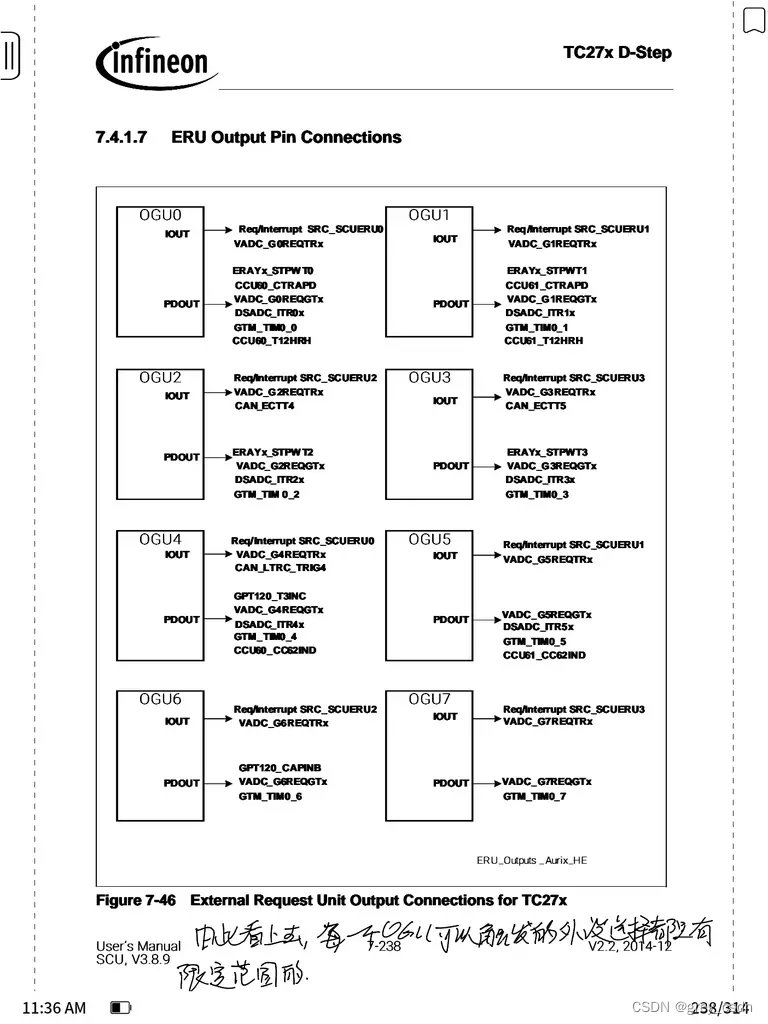
从这个图中看,其实每一个OGU模块的功能基本上是特定的。可以触发的外设选择都是有限定的。
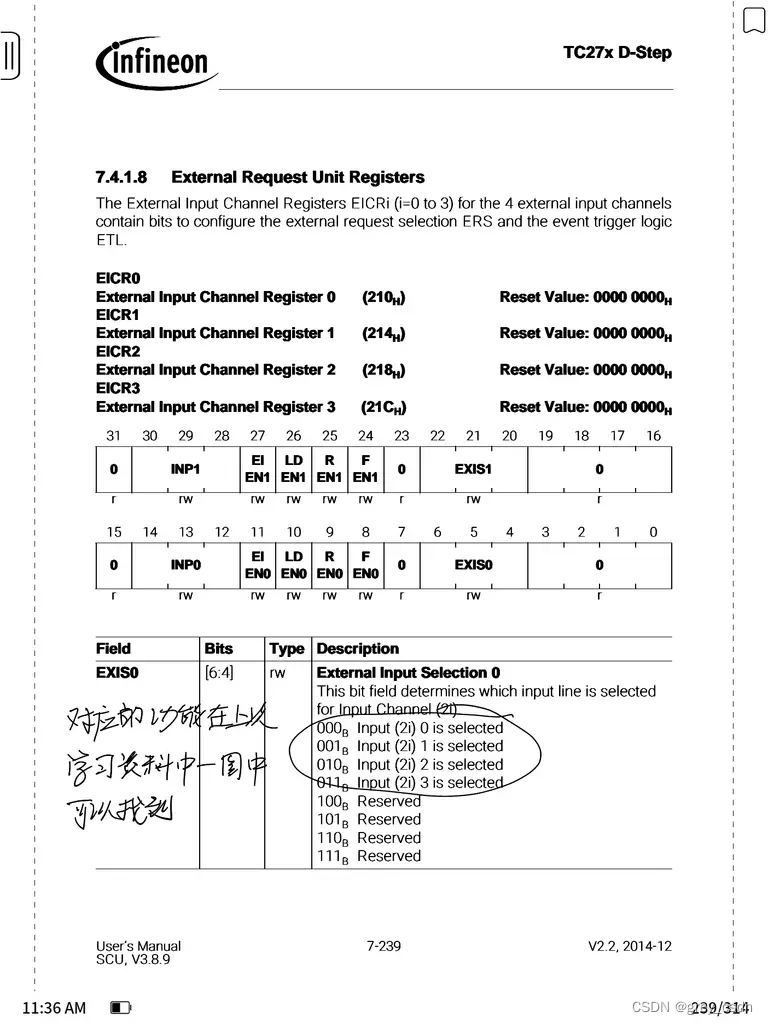
输入信号的选择,在上次的学习中是可以找到的,其实也有一个内容完善的图。
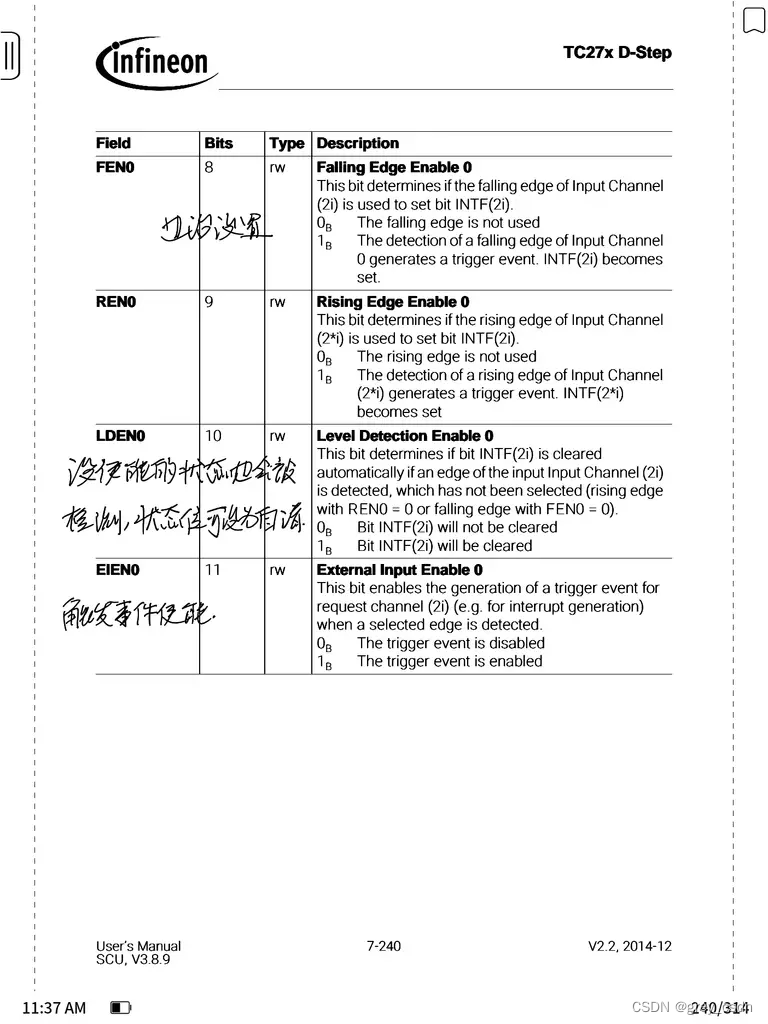
- 这里的FEN设置的是下降沿的检测,REM设置的是上升沿的检测。
- LDEN如果没有使能,边沿信号依然会被检测,但是状态位可以设置为自动清除。
- 最后一个bit设置的是触发事件的使能情况。

![【GO】 K8s 管理系统项目[API部分--Pod]](https://img-blog.csdnimg.cn/cc8f77562e8a4658809f8312c769b20a.png)




![[附源码]Nodejs计算机毕业设计基于的防疫隔离服务系统Express(程序+LW)](https://img-blog.csdnimg.cn/834cf3862717492abf3208e716247d6e.png)