随着汽车智能化的演进,传感器的堆叠造成了整车成本的急剧上升。尤其是多传感器融合(摄像头、毫米波雷达和激光雷达)技术作为当下的主流趋势之一,焦点依然回到成本层面。
同时,传统的整车电子架构和计算能力的限制,除摄像头(已经从传统的一体机模式演进到模组+域控制器架构)之外,毫米波雷达、激光雷达目前都是在传感器端实现数据的采集和处理(比如,主流基于FPGA的高速数据采集、预处理),并将目标结果反馈到域控制器。
此外,无论是激光雷达还是4D成像雷达,都需要对大量的点云进行处理,这不仅要求计算平台具备高性能、大吞吐量的特征,还对时延响应速度有很高的要求。同时,原始点云数据如果要直接传输至域控制器,还需要足够的带宽来支持。
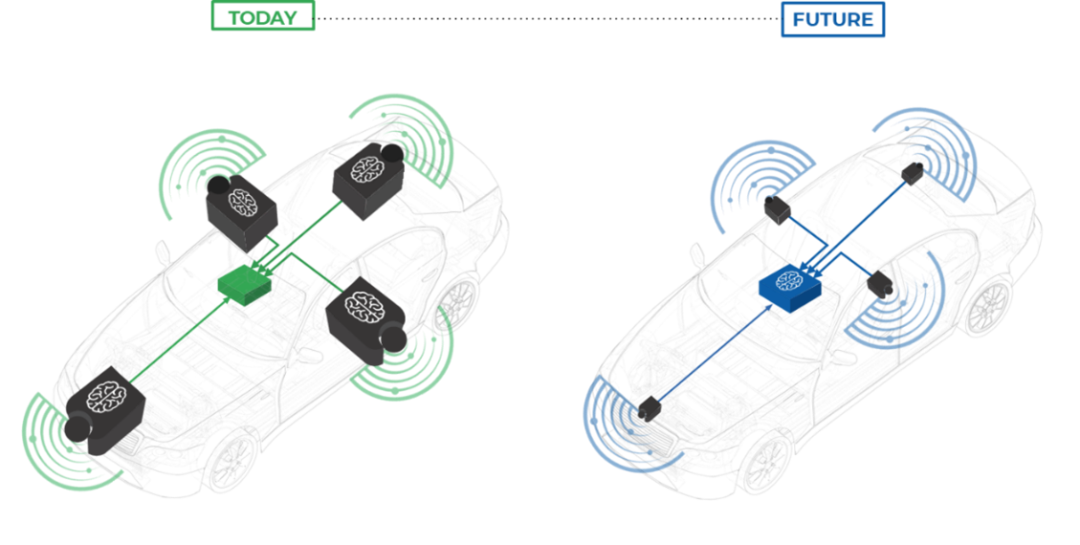
这意味着,对于现有的智能驾驶系统来说,传感器的增加,也带来了芯片使用量的同步增加。而对于未来的系统成本下降来说,传感器边缘计算处理架构升级到卫星式集中处理架构,成为选择项。
在这种架构下,中央计算单元能够处理各种毫米波雷达、摄像头和激光雷达,有可能显著降低决策复杂性和成本,同时基于Transformer的BEV模型,从多感知原始数据中提取更多有效信息,而在本地处理来自每个传感器的数据时,这些技术更难实现。
而对于传感器端来说,优势也非常明显:体积更小、结构设计更灵活、功耗更低,同时成本也更低。同时,基于类似MIPI A-PHY标准的高速连接解决方案(传输距离可达15米),其关键应用就是支持摄像头等图像传感器以及激光雷达、毫米波雷达的高速数据传输。
这其中,Valens公司进展最快,比如其与安波福的合作,在后者的智能车辆架构(SVA)平台中提供超高速车载连接解决方案。Valens的芯片组嵌入到SVA的PowerData Center (PDC)模块中,通过简化车内连接,并支持集中式和远程计算系统。
“通过降低汽车架构的复杂性,行业才能够继续应对功能丰富、高度自动化带来的快速增长的软硬件复杂性,比如,更多的传感器配置。”在业内人士看来,软硬解耦的关键,在于不断简化端侧的复杂性,将更多的处理能力集中到中央计算平台。
在安波福看来,传统汽车时代,数量不多的传感器被设计成独立数据处理输出,是符合现实需求的,同时可以适配不同平台、不同定位的车型。典型的代表,就是前视一体机方案。
然而,随着传感器数量的增加、功能的进阶,当下的传感器分布式处理架构意味着,独立开发和碎片化的软件算法功能部署和额外的芯片成本。
这也就诞生了今天的卫星式处理架构,将智能化从传感器中分离出来,并将其集中在一个强大的中央域控制器中,保留“卫星”传感器,其中仅包含数据采集(比如,毫米波雷达的收发器件)的必要硬件,而处理和决策则在域控制器中进行。
此外,由于域控制器不需要等待传感器的数据预处理,卫星式架构减少了延迟并加速了决策。同时,今天的摄像头、4D毫米波雷达、激光雷达,都需要建立在AI能力的基础上,统一的算法模型也有助于提升前融合的准确度。
这意味着,对于4D毫米波雷达、激光雷达来说,未来面临硬件分离的巨大机会和风险,同时也对中央计算平台的芯片架构设计和性能提出了更高的要求。
“4D成像雷达的创新与大规模量产,对于芯片的计算能力、可靠性、海量数据处理能力提出了更高的要求。”川速微波CEO王东峰指出,传统方案主要是依靠增加芯片、天线等硬件来实现。由于收发天线通道增多,理论上所采用的芯片数量也会更大,成本也会更高。
在这方面,川速微波已经开始率先求变。
该公司将毫米波雷达的信号处理模块进行了再分配,将各级的输出数据和算法在域控当中进行分配,利用域控芯片的超强算力,实现雷达点云成像功能。
“雷达算力集中做基础信号处理算法甚至只收集原始数据,而雷达信号及信息处理、AI算法在域控制器上运行,这不仅可以减少算力限制,还可以提升处理效果。”王东峰表示,4D成像雷达的信号处理技术和域控制器的硬件进行深度融合,将成为毫米波雷达降低系统成本的重要方式。
对于激光雷达来说,也是如此。
比如,已经有企业在研发分布式探头+集中式处理架构的激光雷达方案,通过将主机(算力部分可以进一步集中到域控制器)和探头分离的方式,通过光纤连接,多个探头可形成360°感知能力,同时多个探头共享一个激光源,减小探头体积的同时,能够灵活配置探头的位置和参数。
公开信息显示,禾赛科技也同样申请了分布式激光雷达的技术专利。包括:光收发组件,多个分布式扫描单元以及分布式光纤连接组件。分布式扫描单元共用一套激光发射器和激光探测器以及相关的电子部件。通过分布式扫描单元的排列组合,解决目前多激光雷达耦合时成本较高、体积较大的问题。
同时,相比于视觉处理感知软件和方案的普遍,激光雷达面临着后处理感知软件稀缺、开发难度较高的挑战,尤其点云数据是3D数据,对其处理需要更高的算力。
这意味着,域控制器的集中化处理成为可选项之一。同时,软硬解耦的趋势,也在影响传感器的架构设计,一旦实现标准化的点云处理软件开发,就可以实现即插即用,极大缩短了系统的整个开发周期。
比如,福瑞泰克就在开发动态可插拔的激光雷达感知算法,以应对其高成本和低鲁棒性的短板。同时,越来越多的激光雷达厂商也在与上游SoC厂商合作,实现感知算法的快速迁移。
而卫星式传感器架构的设计,也对MCU提出了更高的要求。目前,行业头部企业都在研发和陆续交付具备高算力、硬件虚拟化技术的下一代MCU(也被称为MPU,增加A核的数量),从而能够满足智能驾驶功能所需的多种类型传感器的大量数据处理。
![[附源码]Node.js计算机毕业设计高校图书馆网站Express](https://img-blog.csdnimg.cn/75623f7512784307ac1d310e7512ad04.png)