文章目录
- 前言
- 一、引入Modbus模块
- 二、Modbus设备的连接
- 三、各寄存器数据的读取
- 四、各寄存器数据的写入
- 五、示例完整代码
- 总结
前言
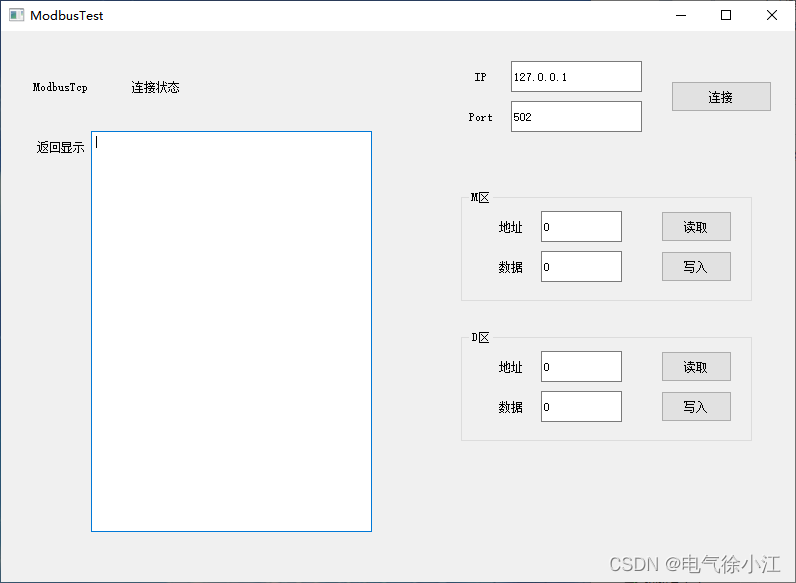
本文主要讲述了使用Qt的Modbus模块来进行ModbusTcp的通信,实现对PLC的线圈寄存器和保持寄存器的读写,基于TCP/IP的Modbus协议的内容我就不做过多解释了,详见参考文章。在本文示例中采用QModbusTcpClient类作为Modbus客户端(主站),PLC作为从站,封装了一个自己的MyModbus类,希望可以帮助到大家,如有错误之处,欢迎大家批评指正。
项目效果
提示:以下是本篇文章正文内容,下面案例可供参考
一、引入Modbus模块
1.这里我实现了自己的MyModbus类的封装,使用了pri子模块的方式,也是方便日后进行此模块的复用
pri中引入Modbus模块:
MyModbus.pri
QT += serialbus serialport
MyModbus类中添加相关头文件
#include <QModbusTcpClient>
#include <QModbusDataUnit>
二、Modbus设备的连接
1.ModbusTcp的连接只需要配置好连接参数IP+Port
//判断当前连接状态是否为断开状态
if(myClient->state() != QModbusDevice::ConnectedState)
{
//配置ModbusTcp的连接参数IP+Port
myClient->setConnectionParameter(QModbusDevice::NetworkAddressParameter,ip);
myClient->setConnectionParameter(QModbusDevice::NetworkPortParameter,port);
myClient->connectDevice();
}
三、各寄存器数据的读取
1.Modbus中有4种操作对象,这4种都能进行读取操作:线圈、离散输入、保持寄存器、输入寄存器
//读取modbus设备各寄存器数据
//typeNum:1_线圈 2_离散输入 3_保持 4_输入
bool MyModbus::readModbusData(int typeNum,int startAdd,quint16 numbers)
{
if(myClient->state() != QModbusDevice::ConnectedState)
{
return false;
}
//确定寄存器类型
QModbusDataUnit ReadUnit;
if(typeNum == 1)
{
ReadUnit = QModbusDataUnit(QModbusDataUnit::Coils,startAdd,numbers);
}
else if(typeNum == 2)
{
ReadUnit = QModbusDataUnit(QModbusDataUnit::DiscreteInputs,startAdd,numbers);
}
else if(typeNum == 3)
{
ReadUnit = QModbusDataUnit(QModbusDataUnit::HoldingRegisters,startAdd,numbers);
}
else if(typeNum == 4)
{
ReadUnit = QModbusDataUnit(QModbusDataUnit::InputRegisters,startAdd,numbers);
}
else
{
LOGDEBUG<<"读取寄存器类型错误";
return false;
}
LOGDEBUG<<"readModbusData typeNum:"<<typeNum;
//多读
if(auto *reply = myClient->sendReadRequest(ReadUnit,1))
{
if(!reply->isFinished())
{
if((typeNum == 1) || (typeNum == 2))
{
QObject::connect(reply,&QModbusReply::finished,this,&MyModbus::slot_readReadyCoils); //读取线圈
}
if((typeNum == 3) || (typeNum == 4))
{
QObject::connect(reply,&QModbusReply::finished,this,&MyModbus::slot_readReadyRegisters); //读取寄存器
}
//reply->deleteLater();
return true;
}
else
{
reply->deleteLater();
return false;
}
}
else
{
LOGDEBUG<<"读取错误:" + myClient->errorString();
return false;
}
}
四、各寄存器数据的写入
1.Modbus中4种操作对象只有这2种能进行写入操作:线圈 、保持寄存器
//对modbus设备各寄存器写入数据
//typeNum:1_线圈 2_保持 (这两类寄存器可读可写,其余的只读)
bool MyModbus::writeModbusData(int typeNum,int startAdd,int writeNum)
{
if(myClient->state() != QModbusDevice::ConnectedState)
{
return false;
}
//确定寄存器类型
QModbusDataUnit writeUnit;
if(typeNum == 1)
{
writeUnit = QModbusDataUnit(QModbusDataUnit::Coils,startAdd,1); //写入一个数据
writeUnit.setValue(0,writeNum);
//单写
//bool ok;
//quint16 hexData = writeData.toInt(&ok,16); //转16进制
}
else if(typeNum == 2)
{
writeUnit = QModbusDataUnit(QModbusDataUnit::HoldingRegisters,startAdd,2); //写入两个数据
quint16 uData16[2] = {0};
uData16[0] = writeNum & 0xffff;
uData16[1] = (writeNum >> 16) & 0xffff;
writeUnit.setValue(0,uData16[0]);
writeUnit.setValue(1,uData16[1]);
//LOGDEBUG<<"uData16[0]:"<<uData16[0]<<" uData16[1]:"<<uData16[1]<<" writeNum:"<<writeNum;
}
else
{
LOGDEBUG<<"写入寄存器类型错误";
return false;
}
//LOGDEBUG<<"writeModbusData typeNum:"<<typeNum<<" writeNum:"<<writeNum;
if(auto *reply = myClient->sendWriteRequest(writeUnit,1))
{
if(!reply->isFinished())
{
connect(reply,&QModbusReply::finished,this,[reply]()
{
if(reply->error() == QModbusDevice::NoError)
{
reply->deleteLater();
return true;
}
else
{
LOGDEBUG<<"写入返回错误:"<<reply->error();
reply->deleteLater();
return false;
}
});
}
else
{
reply->deleteLater();
return false;
}
}
else
{
LOGDEBUG<<"写入错误:" + myClient->errorString();
return false;
}
return true;
}
五、示例完整代码
这里是示例项目的完整代码,包含pro主程序和MyModbus.pri子文件
1.ModbusTest.pro
QT += core gui
greaterThan(QT_MAJOR_VERSION, 4): QT += widgets
CONFIG += c++11
#定义编译选项.QT_DEPRECATED_WARNINGS表示当Qt的某些功能被标记为过时的,那么编译器会发出警告.
DEFINES += QT_DEPRECATED_WARNINGS
#设置字符(MSCV编译器下防止中文乱码)
contains( CONFIG,"msvc" ):QMAKE_CXXFLAGS += /source-charset:utf-8 /execution-charset:utf-8
contains( CONFIG,"msvc" ):QMAKE_CFLAGS +=/source-charset:utf-8 /execution-charset:utf-8
include (./MyModbus/MyModbus.pri)
SOURCES += \
main.cpp \
widget.cpp
HEADERS += \
widget.h
FORMS += \
widget.ui
# Default rules for deployment.
qnx: target.path = /tmp/$${TARGET}/bin
else: unix:!android: target.path = /opt/$${TARGET}/bin
!isEmpty(target.path): INSTALLS += target
2.MyModbus.pri
QT += serialbus serialport
HEADERS += \
$$PWD/mymodbus.h
SOURCES += \
$$PWD/mymodbus.cpp
3.mymodbus.h
#ifndef MYMODBUS_H
#define MYMODBUS_H
#include <QObject>
#include <QModbusTcpClient>
#include <QModbusDataUnit>
#include <QDebug>
#define LOGDEBUG qDebug()<<__FILE__<<__LINE__
class MyModbus : public QObject
{
Q_OBJECT
public:
explicit MyModbus(QObject *parent = nullptr);
~MyModbus();
void initModbus();
void connectToModbus(QString ip,int port);
bool readModbusData(int typeNum,int startAdd,quint16 numbers);
bool writeModbusData(int typeNum,int startAdd,int writeNum);
signals:
void signal_stateChanged(bool flag);
void signal_readCoils(QVector<quint16> vAllData);
void signal_readRegisters(int resultNum);
private slots:
void slot_stateChanged();
void slot_readReadyCoils();
void slot_readReadyRegisters();
private:
QModbusTcpClient *myClient;
};
#endif // MYMODBUS_H
4.mymodbus.cpp
#include "mymodbus.h"
MyModbus::MyModbus(QObject *parent) : QObject(parent)
{
this->initModbus();
}
MyModbus::~MyModbus()
{
}
//初始化
void MyModbus::initModbus()
{
myClient = new QModbusTcpClient();
//connect(myClient,SIGNAL(stateChanged()),this,SLOT(slot_stateChanged()));
connect(myClient,&QModbusClient::stateChanged,this,&MyModbus::slot_stateChanged);
}
//连接到modbus设备
void MyModbus::connectToModbus(QString ip,int port)
{
if(!myClient)
{
return;
}
//判断当前连接状态是否为断开状态
if(myClient->state() != QModbusDevice::ConnectedState)
{
//配置ModbusTcp的连接参数IP+Port
myClient->setConnectionParameter(QModbusDevice::NetworkAddressParameter,ip);
myClient->setConnectionParameter(QModbusDevice::NetworkPortParameter,port);
myClient->connectDevice();
}
//else
//{
// myClient->disconnectDevice();
//}
}
//读取modbus设备各寄存器数据
//typeNum:1_线圈 2_离散输入 3_保持 4_输入
bool MyModbus::readModbusData(int typeNum,int startAdd,quint16 numbers)
{
if(myClient->state() != QModbusDevice::ConnectedState)
{
return false;
}
//确定寄存器类型
QModbusDataUnit ReadUnit;
if(typeNum == 1)
{
ReadUnit = QModbusDataUnit(QModbusDataUnit::Coils,startAdd,numbers);
}
else if(typeNum == 2)
{
ReadUnit = QModbusDataUnit(QModbusDataUnit::DiscreteInputs,startAdd,numbers);
}
else if(typeNum == 3)
{
ReadUnit = QModbusDataUnit(QModbusDataUnit::HoldingRegisters,startAdd,numbers);
}
else if(typeNum == 4)
{
ReadUnit = QModbusDataUnit(QModbusDataUnit::InputRegisters,startAdd,numbers);
}
else
{
LOGDEBUG<<"读取寄存器类型错误";
return false;
}
LOGDEBUG<<"readModbusData typeNum:"<<typeNum;
//多读
if(auto *reply = myClient->sendReadRequest(ReadUnit,1))
{
if(!reply->isFinished())
{
if((typeNum == 1) || (typeNum == 2))
{
QObject::connect(reply,&QModbusReply::finished,this,&MyModbus::slot_readReadyCoils); //读取线圈
}
if((typeNum == 3) || (typeNum == 4))
{
QObject::connect(reply,&QModbusReply::finished,this,&MyModbus::slot_readReadyRegisters); //读取寄存器
}
//reply->deleteLater();
return true;
}
else
{
reply->deleteLater();
return false;
}
}
else
{
LOGDEBUG<<"读取错误:" + myClient->errorString();
return false;
}
}
//对modbus设备各寄存器写入数据
//typeNum:1_线圈 2_保持 (这两类寄存器可读可写,其余的只读)
bool MyModbus::writeModbusData(int typeNum,int startAdd,int writeNum)
{
if(myClient->state() != QModbusDevice::ConnectedState)
{
return false;
}
//确定寄存器类型
QModbusDataUnit writeUnit;
if(typeNum == 1)
{
writeUnit = QModbusDataUnit(QModbusDataUnit::Coils,startAdd,1); //写入一个数据
writeUnit.setValue(0,writeNum);
//单写
//bool ok;
//quint16 hexData = writeData.toInt(&ok,16); //转16进制
}
else if(typeNum == 2)
{
writeUnit = QModbusDataUnit(QModbusDataUnit::HoldingRegisters,startAdd,2); //写入两个数据
quint16 uData16[2] = {0};
uData16[0] = writeNum & 0xffff;
uData16[1] = (writeNum >> 16) & 0xffff;
writeUnit.setValue(0,uData16[0]);
writeUnit.setValue(1,uData16[1]);
//LOGDEBUG<<"uData16[0]:"<<uData16[0]<<" uData16[1]:"<<uData16[1]<<" writeNum:"<<writeNum;
}
else
{
LOGDEBUG<<"写入寄存器类型错误";
return false;
}
//LOGDEBUG<<"writeModbusData typeNum:"<<typeNum<<" writeNum:"<<writeNum;
if(auto *reply = myClient->sendWriteRequest(writeUnit,1))
{
if(!reply->isFinished())
{
connect(reply,&QModbusReply::finished,this,[reply]()
{
if(reply->error() == QModbusDevice::NoError)
{
reply->deleteLater();
return true;
}
else
{
LOGDEBUG<<"写入返回错误:"<<reply->error();
reply->deleteLater();
return false;
}
});
}
else
{
reply->deleteLater();
return false;
}
}
else
{
LOGDEBUG<<"写入错误:" + myClient->errorString();
return false;
}
return true;
}
//监听TCP连接的状态,若状态发生改变,发出对应的信号
void MyModbus::slot_stateChanged()
{
LOGDEBUG<<myClient->state();
if(myClient->state() == QModbusDevice::ConnectedState)
{
emit signal_stateChanged(true);
}
else if(myClient->state() == QModbusDevice::UnconnectedState)
{
emit signal_stateChanged(false);
}
}
//接收到读取线圈/离散输入寄存器请求后执行的槽函数
void MyModbus::slot_readReadyCoils()
{
QVector<quint16> vAllData;
QModbusReply *reply = qobject_cast<QModbusReply *>(sender());
if(!reply)
{
LOGDEBUG<<"读取线圈/离散输入寄存器错误";
return;
}
if(reply->error() == QModbusDevice::NoError)
{
const QModbusDataUnit unit = reply->result();
vAllData = unit.values();
emit signal_readCoils(vAllData);
}
else
{
LOGDEBUG<<"线圈/离散输入寄存器回复错误:"<<reply->error();
}
reply->deleteLater();
}
//接收到读取保持/输入寄存器请求后执行的槽函数
void MyModbus::slot_readReadyRegisters()
{
QModbusReply *reply = qobject_cast<QModbusReply *>(sender());
if(!reply)
{
LOGDEBUG<<"读取保持/输入寄存器错误";
return;
}
if(reply->error() == QModbusDevice::NoError)
{
const QModbusDataUnit unit = reply->result();
auto valueList = unit.values();
int nSize = valueList.size();
if(nSize == 2)
{
quint16 uData16[2] = {0};
uData16[0] = valueList[0];
uData16[1] = valueList[1];
int resultNum = uData16[0] | (uData16[1] << 16);
//LOGDEBUG<<"uData16[0]:"<<uData16[0]<<" uData16[1]:"<<uData16[1]<<" resultNum:"<<resultNum;
emit signal_readRegisters(resultNum);
}
else
{
LOGDEBUG<<"保持寄存器返回数据错误,个数:"<<nSize;
}
}
else
{
LOGDEBUG<<"保持/输入寄存器回复错误:"<<reply->error();
}
reply->deleteLater();
}
/*
//读取保持/输入寄存器数据的另一种方式,已废弃
//当前数据格式为大端模式,高位存低地址
//判断正负数,以高8位的16进制是否为f判断
int resultNum = 0;
if(QString::number(valueList[1],16).left(1) == "f") //负数
{
//判断是否小于-65535,高16位的10进制为65535
if(valueList[1] == 65535)
{
resultNum = valueList[0] - 65536;
}
else
{
resultNum = (valueList[1] - 65535) * 65536 + (valueList[0] - 65536);
}
}
else
{
//判断是否大于65535,高16位的10进制大于0
if(valueList[1] > 0)
{
resultNum = valueList[1] * 65536 + valueList[0];
}
else
{
resultNum = valueList[0];
}
}
*/
5.widget.h
#ifndef WIDGET_H
#define WIDGET_H
#include <QWidget>
#include <QFileDialog>
#include <QDateTime>
#include <QMessageBox>
#include "MyModbus/mymodbus.h"
QT_BEGIN_NAMESPACE
namespace Ui { class Widget; }
QT_END_NAMESPACE
class Widget : public QWidget
{
Q_OBJECT
public:
Widget(QWidget *parent = nullptr);
~Widget();
void initWidget();
private slots:
void slot_stateChanged(bool flag);
void slot_readCoils(QVector<quint16> vAllData);
void slot_readRegisters(int resultNum);
private slots:
void on_pb_connect_clicked();
void on_pb_readM_clicked();
void on_pb_writeM_clicked();
void on_pb_readD_clicked();
void on_pb_writeD_clicked();
private:
Ui::Widget *ui;
MyModbus *m_myModsbus; //MyModbus对象
};
#endif // WIDGET_H
6.widget.cpp
#include "widget.h"
#include "ui_widget.h"
Widget::Widget(QWidget *parent)
: QWidget(parent)
, ui(new Ui::Widget)
{
ui->setupUi(this);
this->initWidget();
}
Widget::~Widget()
{
delete ui;
}
void Widget::initWidget()
{
//初始化MyModbus对象
m_myModsbus = new MyModbus();
connect(m_myModsbus,SIGNAL(signal_stateChanged(bool)),this,SLOT(slot_stateChanged(bool)));
connect(m_myModsbus,SIGNAL(signal_readCoils(QVector<quint16>)),this,SLOT(slot_readCoils(QVector<quint16>)));
connect(m_myModsbus,SIGNAL(signal_readRegisters(int)),this,SLOT(slot_readRegisters(int)));
}
void Widget::slot_stateChanged(bool flag)
{
if(flag)
{
ui->lb_state->setText("连接成功");
ui->te_show->appendPlainText(QTime::currentTime().toString("hh:mm:ss: ") + "连接成功");
QMessageBox::warning(this,"警告","连接成功!");
}
else
{
ui->lb_state->setText("连接断开");
ui->te_show->appendPlainText(QTime::currentTime().toString("hh:mm:ss: ") + "连接断开");
QMessageBox::warning(this,"警告","连接断开!");
}
}
void Widget::slot_readCoils(QVector<quint16> vAllData)
{
LOGDEBUG<<"readCoils size:"<<vAllData.size();
for(int i=0;i<vAllData.size();i++)
{
LOGDEBUG<<"i:"<<vAllData[i];
ui->te_show->appendPlainText(QTime::currentTime().toString("hh:mm:ss: ") + "读取M区返回数据:" + QString::number(vAllData[i]));
ui->le_dataM->setText(QString::number(vAllData[0]));
}
}
void Widget::slot_readRegisters(int resultNum)
{
LOGDEBUG<<"resultNum:"<<resultNum;
ui->te_show->appendPlainText(QTime::currentTime().toString("hh:mm:ss: ") + "读取D区返回数据:" + QString::number(resultNum));
ui->le_dataD->setText(QString::number(resultNum));
}
void Widget::on_pb_connect_clicked()
{
QString ip = ui->le_ip->text();
int port = ui->le_port->text().toInt();
LOGDEBUG<<"ip:"<<ip<<" port:"<<port;
ui->te_show->appendPlainText(QTime::currentTime().toString("hh:mm:ss: ") + "ip:" + ip + " port:" + QString::number(port));
//连接到modbus设备
m_myModsbus->connectToModbus(ip,port);
}
void Widget::on_pb_readM_clicked()
{
int startAdd = ui->le_addressM->text().toInt();
LOGDEBUG<<"startAdd:"<<startAdd;
if(!m_myModsbus->readModbusData(1,startAdd,1))
{
QMessageBox::warning(this,"警告","M区数据读取失败!");
}
}
void Widget::on_pb_writeM_clicked()
{
int startAdd = ui->le_addressM->text().toInt();
int writeNum = ui->le_dataM->text().toInt();
LOGDEBUG<<"startAdd:"<<startAdd<<" writeNum:"<<writeNum;
//单写
if(!m_myModsbus->writeModbusData(1,startAdd,writeNum))
{
QMessageBox::warning(this,"警告","M区数据写入失败!");
}
}
void Widget::on_pb_readD_clicked()
{
int startAdd = ui->le_addressD->text().toInt();
LOGDEBUG<<"startAdd:"<<startAdd;
if(!m_myModsbus->readModbusData(3,startAdd,2))
{
QMessageBox::warning(this,"警告","D区数据读取失败!");
}
}
void Widget::on_pb_writeD_clicked()
{
int startAdd = ui->le_addressD->text().toInt();
int writeNum = ui->le_dataD->text().toInt();;
LOGDEBUG<<"startAdd:"<<startAdd<<" writeNum:"<<writeNum;
//进行写入寄存器数据的处理
if(!m_myModsbus->writeModbusData(2,startAdd,writeNum))
{
QMessageBox::warning(this,"警告","D区数据写入失败!");
}
}
7.main.cpp
#include "widget.h"
#include <QApplication>
#include <QMutex>
//程序输出日志
void outputMessage(QtMsgType type,const QMessageLogContext &context,const QString &msg)
{
static QMutex mutex;
mutex.lock();
//初始化log文件夹
QString logFilePath = QCoreApplication::applicationDirPath() + "/LogFile/";
QDir dstDir(logFilePath);
if(!dstDir.exists())
{
if(!dstDir.mkpath(logFilePath))
{
LOGDEBUG<<"程序输出日志创建失败!";
}
else
{
LOGDEBUG<<"程序输出日志创建成功!";
}
}
//获取输出内容
QString debugMsg;
if(type == QtDebugMsg)
{
QString debugDateTime = QDateTime::currentDateTime().toString("yyyy-MM-dd hh:mm:ss");
debugMsg = QString("%1\n%2%3").arg(debugDateTime).arg(msg).arg(context.function);
}
//保存文件
QString curDate = QDate::currentDate().toString("yyyyMMdd");
QString logFile = logFilePath + "log_" + curDate + ".txt";
QFile file(logFile);
file.open(QIODevice::WriteOnly | QIODevice::Append);
QTextStream textStream(&file);
textStream << debugMsg << "\n\n";
file.flush();
file.close();
mutex.unlock();
}
int main(int argc, char *argv[])
{
QApplication a(argc, argv);
qInstallMessageHandler(outputMessage);
Widget w;
w.show();
return a.exec();
}
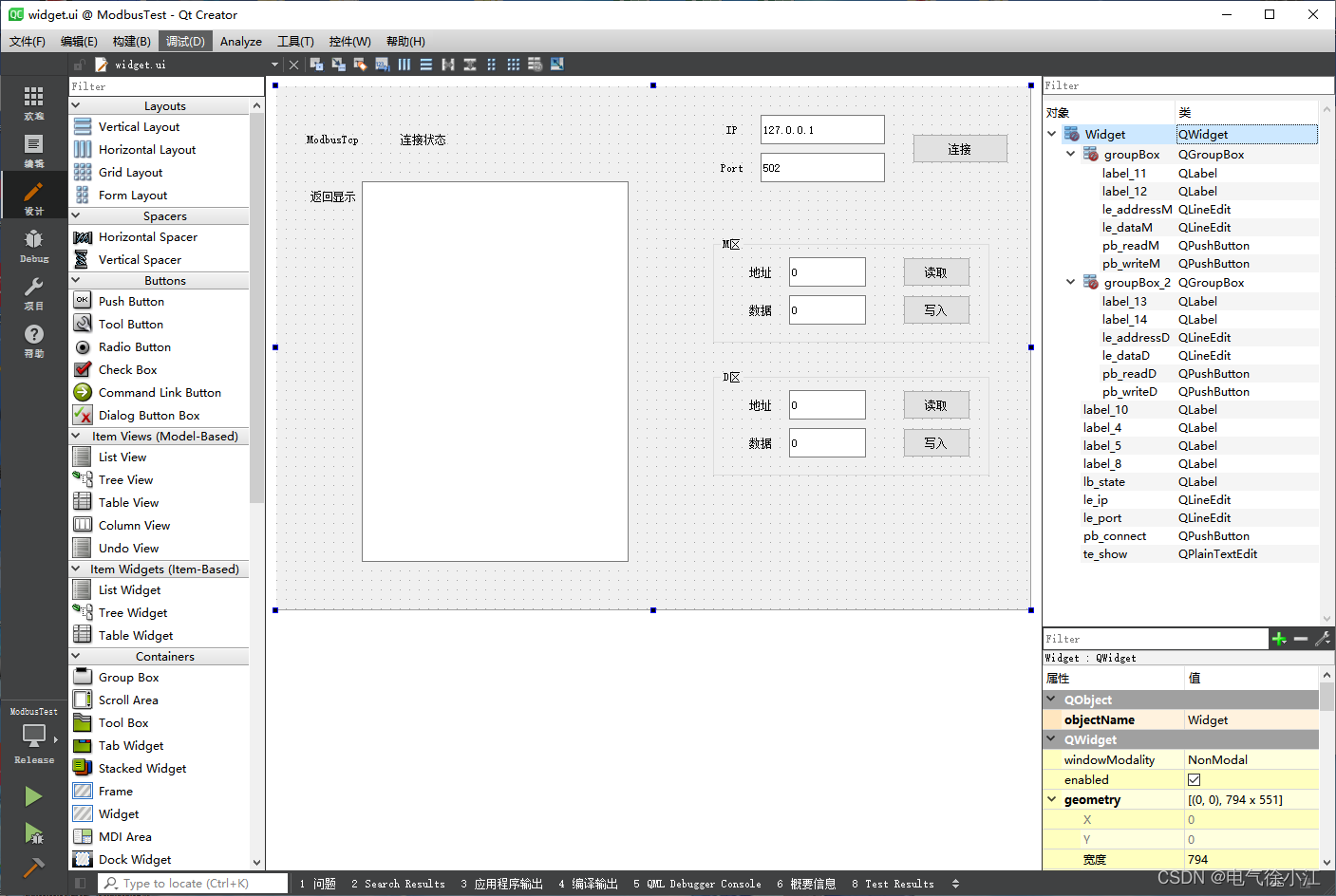
8.widget.ui
总结
基于Qt使用这个ModbusTcp协议进行通信,还是比较简单的,首先就是确定下寄存器的类型,直接使用相关的函数进行读写。需要注意的一点是在进行保持寄存器读写的时候,我们PLC某个地址上的数是个16位的数,所以在进行32位有符号数读写的时候,要考虑两个相邻地址的组合,文中就对此进行了处理,这种情况下PLC那边也别忘记进行相应的设置哈。
hello:
共同学习,共同进步,如果还有相关问题,可在评论区留言进行讨论。
参考博客:
QT下的Modbus TCP 通讯
C++与PLC通过Modbus TCP协议进行PLC内部寄存器的值的读取/写入总结