文章目录
- 一、串口通信
- 二、UART通信
- 三、tx发送模块
- 四、rx模块接收
一、串口通信
处理器与外部设备通信的两种方式:
串行通信: 指数据的各个位使用多条数据线同时进行传输。
并行通信: 将数据分成一位一位的形式在一条数据线上逐个传输。

串行通信的通信方式:
同步通信: 带时钟同步信号的数据传输,发送方和接收方在同一时钟控制下,同步传输数据。
异步通信: 不带时钟同步信号的数据传输,发送方和接收方使用各自的时钟控制数据的发送和接收过程。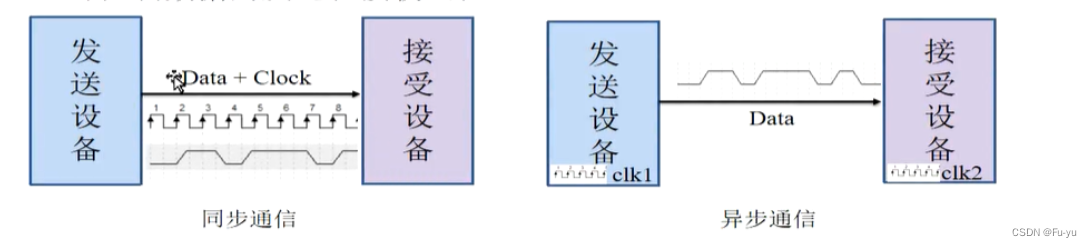
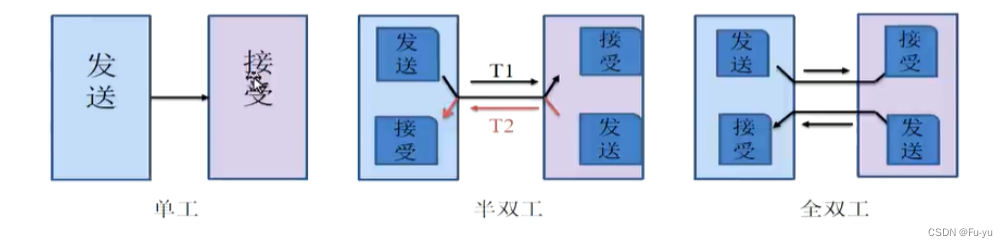
串行通信的传输方向:
单工: 数据只能沿一个方向进行传输。
半双工: 数据传输可以沿两个方向,但需要分时进行。
全双工: 数据可以同时进行双向传输。
常见的串行通信接口:
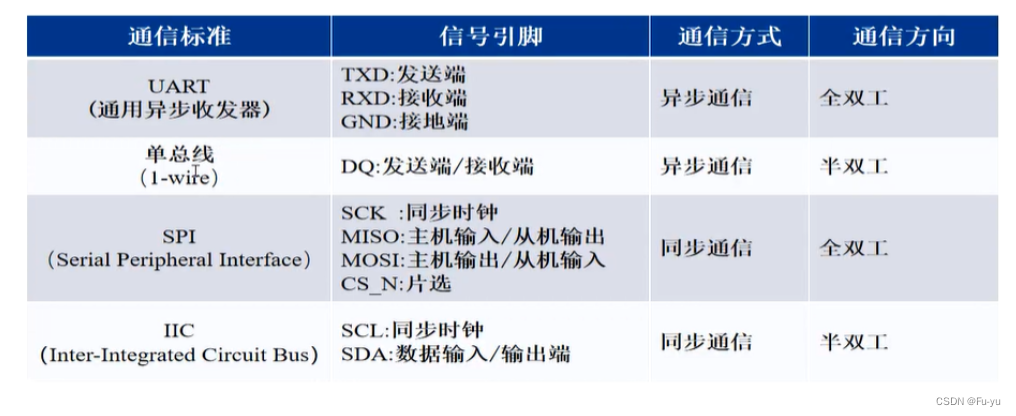
二、UART通信
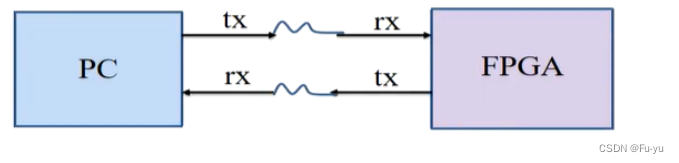
通用异步收发传输器(Universal Asynchronous Receiver/Transmitter),通常称作UART,是一种异步收发传输器。 它在发送数据时将并行数据转换为串行的数据来传输,在接收数据时将接收到的串行数据转换成并行数据。UART串口通信需要两根信号线来实现,一根用于发送,另一个用于接收。
协议层:
数据格式,1帧数据由4部分组成。
- 起始位(1bit)
- 数据位(6/7/8bit)
- 奇偶校验位(1bit)
- 停止位(1bit/1.5bit/2bit)
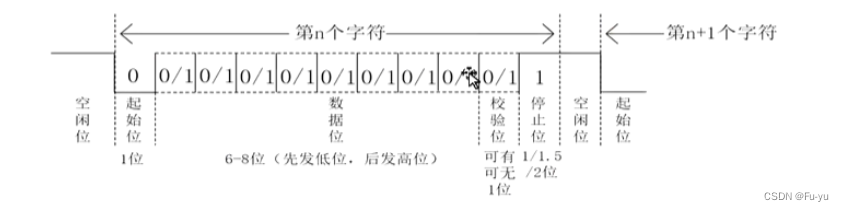
奇校验:原始码流+校验位 总共有奇数个1
偶校验:原始码流+校验位 总共有偶数个1
传输速率:
串口通信速率用波特率表示,它表示每秒传输二进制数据的位数,单位是bit/s(位/秒),简称bps;常用的波特率有9600,115200等。
物理层:
串口电平标准:
- TTL电平的串口(3.3V)
- RS232电平的串口(+5V ~ +12V为低电平,-12V ~ -5V为高电平)
三、tx发送模块
tx发送模块:共四个状态,IDLE状态,START状态,DATA状态,FINISH状态。
/*
* @Description: tx输出,波特率115200,系统时钟50M,传输1bit所需计数434个周期
* @Author: Fu Yu
* @Date: 2023-08-15 11:10:41
* @LastEditTime: 2023-08-15 14:55:04
* @LastEditors: Fu Yu
*/
module uart_tx (
input wire clk ,
input wire rst_n ,
input wire [7:0] tx_din ,
input wire tx_din_vld ,
output wire tx_dout ,
output wire ready
);
parameter MAX_BIT = 50_000_000/115200;//1bit计数最大值,434
localparam IDLE = 4'b0001,
START = 4'b0010,
DATA = 4'b0100,
FINISH = 4'b1000;
reg [3:0] state_c;//现态
reg [3:0] state_n;//次态
wire idle_start ;// IDLE -> START
wire start_data ;// START -> DATA
wire data_finish ;// DATA -> FINISH
wire finish_idle ;// FINFISH -> IDLE
reg [8:0] cnt_bit ;
wire add_cnt_bit ;
wire end_cnt_bit ;
reg [11:0] cnt_data ;
wire add_cnt_data ;
wire end_cnt_data ;
reg [7:0] tx_din_r;
reg tx_dout_r;
//****************************************************************
//-- 状态机
//****************************************************************
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
state_c <= IDLE;
end
else begin
state_c <= state_n;
end
end
always @( *) begin
case (state_c)
IDLE : begin
if(idle_start) begin
state_n = START;
end
else begin
state_n = state_c;
end
end
START : begin
if(start_data) begin
state_n = DATA;
end
else begin
state_n = state_c;
end
end
DATA : begin
if(data_finish) begin
state_n = FINISH;
end
else begin
state_n = state_c;
end
end
FINISH : begin
if(finish_idle) begin
state_n = IDLE;
end
else begin
state_n = state_c;
end
end
default : state_n = IDLE;
endcase
end
assign idle_start = state_c == IDLE && tx_din_vld ;
assign start_data = state_c == START && end_cnt_bit;
assign data_finish = state_c == DATA && end_cnt_data;
assign finish_idle = state_c == FINISH && end_cnt_bit;
//****************************************************************
//-- 计数器
//****************************************************************
//1bit计数器
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
cnt_bit <= 'd0;
end
else if(add_cnt_bit)begin
if(end_cnt_bit)begin
cnt_bit <= 'd0;
end
else begin
cnt_bit <= cnt_bit + 1'b1;
end
end
end
assign add_cnt_bit = state_c == START || state_c == FINISH || state_c == DATA;
assign end_cnt_bit = add_cnt_bit && cnt_bit == MAX_BIT - 1;
//8bit计数器
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
cnt_data <= 'd0;
end
else if(add_cnt_data)begin
if(end_cnt_data)begin
cnt_data <= 'd0;
end
else begin
cnt_data <= cnt_data + 1'b1;
end
end
end
assign add_cnt_data = state_c == DATA && end_cnt_bit;
assign end_cnt_data = add_cnt_data && cnt_data == 8 - 1 ;
//****************************************************************
//-- 输入数据寄存
//****************************************************************
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
tx_din_r <= 0;
end
else begin
tx_din_r <= tx_din;
end
end
//****************************************************************
//-- 实现串口时序
//****************************************************************
always @( *) begin
case (state_c)
IDLE : begin
tx_dout_r = 1;
end
START : begin
tx_dout_r = 0;
end
DATA : begin
if(tx_din_r[cnt_data]) begin
tx_dout_r = 1;
end
else begin
tx_dout_r = 0;
end
end
FINISH : begin
tx_dout_r = 1;
end
default : tx_dout_r = 1;
endcase
end
assign tx_dout = tx_dout_r;
assign ready = state_c == IDLE;
endmodule //uart_tx
测试文件:
/*
* @Description: uart_tx仿真模块
* @Author: Fu Yu
* @Date: 2023-08-15 14:58:32
* @LastEditTime: 2023-08-15 15:06:49
* @LastEditors: Fu Yu
*/
`timescale 1ns/1ns
module tb_uart_tx();
//激励信号定义
reg tb_clk ;
reg tb_rst_n ;
reg [7:0] tb_tx_din ;
reg tb_tx_din_vld;
//输出信号定义
wire tx_dout ;
wire ready ;
//时钟周期参数定义
parameter CLOCK_CYCLE = 20;
defparam u_uart_tx.MAX_BIT = 10;
//模块例化
uart_tx u_uart_tx(
/*input wire */ . clk (tb_clk) ,
/*input wire */ . rst_n (tb_rst_n) ,
/*input wire [7:0] */ . tx_din (tb_tx_din) ,
/*input wire */ . tx_din_vld(tb_tx_din_vld) ,
/*output wire */ . tx_dout (tx_dout) ,
/*output wire */ . ready (ready)
);
//产生时钟
initial tb_clk = 1'b0;
always #(CLOCK_CYCLE/2) tb_clk = ~tb_clk;
//产生激励
initial begin
tb_rst_n = 1'b1;
tb_tx_din = 0;
tb_tx_din_vld = 0;
#(CLOCK_CYCLE*2);
tb_rst_n = 1'b0;
#(CLOCK_CYCLE*20);
tb_rst_n = 1'b1;
repeat(10) begin
tb_tx_din_vld = 1;
tb_tx_din = {$random};
#20;
tb_tx_din_vld = 0;
wait(ready == 1);
#20;
end
#1000;
$stop;
end
endmodule
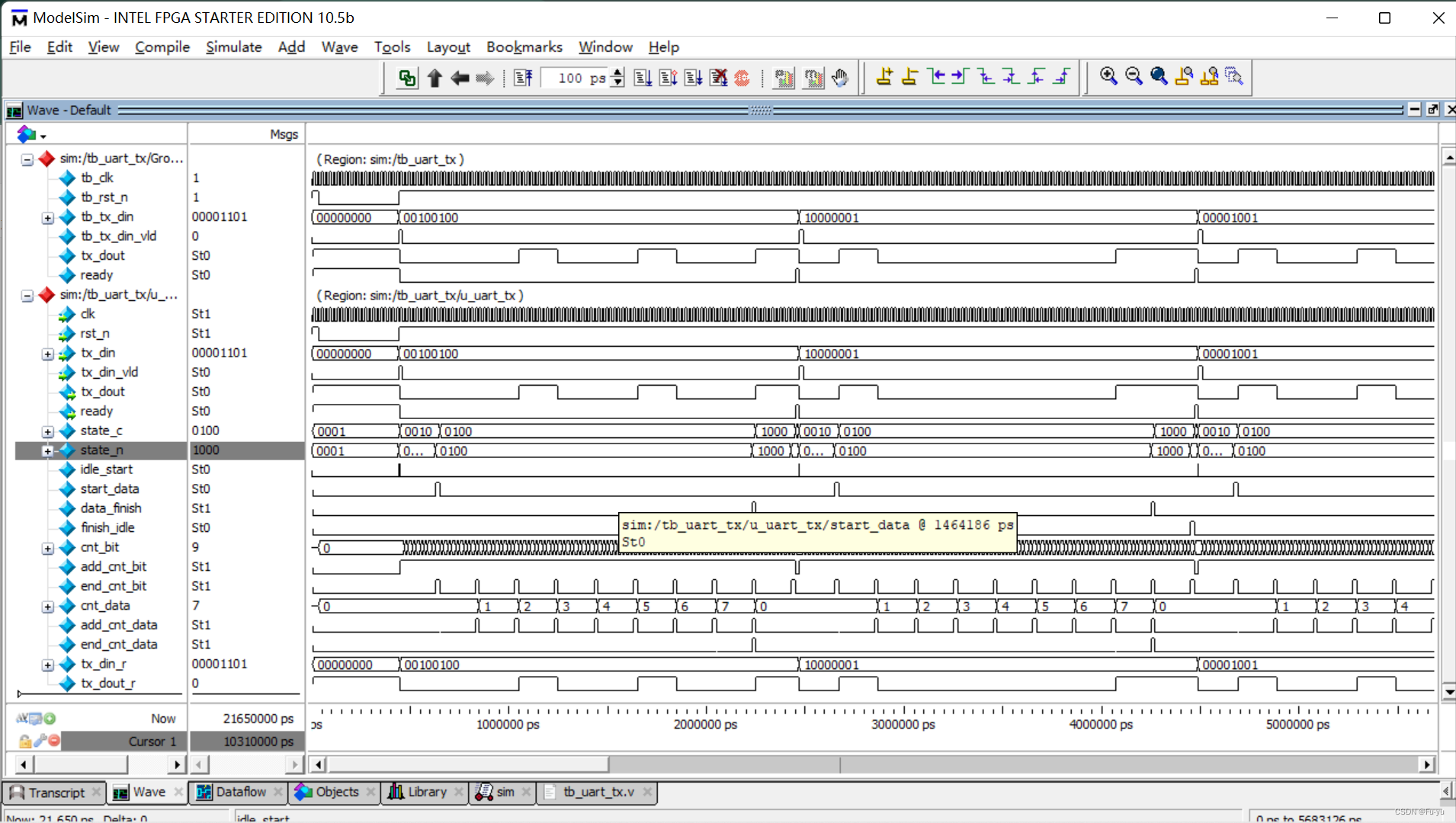
仿真波形图:
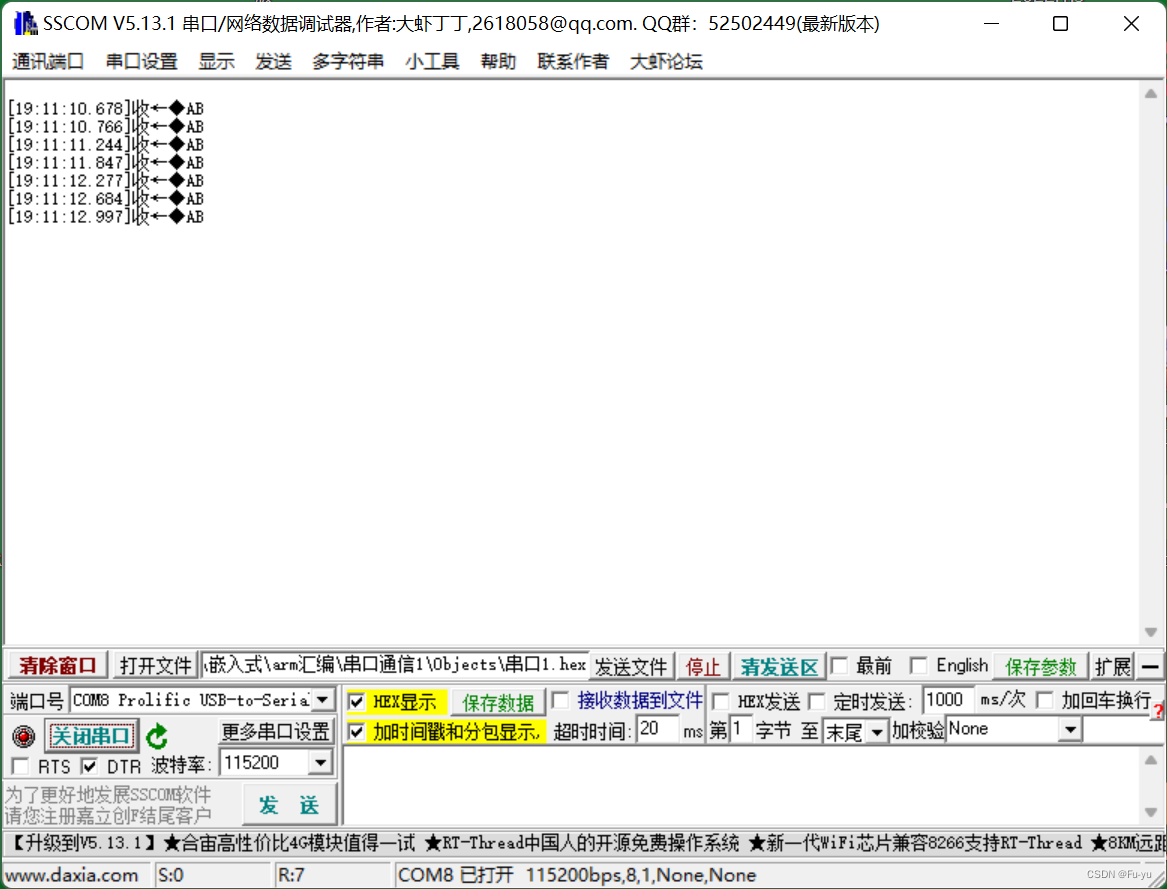
上板验证:
加入按键控制模块,每一次按下,输出8’hAB
按键消抖模块:
/*
* @Description: 按键消抖,使用延迟方法,消抖后输出高电平信号
* @Author: Fu Yu
* @Date: 2023-08-07 14:22:56
* @LastEditTime: 2023-08-07 14:48:48
* @LastEditors: Fu Yu
*/
module key_filter #(
parameter WITDH = 3//WITDH表示位宽
)(
input wire clk ,
input wire rst_n ,
input wire [WITDH-1:0] key_in ,
output wire [WITDH-1:0] key_down
);
parameter MAX_20MA = 20'd999_999;//20ms
reg [WITDH - 1:0] key_r0;//同步信号
reg [WITDH - 1:0] key_r1;//打拍
reg [WITDH - 1:0] key_r2;
reg [WITDH - 1:0] key_down_r;
reg [19:0] cnt_20ms;
reg flag;//开始计数信号
wire [WITDH - 1:0] nedge;//下降沿
wire add_cnt_20ms;
wire end_cnt_20ms;
//****************************************************************
//--同步,打拍
//****************************************************************
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
key_r0 <= {WITDH{1'b1}};
key_r1 <= {WITDH{1'b1}};
key_r2 <= {WITDH{1'b1}};
end
else begin
key_r0 <= key_in;
key_r1 <= key_r0;
key_r2 <= key_r1;
end
end
//下降沿检测
assign nedge = ~key_r1 & key_r2;
//****************************************************************
//--flag
//****************************************************************
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
flag <= 1'b0;
end
else if(nedge) begin//检测到下降沿开始计数
flag <= 1'b1;
end
else if(end_cnt_20ms) begin//20ms后停止计数
flag <= 1'b0;
end
else begin
flag <= flag;
end
end
//****************************************************************
//--20ms计数器
//****************************************************************
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
cnt_20ms <= 20'd0;
end
else if(add_cnt_20ms)begin
if(end_cnt_20ms)begin
cnt_20ms <= 20'd0;
end
else begin
cnt_20ms <= cnt_20ms + 1'b1;
end
end
end
assign add_cnt_20ms = flag;
assign end_cnt_20ms = add_cnt_20ms && cnt_20ms == MAX_20MA;
//****************************************************************
//--key_down
//****************************************************************
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
key_down_r <= {WITDH{1'b0}};
end
else if(end_cnt_20ms) begin
key_down_r <= ~key_r2;
end
else begin
key_down_r <= {WITDH{1'b0}};
end
end
assign key_down = key_down_r;
endmodule //key_filter
顶层模块:
module top (
input wire clk ,
input wire rst_n ,
input wire key_in ,
output wire tx
);
wire key_wire;
wire ready;
key_filter #(.WITDH(1)) u_key_filter(
/* input wire */. clk (clk) ,
/* input wire */. rst_n (rst_n) ,
/* input wire [WITDH-1:0]*/. key_in (key_in) ,
/* output wire [WITDH-1:0]*/. key_down(key_wire)
);
uart_tx u_uart_tx(
/*input wire */ . clk (clk) ,
/*input wire */ . rst_n (rst_n) ,
/*input wire [7:0] */ . tx_din (8'hab) ,
/*input wire */ . tx_din_vld(key_wire && ready) ,
/*output wire */ . tx_dout (tx) ,
/*output wire */ . ready (ready)
);
endmodule //top
效果展示:
四、rx模块接收
/*
* @Description: rx接收,波特率115200,系统时钟50M,传输1bit所需计数434个周期
* @Author: Fu Yu
* @Date: 2023-08-15 11:10:41
* @LastEditTime: 2023-08-16 10:03:27
* @LastEditors: Fu Yu
*/
module uart_rx (
input wire clk ,
input wire rst_n ,
input wire rx_din ,
output wire [7:0] rx_dout ,
output wire rx_dout_vld ,
output wire ready
);
parameter MAX_BIT = 50_000_000/115200;//1bit计数最大值,434
localparam IDLE = 4'b0001,
START = 4'b0010,
DATA = 4'b0100,
FINISH = 4'b1000;
reg [3:0] state_c;//现态
reg [3:0] state_n;//次态
wire idle_start ;// IDLE -> START
wire start_data ;// START -> DATA
wire data_finish ;// DATA -> FINISH
wire finish_idle ;// FINFISH -> IDLE
reg [8:0] cnt_bit ;
wire add_cnt_bit ;
wire end_cnt_bit ;
reg [11:0] cnt_data ;
wire add_cnt_data ;
wire end_cnt_data ;
reg [7:0] rx_dout_r;
//****************************************************************
//-- 状态机
//****************************************************************
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
state_c <= IDLE;
end
else begin
state_c <= state_n;
end
end
always @( *) begin
case (state_c)
IDLE : begin
if(idle_start) begin
state_n = START;
end
else begin
state_n = state_c;
end
end
START : begin
if(start_data) begin
state_n = DATA;
end
else begin
state_n = state_c;
end
end
DATA : begin
if(data_finish) begin
state_n = FINISH;
end
else begin
state_n = state_c;
end
end
FINISH : begin
if(finish_idle) begin
state_n = IDLE;
end
else begin
state_n = state_c;
end
end
default : state_n = IDLE;
endcase
end
assign idle_start = state_c == IDLE && rx_din == 0 ;
assign start_data = state_c == START && end_cnt_bit;
assign data_finish = state_c == DATA && end_cnt_data;
assign finish_idle = state_c == FINISH && end_cnt_bit;
//****************************************************************
//-- 计数器
//****************************************************************
//1bit计数器
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
cnt_bit <= 'd0;
end
else if(add_cnt_bit)begin
if(end_cnt_bit)begin
cnt_bit <= 'd0;
end
else begin
cnt_bit <= cnt_bit + 1'b1;
end
end
end
assign add_cnt_bit = state_c == START || state_c == FINISH || state_c == DATA;
assign end_cnt_bit = add_cnt_bit && cnt_bit == MAX_BIT - 1;
//8bit计数器
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
cnt_data <= 'd0;
end
else if(add_cnt_data)begin
if(end_cnt_data)begin
cnt_data <= 'd0;
end
else begin
cnt_data <= cnt_data + 1'b1;
end
end
end
assign add_cnt_data = state_c == DATA && end_cnt_bit;
assign end_cnt_data = add_cnt_data && cnt_data == 8 - 1 ;
//****************************************************************
//-- 实现数据接收
//****************************************************************
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
rx_dout_r <= 0;
end
else if(state_c == DATA && cnt_bit == MAX_BIT >> 1) begin
rx_dout_r[cnt_data] <= rx_din;
end
end
assign rx_dout = rx_dout_r;
assign rx_dout_vld = data_finish;
assign ready = state_c == IDLE;
endmodule //uart_rx
ip核fifo调用:
module ctrl (
input wire clk ,
input wire rst_n ,
input wire [7:0] rx_data ,
input wire rx_data_vld ,
input wire tx_ready ,
output wire [7:0] tx_data ,
output wire tx_data_vld
);
wire fifo_rd_empty;
wire fifo_wr_full;
fifo fifo_inst (
.aclr ( ~rst_n ),
.data ( rx_data ),
.wrclk ( clk ),
.wrreq ( rx_data_vld && ~fifo_wr_full ),
.q ( tx_data ),
.rdclk ( clk ),
.rdreq ( tx_ready && ~fifo_rd_empty ),
.rdempty ( fifo_rd_empty ),
.wrfull ( fifo_wr_full )
);
assign tx_data_vld = tx_ready && ~fifo_rd_empty ;
endmodule //ctrl
顶层模块:
module top (
input wire clk ,
input wire rst_n ,
input wire key_in ,
input wire rx ,
output wire tx
);
wire key_wire;
wire tx_ready;
wire [7:0] rx_data;
wire rx_data_vld;
wire [7:0] tx_data;
wire tx_data_vld;
key_filter #(.WITDH(1)) u_key_filter(
/* input wire */. clk (clk) ,
/* input wire */. rst_n (rst_n) ,
/* input wire [WITDH-1:0]*/. key_in (key_in) ,
/* output wire [WITDH-1:0]*/. key_down(key_wire)
);
uart_tx u_uart_tx(
/*input wire */ . clk (clk) ,
/*input wire */ . rst_n (rst_n) ,
/*input wire [7:0] */ . tx_din (tx_data) ,
/*input wire */ . tx_din_vld(tx_data_vld) ,
/*output wire */ . tx_dout (tx) ,
/*output wire */ . ready (tx_ready)
);
uart_rx u_uart_rx(
/* input wire */. clk (clk ) ,
/* input wire */. rst_n (rst_n ) ,
/* input wire */. rx_din (rx ) ,
/* output wire [7:0] */. rx_dout (rx_data) ,
/* output wire */. rx_dout_vld(rx_data_vld) ,
/* output wire */. ready ()
);
ctrl u_ctrl(
/* input wire */ . clk (clk) ,
/* input wire */ . rst_n (rst_n) ,
/* input wire [7:0] */ . rx_data (rx_data) ,
/* input wire */ . rx_data_vld(rx_data_vld) ,
/* input wire */ . tx_ready (tx_ready) ,
/* output wire [7:0] */ . tx_data (tx_data) ,
/* output wire */ . tx_data_vld(tx_data_vld)
);
endmodule //top
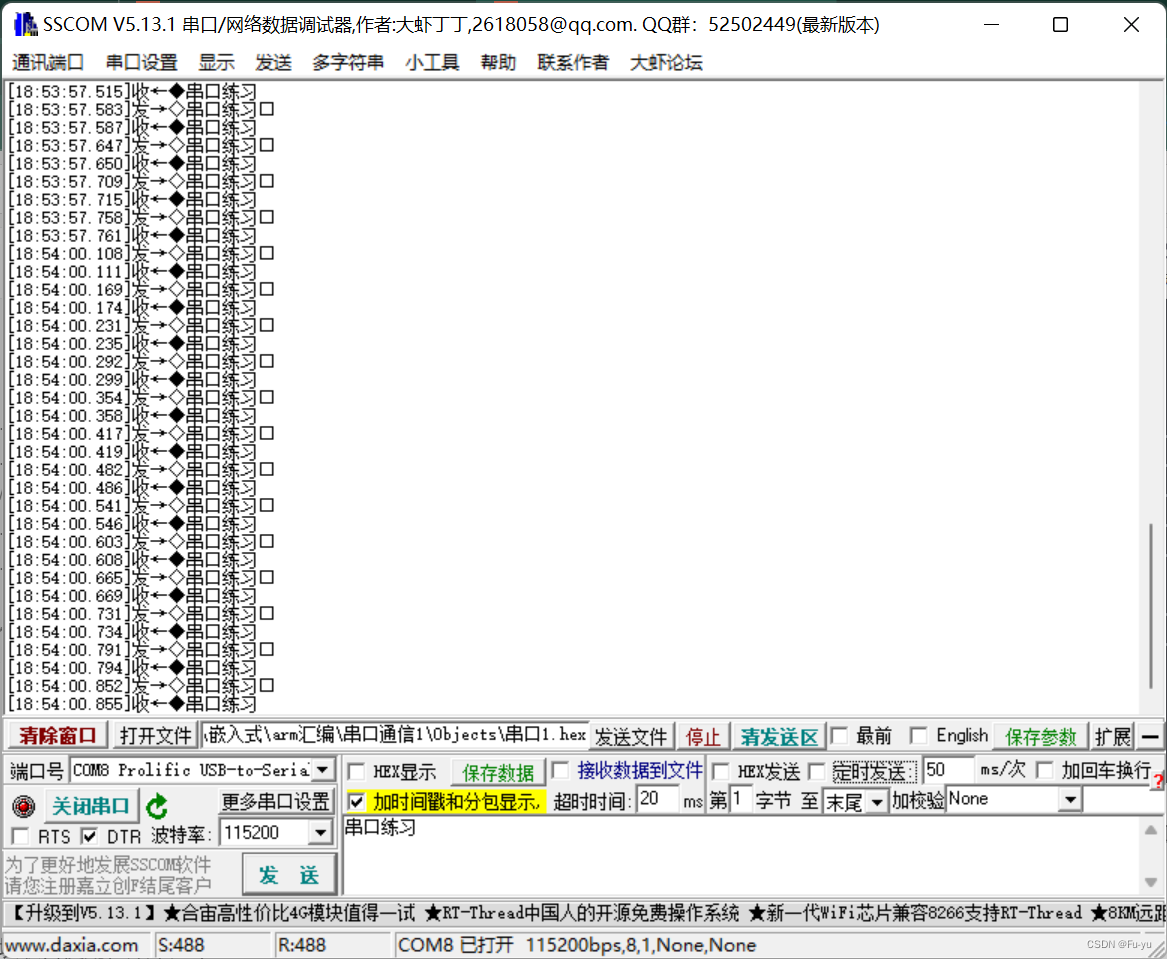
将rx接收模块与tx发送模块联合使用,效果如下: