一些前言与感慨:
学了再多的AI,终究还是没有办法拒绝计算机图形学的魅力。当初就不该一招不慎,踏入AI的坑。
可惜当年在学校里学计算机图形学的时候,还没有闫令琪这么好的课程,当时学得一知半解,云里雾里,希望一切重新拾起还不算太晚。
GAMES101 11周的课程,值得用 C++和 OpenGL 好好写一写代码
学了计算机图形学,人会感慨数学公式和世界的奇妙,之前学的概率论、线性代数、高数、信号处理等,在这里统统用上了。时常觉得世界一定有一个很强大的运算器,才可以把真实世界渲染得这么完美,天衣无缝,没有bug.
文章目录
- 0 介绍
- 1 向量与线性代数
- 向量的计算
- 点乘(dot/scalar product)
- 叉乘(cross/vector product)
- 在内部
- 坐标系
- 矩阵乘法
- 2 变换
- 2维变换
- 缩放
- 斜切
- 旋转
- 齐次坐标
- 平移变换
- 仿射变换
- 缩放
- 旋转
- 平移
- 组合变换
- 逆变换
- 旋转
- 三维变换
- 缩放
- 平移
- 旋转
- 齐次坐标
- 欧拉角
- 观测变换(viewing)
- view/camera transformation 视图变换
- projection transformation 投影变换
- Orthographic projection 正交投影
- perspective projection 透视投影
- 3 光栅化
- 锯齿问题
- 抗锯齿
- 滤波
- 深度测试 Z-buffer
0 介绍
- 课程主页
- 计算机图形学与混合现实在线平台GAMES
- GAMES101-现代计算机图形学入门-闫令琪
- 课程笔记
- 课程笔记🌟
- 作业链接
光线追踪 - 慢,常用于电影中,生成效果好,一般离线使用
有实时光线追踪算法
- 不讲 shaders
- OpenGL / DirectX / Vulcan 属于 API,不会教如何做
- 不会教你使用 unity / unreal 引擎


总的大纲:
- 向量与线性代数、变换(二维、三维)、变换(模型、视图、投影)
- 光栅化(三角形的离散化、深度测试与抗锯齿)
- 着色
- 几何
- 光线追踪
- 材质与外观
1 向量与线性代数
向量:方向和长度,不关心绝对的起始位置
向量长度
单位向量
向量求和:平行四边形法则,三角形法则
代数上,直接求和
向量的计算
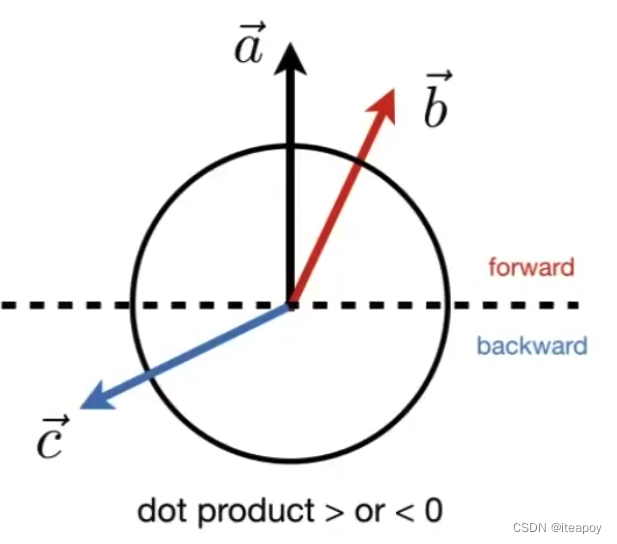
点乘(dot/scalar product)
- a ⃗ ⋅ b ⃗ = ∥ a ⃗ ∥ ∥ b ⃗ ∥ cos θ \vec{a} \cdot \vec{b}=\|\vec{a}\|\|\vec{b}\| \cos \theta a⋅b=∥a∥∥b∥cosθ
- cos θ = a ⃗ ⋅ b ⃗ ∥ a ⃗ ∥ ∥ b ⃗ ∥ \cos \theta=\frac{\vec{a} \cdot \vec{b}}{\|\vec{a}\|\|\vec{b}\|} cosθ=∥a∥∥b∥a⋅b
- 当两个向量都是单位向量时, cos θ = a ^ ⋅ b ^ \cos \theta=\hat{a} \cdot \hat{b} cosθ=a^⋅b^
- 性质:
- 交换律: a ⃗ ⋅ b ⃗ = b ⃗ ⋅ a ⃗ \vec{a} \cdot \vec{b}=\vec{b} \cdot \vec{a} a⋅b=b⋅a
- 分配律: a ⃗ ⋅ ( b ⃗ + c ⃗ ) = a ⃗ ⋅ b ⃗ + a ⃗ ⋅ c ⃗ \vec{a} \cdot(\vec{b}+\vec{c})=\vec{a} \cdot \vec{b}+\vec{a} \cdot \vec{c} a⋅(b+c)=a⋅b+a⋅c
- 结合律: ( k a ⃗ ) ⋅ b ⃗ = a ⃗ ⋅ ( k b ⃗ ) = k ( a ⃗ ⋅ b ⃗ ) (k \vec{a}) \cdot \vec{b}=\vec{a} \cdot(k \vec{b})=k(\vec{a} \cdot \vec{b}) (ka)⋅b=a⋅(kb)=k(a⋅b)
- 在笛卡尔坐标系下:
- 2维: a ⃗ ⋅ b ⃗ = ( x a y a ) ⋅ ( x b y b ) = x a x b + y a y b \vec{a} \cdot \vec{b}=\left(\begin{array}{l}x_a \\ y_a\end{array}\right) \cdot\left(\begin{array}{l}x_b \\ y_b\end{array}\right)=x_a x_b+y_a y_b a⋅b=(xaya)⋅(xbyb)=xaxb+yayb
- 3维: a ⃗ ⋅ b ⃗ = ( x a y a z a ) ⋅ ( x b y b z b ) = x a x b + y a y b + z a z b \vec{a} \cdot \vec{b}=\left(\begin{array}{c}x_a \\ y_a \\ z_a\end{array}\right) \cdot\left(\begin{array}{c}x_b \\ y_b \\ z_b\end{array}\right)=x_a x_b+y_a y_b+z_a z_b a⋅b=⎝⎛xayaza⎠⎞⋅⎝⎛xbybzb⎠⎞=xaxb+yayb+zazb
- 图形学中的应用:
- 找到光照和平面的夹角
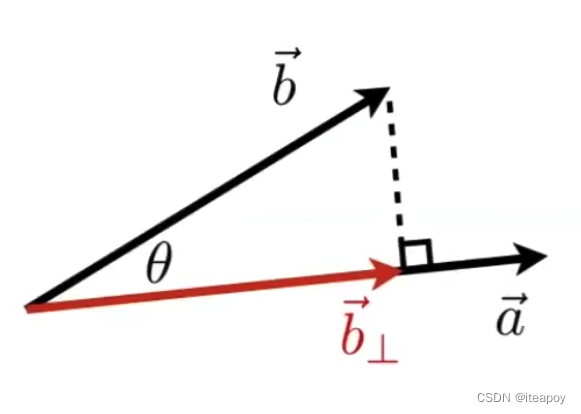
- 找到一个向量在另一个向量上的投影:
b
⃗
⊥
=
k
a
^
=
∥
b
⃗
∥
cos
θ
a
^
\vec{b}_{\perp}=k \hat{a} = \|\vec{b}\| \cos \theta \hat{a}
b⊥=ka^=∥b∥cosθa^
- 可以计算方向性
- 两个方向有多接近
叉乘(cross/vector product)
- 叉乘后的向量垂直于 a 和b 的向量组成的平面
a
×
b
=
−
b
×
a
a \times b=-b \times a
a×b=−b×a(不满足交换律)
- 大小: ∥ a × b ∥ = ∥ a ∥ b ∥ sin ϕ \|a \times b\|=\|a\| b \| \sin \phi ∥a×b∥=∥a∥b∥sinϕ
- 方向:右手定则(从a旋转到b的方向)(openGL API里是左手系)
- 性质:
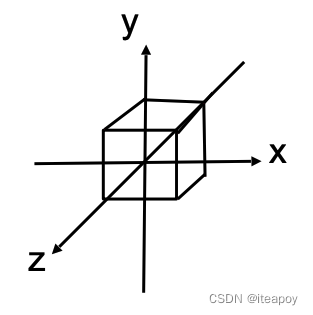
- x ⃗ × y ⃗ = + z ⃗ \vec{x} \times \vec{y}=+\vec{z} x×y=+z
- y ⃗ × x ⃗ = − z ⃗ \vec{y} \times \vec{x}=-\vec{z} y×x=−z
- y ⃗ × z ⃗ = + x ⃗ \vec{y} \times \vec{z}=+\vec{x} y×z=+x
- z ⃗ × y ⃗ = − x ⃗ \vec{z} \times \vec{y}=-\vec{x} z×y=−x
- z ⃗ × x ⃗ = + y ⃗ \vec{z} \times \vec{x}=+\vec{y} z×x=+y
- x ⃗ × z ⃗ = − y ⃗ \vec{x} \times \vec{z}=-\vec{y} x×z=−y
- a ⃗ × b ⃗ = − b ⃗ × a ⃗ \vec{a} \times \vec{b}=-\vec{b} \times \vec{a} a×b=−b×a
- a ⃗ × a ⃗ = 0 → \vec{a} \times \vec{a}=\overrightarrow{0} a×a=0(长度为0的向量)
- 分配律: a ⃗ × ( b ⃗ + c ⃗ ) = a ⃗ × b ⃗ + a ⃗ × c ⃗ \vec{a} \times(\vec{b}+\vec{c})=\vec{a} \times \vec{b}+\vec{a} \times \vec{c} a×(b+c)=a×b+a×c
- 结合律: a ⃗ × ( k b ⃗ ) = k ( a ⃗ × b ⃗ ) \vec{a} \times(k \vec{b})=k(\vec{a} \times \vec{b}) a×(kb)=k(a×b)
- 代数
- a ⃗ × b ⃗ = ( y a z b − y b z a z a x b − x a z b x a y b − y a x b ) \vec{a} \times \vec{b}=\left(\begin{array}{c}y_a z_b-y_b z_a \\ z_a x_b-x_a z_b \\ x_a y_b-y_a x_b\end{array}\right) a×b=⎝⎛yazb−ybzazaxb−xazbxayb−yaxb⎠⎞
- 可以表示成矩阵的形式: a ⃗ × b ⃗ = A ∗ b = ( 0 − z a y a z a 0 − x a − y a x a 0 ) ( x b y b z b ) \vec{a} \times \vec{b}=A^* b=\left(\begin{array}{ccc}0 & -z_a & y_a \\ z_a & 0 & -x_a \\ -y_a & x_a & 0\end{array}\right)\left(\begin{array}{l}x_b \\ y_b \\ z_b\end{array}\right) a×b=A∗b=⎝⎛0za−ya−za0xaya−xa0⎠⎞⎝⎛xbybzb⎠⎞
- 应用:
坐标系
- 任意三个向量,如果满足以下条件,则构成一个直角坐标系
- ∥ u ⃗ ∥ = ∥ v ⃗ ∥ = ∥ w ⃗ ∥ = 1 \|\vec{u}\|=\|\vec{v}\|=\|\vec{w}\|=1 ∥u∥=∥v∥=∥w∥=1
- u ⃗ ⋅ v ⃗ = v ⃗ ⋅ w ⃗ = u ⃗ ⋅ w ⃗ = 0 \vec{u} \cdot \vec{v}=\vec{v} \cdot \vec{w}=\vec{u} \cdot \vec{w}=0 u⋅v=v⋅w=u⋅w=0
- w ⃗ = u ⃗ × v ⃗ \vec{w}=\vec{u} \times \vec{v} \quad w=u×v (right-handed)
- 任意一个向量,分解到这个直角坐标系中,用投影相加
- p ⃗ = ( p ⃗ ⋅ u ⃗ ) u ⃗ + ( p ⃗ ⋅ v ⃗ ) v ⃗ + ( p ⃗ ⋅ w ⃗ ) w ⃗ \vec{p}=(\vec{p} \cdot \vec{u}) \vec{u}+(\vec{p} \cdot \vec{v}) \vec{v}+(\vec{p} \cdot \vec{w}) \vec{w} p=(p⋅u)u+(p⋅v)v+(p⋅w)w
矩阵乘法
- 矩阵变换:移动、旋转、缩放、错切
- 性质:
- 没有交换律
- 结合律: ( A B ) C = A ( B C ) (A B) C=A(B C) (AB)C=A(BC)
- 分配律:
- A ( B + C ) = A B + A C A(B+C)=A B+A C A(B+C)=AB+AC
- ( A + B ) C = A C + B C (A+B) C=A C+B C (A+B)C=AC+BC
- 性质:
- 矩阵的转置
- 行和列交换
- ( 1 2 3 4 5 6 ) T = ( 1 3 5 2 4 6 ) \left(\begin{array}{ll}1 & 2 \\ 3 & 4 \\ 5 & 6\end{array}\right)^T=\left(\begin{array}{lll}1 & 3 & 5 \\ 2 & 4 & 6\end{array}\right) ⎝⎛135246⎠⎞T=(123456)
- 性质: ( A B ) T = B T A T (A B)^T=B^T A^T (AB)T=BTAT
- 行和列交换
- 单位矩阵
- 对角阵
- 矩阵互逆:
- A A − 1 = A − 1 A = I A A^{-1}=A^{-1} A=I AA−1=A−1A=I
- 性质: ( A B ) − 1 = B − 1 A − 1 (A B)^{-1}=B^{-1} A^{-1} (AB)−1=B−1A−1
- 用矩阵的形式表示向量的计算
- 点乘: a ⃗ ⋅ b ⃗ = a ⃗ T b ⃗ = ( x a y a z a ) ( x b y b z b ) = ( x a x b + y a y b + z a z b ) \vec{a} \cdot \vec{b}=\vec{a}^T \vec{b}=\left(\begin{array}{lll}x_a & y_a & z_a\end{array}\right)\left(\begin{array}{c}x_b \\ y_b \\ z_b\end{array}\right)=\left(x_a x_b+y_a y_b+z_a z_b\right) a⋅b=aTb=(xayaza)⎝⎛xbybzb⎠⎞=(xaxb+yayb+zazb)
- 叉乘: a ⃗ × b ⃗ = A ∗ b = ( 0 − z a y a z a 0 − x a − y a x a 0 ) ( x b y b z b ) \vec{a} \times \vec{b}=A^* b=\left(\begin{array}{ccc}0 & -z_a & y_a \\ z_a & 0 & -x_a \\ -y_a & x_a & 0\end{array}\right)\left(\begin{array}{l}x_b \\ y_b \\ z_b\end{array}\right) a×b=A∗b=⎝⎛0za−ya−za0xaya−xa0⎠⎞⎝⎛xbybzb⎠⎞(向量 a ⃗ \vec{a} a 的对偶矩阵 A ∗ A^* A∗)
2 变换
-
用途:
- 模型变换(modeling)
- 视图变换(viewing)
- 三维投影到二维(视图发生变化)
-
MVP 变换:model transformation -> view transformation -> projection transformation
2维变换
- 线性变换:
- x ′ = a x + b y x^{\prime}=ax+by x′=ax+by
- y ′ = c x + d y y^{\prime}=cx+dy y′=cx+dy
- [ x ′ y ′ ] = [ a b c d ] [ x y ] \left[\begin{array}{l}x^{\prime} \\ y^{\prime}\end{array}\right]=\left[\begin{array}{ll}a & b \\ c & d\end{array}\right]\left[\begin{array}{l}x \\ y\end{array}\right] [x′y′]=[acbd][xy]
- 用矩阵表示
缩放
-
[ x ′ y ′ ] = [ s x 0 0 s y ] [ x y ] = [ s x x s y y ] \left[\begin{array}{l}x^{\prime} \\ y^{\prime}\end{array}\right]=\left[\begin{array}{ll}s_x & 0 \\ 0 & s_y\end{array}\right]\left[\begin{array}{l}x \\ y\end{array}\right] = \left[\begin{array}{l}s_x x \\ s_y y\end{array}\right] [x′y′]=[sx00sy][xy]=[sxxsyy]
-
沿着 y 轴的反射:KaTeX parse error: Unknown column alignment: m at position 191: …[\begin{array}{m̲} -x \\ y \end…
斜切
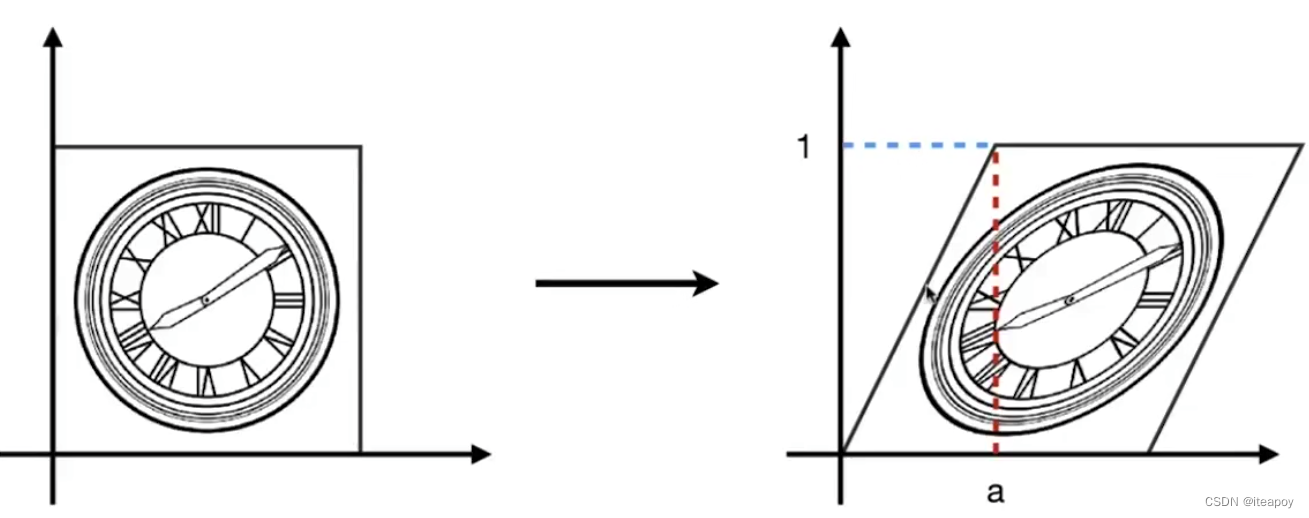
- [ x ′ y ′ ] = [ 1 a 0 1 ] [ x y ] \left[\begin{array}{l}x^{\prime} \\ y^{\prime}\end{array}\right]=\left[\begin{array}{ll}1 & a \\ 0 & 1\end{array}\right]\left[\begin{array}{l}x \\ y\end{array}\right] [x′y′]=[10a1][xy]
旋转
默认是绕着原点逆时针旋转
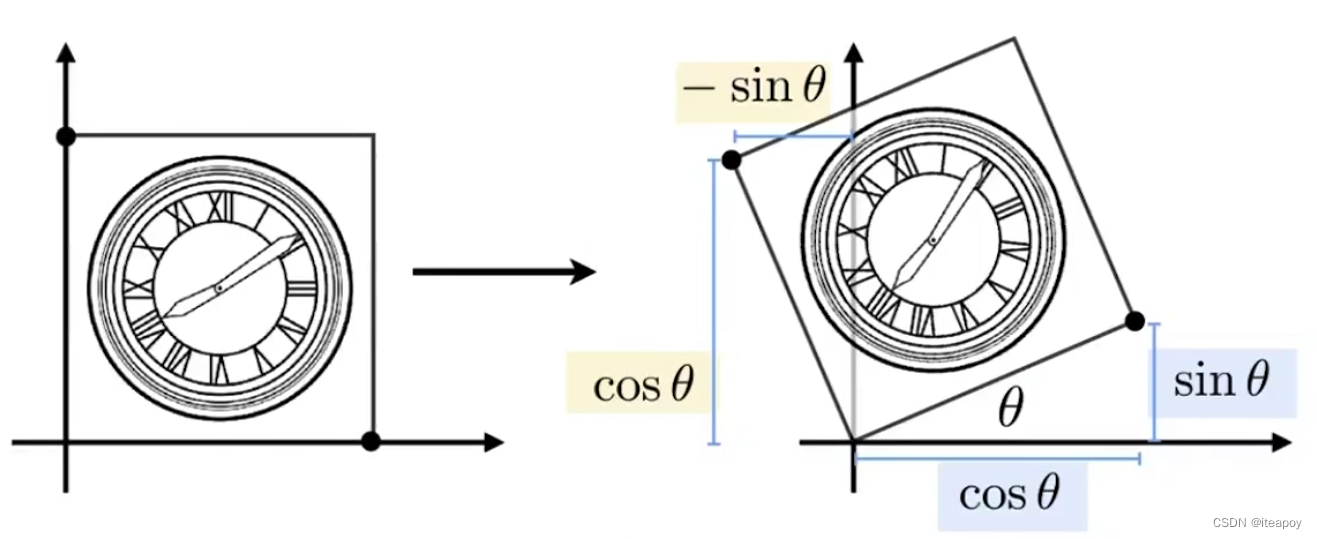
- 旋转矩阵: R θ = [ cos θ − sin θ sin θ cos θ ] \mathbf{R}_\theta=\left[\begin{array}{cc}\textcolor{#7785aa}{\cos \theta} & \textcolor{#e4da9a}{-\sin \theta} \\ \textcolor{#7785aa}{\sin \theta} & \textcolor{#e4da9a}{\cos \theta} \end{array}\right] Rθ=[cosθsinθ−sinθcosθ]
齐次坐标
平移变换
-
平移变换不属于线性变换!!!
- Q:如何用一种统一的方法来表示?
- A:二维的向量增加一个维度,变成三维的(引入齐次变换)
- 二维的点: ( x , y , 1 ) T \left(\mathbf{x}, \mathbf{y}, \textcolor{red}{1}\right)^{\mathrm{T}} (x,y,1)T
- 二维的向量: ( x , y , 0 ) T \left(\mathbf{x}, \mathbf{y}, \textcolor{red}{0}\right)^{\mathrm{T}} (x,y,0)T - 向量具有平移不变性
- 验证其有效性:
- 向量 + 向量 = 向量
- 点 - 点 = 向量
- 点 + 向量 = 点
- 点 + 点 = 两个点的中点(扩充的定义) - ( x y w ) \left(\begin{array}{l}x \\ y \\ w \end{array}\right) ⎝⎛xyw⎠⎞ 相当于 ( x w y w 1 ) \left(\begin{array}{l}\frac{x}{w} \\ \frac{y}{w} \\ 1 \end{array}\right) ⎝⎛wxwy1⎠⎞ 此处 w ≠ 0 w\neq 0 w=0
-
( x ′ y ′ ) = ( x y ) + ( t x t y ) \left(\begin{array}{l}x^{\prime} \\ y^{\prime}\end{array}\right)=\left(\begin{array}{l}x \\ y\end{array}\right)+\left(\begin{array}{l}t_x \\ t_y\end{array}\right) (x′y′)=(xy)+(txty)
-
( x ′ y ′ w ′ ) = ( 1 0 t x 0 1 t y 0 0 1 ) ⋅ ( x y 1 ) = ( x + t x y + t y 1 ) \left(\begin{array}{c}x^{\prime} \\ y^{\prime} \\ w^{\prime}\end{array}\right)=\left(\begin{array}{llc}1 & 0 & t_x \\ 0 & 1 & t_y \\ 0 & 0 & 1\end{array}\right) \cdot\left(\begin{array}{l}x \\ y \\ 1\end{array}\right)=\left(\begin{array}{c}x+t_x \\ y+t_y \\ 1\end{array}\right) ⎝⎛x′y′w′⎠⎞=⎝⎛100010txty1⎠⎞⋅⎝⎛xy1⎠⎞=⎝⎛x+txy+ty1⎠⎞
仿射变换
-
仿射变换 = (先) 线性变换 + (再) 平移变换
- 在二维仿射变换情况下,最后一行都是 0 0 1
-
( x ′ y ′ ) = ( a b c d ) ⋅ ( x y ) + ( t x t y ) \left(\begin{array}{l}x^{\prime} \\ y^{\prime}\end{array}\right)=\left(\begin{array}{ll}a & b \\ c & d\end{array}\right) \cdot\left(\begin{array}{l}x \\ y\end{array}\right)+\left(\begin{array}{l}t_x \\ t_y\end{array}\right) (x′y′)=(acbd)⋅(xy)+(txty)
等价于
- ( x ′ y ′ 1 ) = ( a b t x c d t y 0 0 1 ) ⋅ ( x y 1 ) \left(\begin{array}{c}x^{\prime} \\ y^{\prime} \\ 1 \end{array}\right)=\left(\begin{array}{llc}a & b & t_x \\ c & d & t_y \\ 0 & 0 & 1\end{array}\right) \cdot\left(\begin{array}{l}x \\ y \\ 1\end{array}\right) ⎝⎛x′y′1⎠⎞=⎝⎛ac0bd0txty1⎠⎞⋅⎝⎛xy1⎠⎞
缩放
- S ( s x , s y ) = ( s x 0 0 0 s y 0 0 0 1 ) S(s_x, s_y) = \left(\begin{array}{llc} s_x & 0 & 0 \\ 0 & s_y & 0 \\ 0 & 0 & 1\end{array}\right) S(sx,sy)=⎝⎛sx000sy0001⎠⎞
旋转
- R ( α ) = ( cos α − sin α 0 sin α cos α 0 0 0 1 ) R(\alpha) = \left(\begin{array}{llc} \cos\alpha & -\sin\alpha & 0 \\ \sin\alpha & \cos\alpha & 0 \\ 0 & 0 & 1\end{array}\right) R(α)=⎝⎛cosαsinα0−sinαcosα0001⎠⎞
平移
- T ( t x , t y ) = ( 1 0 t x 0 1 t y 0 0 1 ) T(t_x, t_y) = \left(\begin{array}{llc} 1 & 0 & t_x \\ 0 & 1 & t_y \\ 0 & 0 & 1\end{array}\right) T(tx,ty)=⎝⎛100010txty1⎠⎞
组合变换
-
平移、旋转、缩放变换可以组合起来
-
变换的顺序很重要,不能调换(矩阵的乘法不满足交换律)
- e.g. T ( 1 , 0 ) ⋅ R 45 ≠ R 45 ⋅ T ( 1 , 0 ) T_{(1,0)} \cdot R_{45} \neq R_{45} \cdot T_{(1,0)} T(1,0)⋅R45=R45⋅T(1,0)
-
可以通过矩阵的乘法来实现组合变换,从右到左的操作
- A n ( … A 2 ( A 1 ( x ) ) ) = A n ⋯ A 2 ⋅ A 1 ⋅ ( x y 1 ) A_n\left(\ldots A_2\left(A_1(\mathbf{x})\right)\right)=\mathbf{A}_n \cdots \mathbf{A}_2 \cdot \mathbf{A}_1 \cdot\left(\begin{array}{l}x \\ y \\ 1\end{array}\right) An(…A2(A1(x)))=An⋯A2⋅A1⋅⎝⎛xy1⎠⎞
- e.g. 先旋转 45度,再平移 (1, 0)
- T ( 1 , 0 ) ⋅ R 45 [ x y 1 ] = [ 1 0 1 0 1 0 0 0 1 ] [ cos 4 5 ∘ − sin 4 5 ∘ 0 sin 4 5 ∘ cos 4 5 ∘ 0 0 0 1 ] [ x y 1 ] = [ cos 4 5 ∘ − sin 4 5 ∘ 1 sin 4 5 ∘ cos 4 5 ∘ 0 0 0 1 ] [ x y 1 ] T_{(1,0)} \cdot R_{45}\left[\begin{array}{c}x \\ y \\ 1\end{array}\right]=\left[\begin{array}{lll}1 & 0 & 1 \\ 0 & 1 & 0 \\ 0 & 0 & 1\end{array}\right]\left[\begin{array}{ccc}\cos 45^{\circ} & -\sin 45^{\circ} & 0 \\ \sin 45^{\circ} & \cos 45^{\circ} & 0 \\ 0 & 0 & 1\end{array}\right]\left[\begin{array}{l}x \\ y \\ 1\end{array}\right] = \left[\begin{array}{ccc}\cos 45^{\circ} & -\sin 45^{\circ} & 1 \\ \sin 45^{\circ} & \cos 45^{\circ} & 0 \\ 0 & 0 & 1\end{array}\right]\left[\begin{array}{l}x \\ y \\ 1\end{array}\right] T(1,0)⋅R45⎣⎡xy1⎦⎤=⎣⎡100010101⎦⎤⎣⎡cos45∘sin45∘0−sin45∘cos45∘0001⎦⎤⎣⎡xy1⎦⎤=⎣⎡cos45∘sin45∘0−sin45∘cos45∘0101⎦⎤⎣⎡xy1⎦⎤
-
矩阵有结合律 => 可以用 3x3 的矩阵表示很复杂的变换
-
矩阵可以分解的好处:
-
给定一个点,如何绕着它进行旋转???
-
解决方法:
- 把点从中心平移到原点位置
- 旋转
- 平移回来
-

-
矩阵的表示: T ( c ) × R ( α ) × T ( − c ) T(c)\times R(\alpha) \times T(-c) T(c)×R(α)×T(−c)(注意从右到左的变换顺序)
-
逆变换
变回来,相当于乘以一个矩阵的逆矩阵
旋转
已知旋转 θ \theta θ 角为:
- R θ = ( cos θ − sin θ sin θ cos θ ) R_\theta=\left(\begin{array}{cc}\cos \theta & -\sin \theta \\ \sin \theta & \cos \theta\end{array}\right) Rθ=(cosθsinθ−sinθcosθ)
那么,旋转 − θ -\theta −θ 角
- R − θ = ( cos θ sin θ − sin θ cos θ ) = R θ T R_{-\theta}=\left(\begin{array}{cc}\cos \theta & \sin \theta \\ -\sin \theta & \cos \theta\end{array}\right)=R_\theta^{\mathrm{T}} R−θ=(cosθ−sinθsinθcosθ)=RθT(数值上相同)
而根据定义,旋转 − θ -\theta −θ 角是旋转 θ \theta θ 角的逆变换:
-
R − θ = R θ − 1 R_{-\theta}=R_\theta^{\mathrm{-1}} R−θ=Rθ−1
-
正交矩阵:逆矩阵=转置矩阵
三维变换
-
用齐次坐标表示:
- 三维的点: ( x , y , z , 1 ) T \left(\mathbf{x}, \mathbf{y}, \mathbf{z}, \textcolor{red}{1}\right)^{\mathrm{T}} (x,y,z,1)T
- 三维的向量: ( x , y , z , 0 ) T \left(\mathbf{x}, \mathbf{y}, \mathbf{z},\textcolor{red}{0}\right)^{\mathrm{T}} (x,y,z,0)T - 向量具有平移不变性
-
( x , y , z , w ) (x, y, z, w) (x,y,z,w) 在 w ≠ 0 w\neq 0 w=0 时表示一个三维空间中的点,即 ( x w , y w , z w ) (\frac{\mathrm{x}}{ \mathrm{w}}, \frac{\mathrm{y}}{\mathrm{w}}, \frac{\mathrm{z}}{\mathrm{w}}) (wx,wy,wz)
-
用 4 × 4 4\times4 4×4的齐次坐标来表示仿射变换
- ( x ′ y ′ z ′ 1 ) = ( a b c t x d e f t y g h i t z 0 0 0 1 ) ⋅ ( x y z 1 ) \left(\begin{array}{l}x^{\prime} \\ y^{\prime} \\ z^{\prime} \\ 1\end{array}\right)=\left(\begin{array}{llll}a & b & c & t_x \\ d & e & f & t_y \\ g & h & i & t_z \\ 0 & 0 & 0 & 1\end{array}\right) \cdot\left(\begin{array}{l}x \\ y \\ z \\ 1\end{array}\right) ⎝⎜⎜⎛x′y′z′1⎠⎟⎟⎞=⎝⎜⎜⎛adg0beh0cfi0txtytz1⎠⎟⎟⎞⋅⎝⎜⎜⎛xyz1⎠⎟⎟⎞
- 先应用线性变换,再加上平移
缩放
- S ( s x , s y , s z ) = ( s x 0 0 0 0 s y 0 0 0 0 s z 0 0 0 0 1 ) S(s_x, s_y, s_z) =\left(\begin{array}{llll}s_x & 0 & 0 & 0 \\ 0 & s_y & 0 & 0 \\ 0 & 0 & s_z & 0 \\ 0 & 0 & 0 & 1\end{array}\right) S(sx,sy,sz)=⎝⎜⎜⎛sx0000sy0000sz00001⎠⎟⎟⎞
平移
- T ( t x , t y , t z ) = ( 1 0 0 t x 0 1 0 t y 0 0 1 t z 0 0 0 1 ) T(t_x, t_y, t_z)=\left(\begin{array}{llll}1 & 0 & 0 & t_x \\ 0 & 1 & 0 & t_y \\ 0 & 0 & 1 & t_z \\ 0 & 0 & 0 & 1\end{array}\right) T(tx,ty,tz)=⎝⎜⎜⎛100001000010txtytz1⎠⎟⎟⎞
旋转
齐次坐标
-
绕着 x 轴, y轴, z轴旋转
-
绕着 x 轴旋转 R x ( α ) = ( 1 0 0 0 0 cos α − sin α 0 0 sin α cos α 0 0 0 0 1 ) R_x(\alpha)=\left(\begin{array}{llll}1 & 0 & 0 & 0 \\ 0 & \cos\alpha & -\sin\alpha & 0 \\ 0 & \sin\alpha & \cos\alpha & 0 \\ 0 & 0 & 0 & 1\end{array}\right) Rx(α)=⎝⎜⎜⎛10000cosαsinα00−sinαcosα00001⎠⎟⎟⎞
-
绕着 y 轴旋转 R y ( α ) = ( cos α 0 sin α 0 0 1 0 0 − sin α 0 cos α 0 0 0 0 1 ) R_y(\alpha)=\left(\begin{array}{llll}\cos\alpha & 0 & \sin\alpha & 0 \\ 0 & 1 & 0 & 0 \\ -\sin\alpha & 0 & \cos\alpha & 0 \\ 0 & 0 & 0 & 1\end{array}\right) Ry(α)=⎝⎜⎜⎛cosα0−sinα00100sinα0cosα00001⎠⎟⎟⎞
-
绕着 z 轴旋转 R z ( α ) = ( cos α − sin α 0 0 sin α cos α 0 0 0 0 1 0 0 0 0 1 ) R_z(\alpha)=\left(\begin{array}{llll}\cos\alpha & -\sin\alpha & 0 & 0 \\ \sin\alpha & \cos\alpha & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1\end{array}\right) Rz(α)=⎝⎜⎜⎛cosαsinα00−sinαcosα0000100001⎠⎟⎟⎞
欧拉角
-
三维旋转
- R x y z ( α , β , γ ) = R x ( α ) R y ( β ) R z ( γ ) \mathbf{R}_{x y z}(\alpha, \beta, \gamma)=\mathbf{R}_x(\alpha) \mathbf{R}_y(\beta) \mathbf{R}_z(\gamma) Rxyz(α,β,γ)=Rx(α)Ry(β)Rz(γ)
-
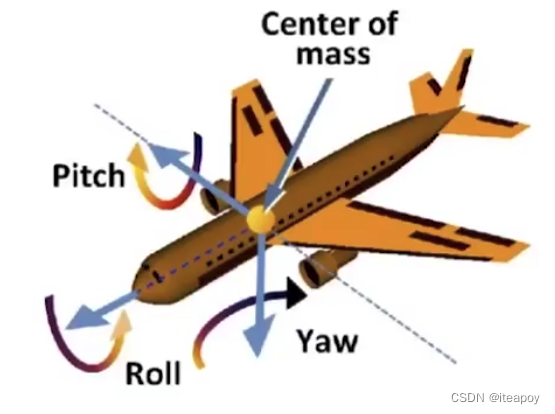
- roll
- pitch
- yaw
-
Rodirgues 旋转公式
- 绕着旋转轴 n n n (默认是过原点的轴)旋转 α \alpha α 角都可以变成 绕着 x, y, z 旋转
- R ( n , α ) = cos ( α ) I + ( 1 − cos ( α ) ) n n T + sin ( α ) ( 0 − n z n y n z 0 − n x − n y n x 0 ) ⏟ N \mathbf{R}(\mathbf{n}, \alpha)=\cos (\alpha) \mathbf{I}+(1-\cos (\alpha)) \mathbf{n} \mathbf{n}^T+\sin (\alpha) \underbrace{\left(\begin{array}{ccc}0 & -n_z & n_y \\ n_z & 0 & -n_x \\ -n_y & n_x & 0\end{array}\right)}_{\mathbf{N}} R(n,α)=cos(α)I+(1−cos(α))nnT+sin(α)N ⎝⎛0nz−ny−nz0nxny−nx0⎠⎞
- ( 0 − n z n y n z 0 − n x − n y n x 0 ) ⏟ N \underbrace{\left(\begin{array}{ccc}0 & -n_z & n_y \\ n_z & 0 & -n_x \\ -n_y & n_x & 0\end{array}\right)}_{\mathbf{N}} N ⎝⎛0nz−ny−nz0nxny−nx0⎠⎞ 表示叉乘
-
四元数
观测变换(viewing)
view/camera transformation 视图变换
- 从三维变成二维的图片
-
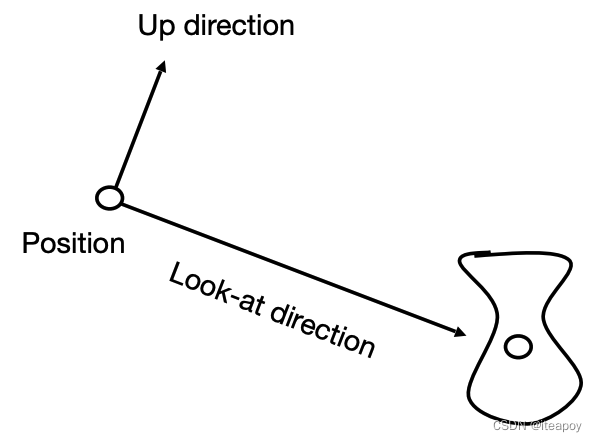
定义一个相机:
- 位置 e ⃗ \vec{e} e
- 看的方向(look-at) g ^ \hat{g} g^
- 向上的位置 t ^ \hat{t} t^ (假设是垂直于 look-at 的位置)
-
因为物体和相机是相对的,假设相机的位置固定
-
-
相机永远在原点 ( 0 , 0 , 0 ) (0,0,0) (0,0,0),往 − Z -Z −Z 方向看,向上是 Y Y Y
-
-
如何进行视图变换?
- 将相机的位置 e ⃗ \vec{e} e 平移到原点 ( 0 , 0 , 0 ) (0,0,0) (0,0,0)
- 把 g ^ \hat{g} g^ 转到 − Z -Z −Z 方向
- 把 t ^ \hat{t} t^ 转到 Y Y Y 方向
- 把 g ^ × t ^ \hat{g}\times\hat{t} g^×t^ 转到 X X X 方向
projection transformation 投影变换
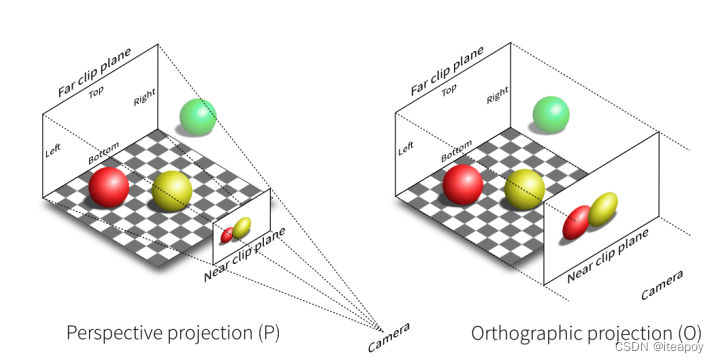
- 正交投影 vs. 透视投影
- 正交投影:不会造成近大远小的视觉差
- 正交投影:认为相机是一个点
- 透视投影:认为相机是无限远
Orthographic projection 正交投影
-
如何把一个 [ l , r ] × [ b , t ] × [ f , n ] [\mathbf{l}, \mathrm{r}] \times[\mathrm{b}, \mathrm{t}] \times[\mathbf{f}, \mathbf{n}] [l,r]×[b,t]×[f,n] ( n > f n>f n>f)的物体变到相机坐标系中?
- **相机固定在原点 ( 0 , 0 , 0 ) (0,0,0) (0,0,0),往 − Z -Z −Z 方向看,向上是 Y Y Y
- 把z轴丢掉,就都在一个平面上啦!
- 再把 xy 平面的图归一化到 [ − 1 , 1 ] [-1,1] [−1,1]
-
沿着 − Z -Z −Z 方向看
- 离人近 Z Z Z 值大
- 离人远 Z Z Z 值小
-
正交投影变换矩阵:先平移到原点,再旋转变换(注意后一个式子中最后一列和平移矩阵最后一列的缩放关系)
- M ortho = [ 2 r − l 0 0 0 0 2 t − b 0 0 0 0 2 n − f 0 0 0 0 1 ] [ 1 0 0 − r + l 2 0 1 0 − t + b 2 0 0 1 − n + f 2 0 0 0 1 ] = [ 2 r − l 0 0 − r + l r − l 0 2 t − b 0 − t + b t − b 0 0 2 n − f − n + f n − f 0 0 0 1 ] M_{\text {ortho }}=\left[\begin{array}{cccc}\frac{2}{r-l} & 0 & 0 & 0 \\ 0 & \frac{2}{t-b} & 0 & 0 \\ 0 & 0 & \frac{2}{n-f} & 0 \\ 0 & 0 & 0 & 1\end{array}\right]\left[\begin{array}{cccc}1 & 0 & 0 & -\frac{r+l}{2} \\ 0 & 1 & 0 & -\frac{t+b}{2} \\ 0 & 0 & 1 & -\frac{n+f}{2} \\ 0 & 0 & 0 & 1\end{array}\right] = \left[\begin{array}{cccc}\frac{2}{r-l} & 0 & 0 & -\frac{r+l}{r-l} \\ 0 & \frac{2}{t-b} & 0 & -\frac{t+b}{t-b} \\ 0 & 0 & \frac{2}{n-f} & -\frac{n+f}{n-f} \\ 0 & 0 & 0 & 1\end{array}\right] Mortho =⎣⎢⎢⎡r−l20000t−b20000n−f200001⎦⎥⎥⎤⎣⎢⎢⎡100001000010−2r+l−2t+b−2n+f1⎦⎥⎥⎤=⎣⎢⎢⎡r−l20000t−b20000n−f20−r−lr+l−t−bt+b−n−fn+f1⎦⎥⎥⎤
perspective projection 透视投影
-
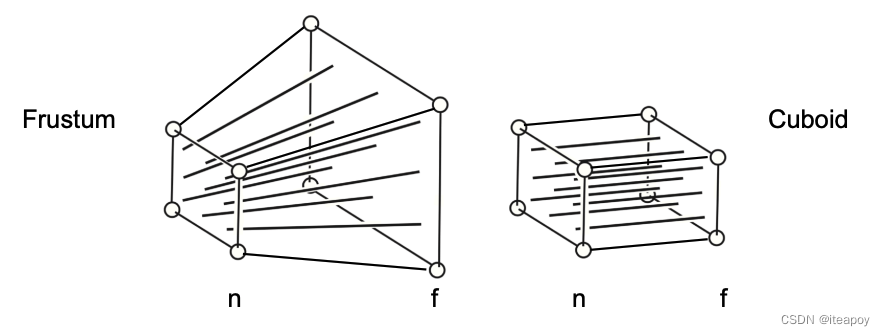
怎么做?
- 先把远平面挤压成和近平面一样大小( M persp → ortho M_{\text {persp } \rightarrow \text { ortho }} Mpersp → ortho )
- 再进行正交投影( M ortho M_{\text {ortho }} Mortho )
-
公式: M persp = M ortho M persp → ortho M_{\text {persp }}=M_{\text {ortho }} M_{\text {persp } \rightarrow \text { ortho }} Mpersp =Mortho Mpersp → ortho
- M persp → ortho = ( n 0 0 0 0 n 0 0 0 0 n + f − n f 0 0 1 0 ) M_{\text {persp } \rightarrow \text { ortho }}=\left(\begin{array}{cccc}n & 0 & 0 & 0 \\ 0 & n & 0 & 0 \\ 0 & 0 & n+f & -nf \\ 0 & 0 & 1 & 0\end{array}\right) Mpersp → ortho =⎝⎜⎜⎛n0000n0000n+f100−nf0⎠⎟⎟⎞

3 光栅化
-
定义屏幕:一个数组
-
raster (德语)屏幕
-
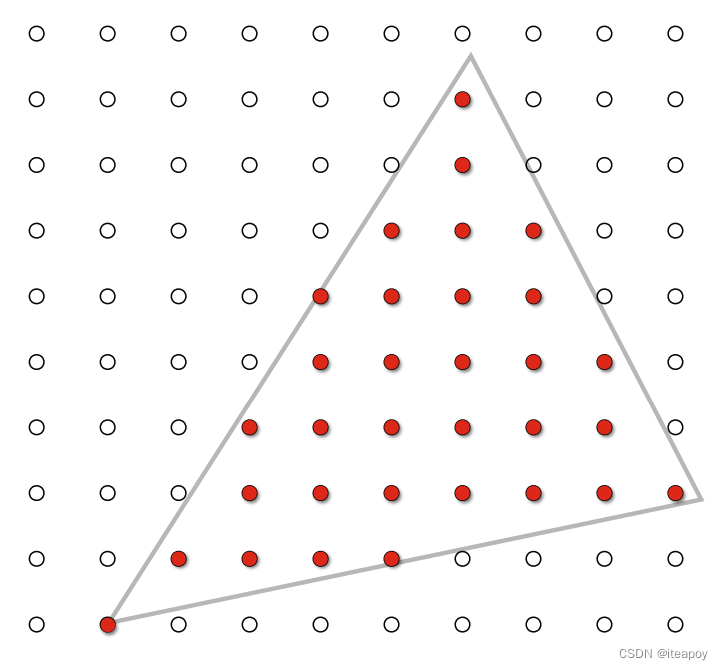
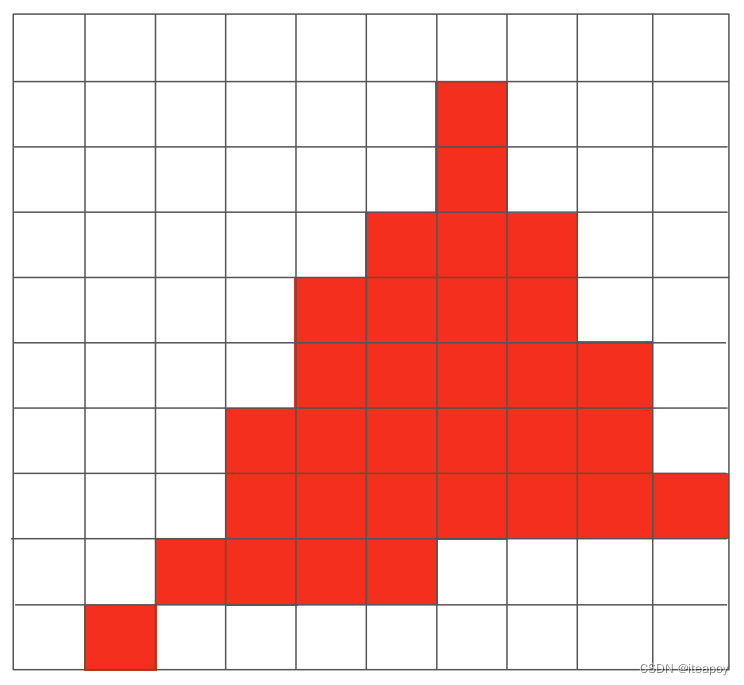
光栅化:把图画到平面上
-
假设点是小方块,颜色是均匀分布的
-
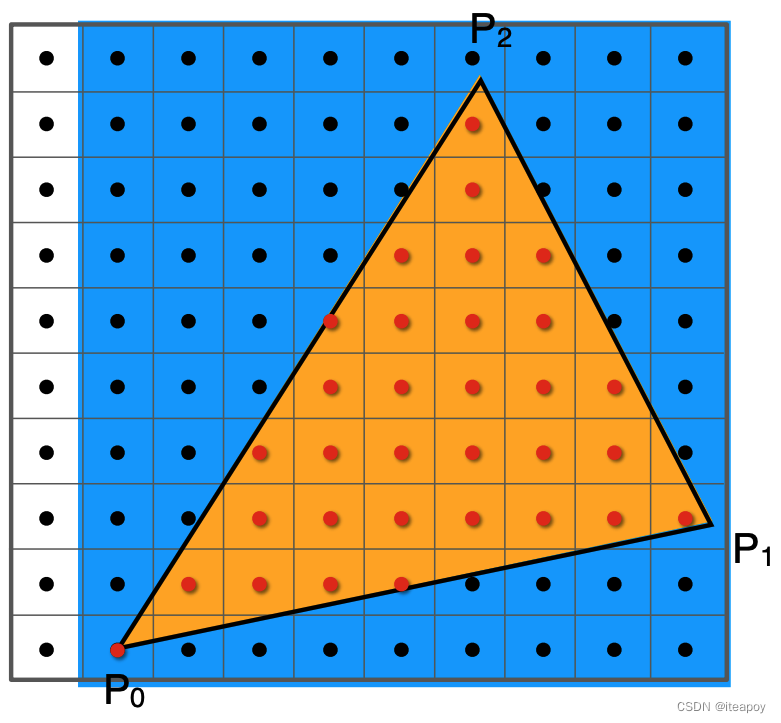
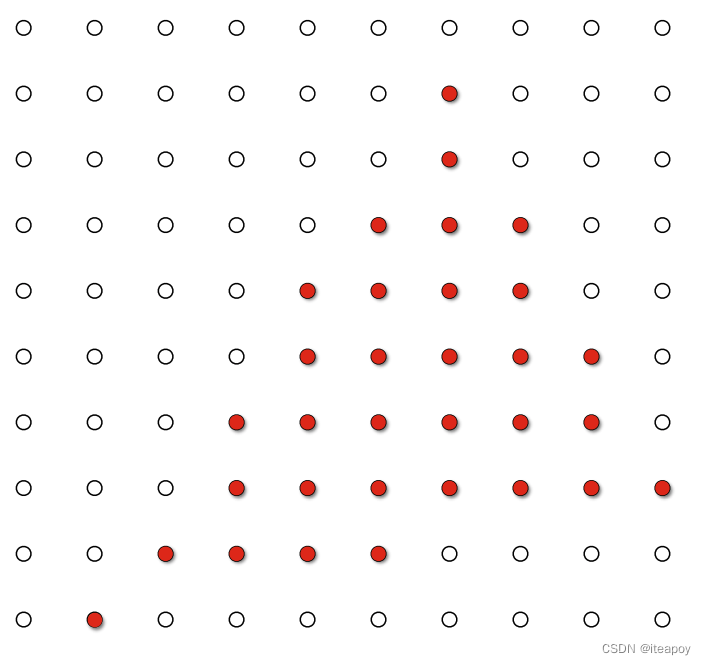
用三角形来表示物体
-
光栅化的优化
-
考虑全部的点
-
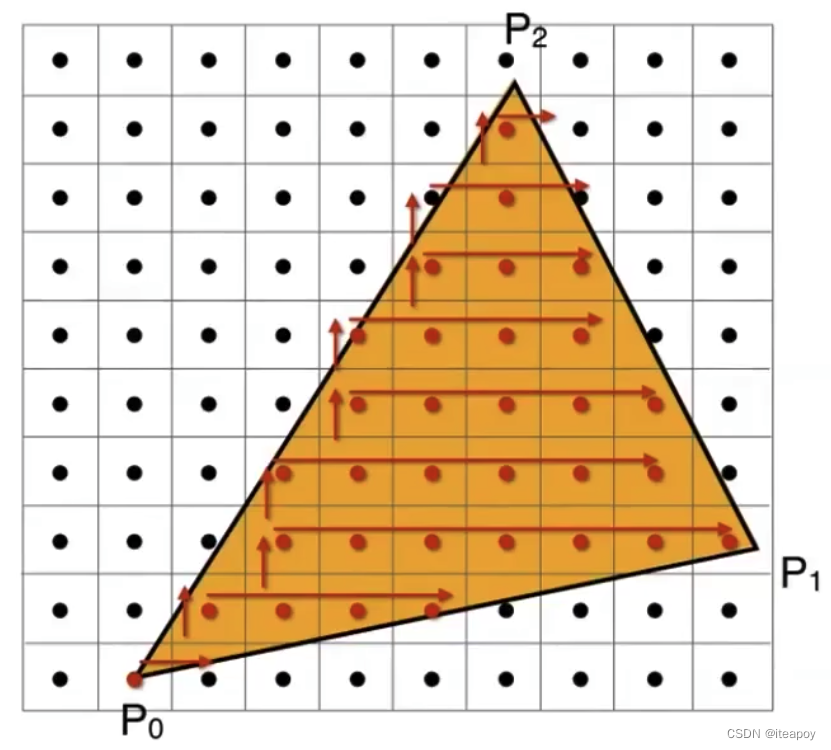
考虑轴向包围盒内的点(axis-aligned bounding box, AABB)
-
每一行看最小到最大的点
-
-
在绿色上有更多的感光元件(人眼对绿色更敏感)
锯齿问题
- 又名:走样 aliasing
- 信号的采样率不够
-
采样导致的问题:
- 锯齿(空间中的采样)
- 摩尔纹(空间中的采样,删除偶数行和偶数列)
- 车轮倒转(时间中的采样)
-
原因:
- 信号变化太快
- 采样太慢,跟不上变化的速度
抗锯齿
-
又名:反走样 antialiasing
-
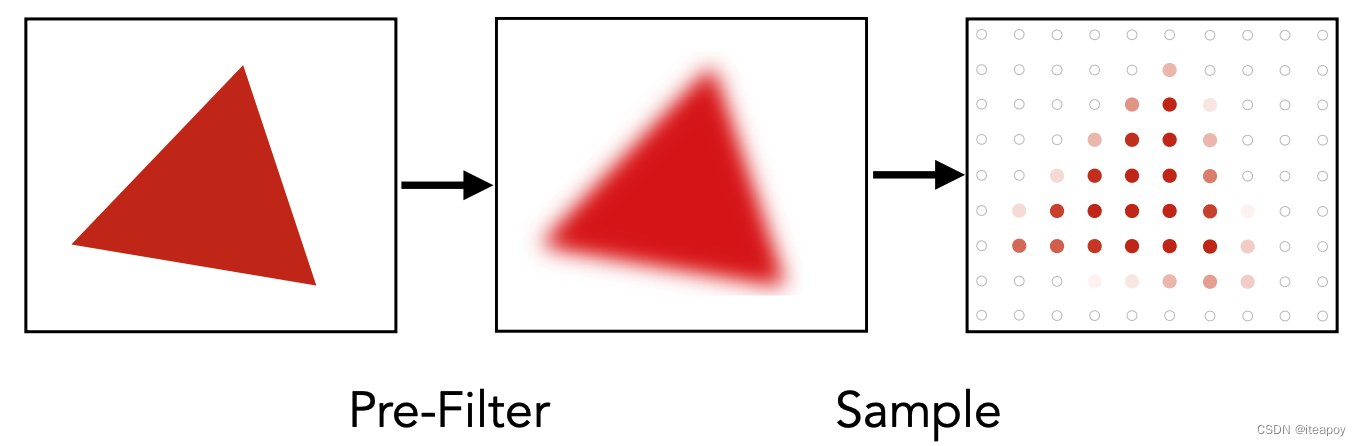
如何减少走样误差:
- 方法一:增加采样率
- 方法二:先模糊(滤波)再采样( vs. blurred aliasing 先采样再模糊)
-
-
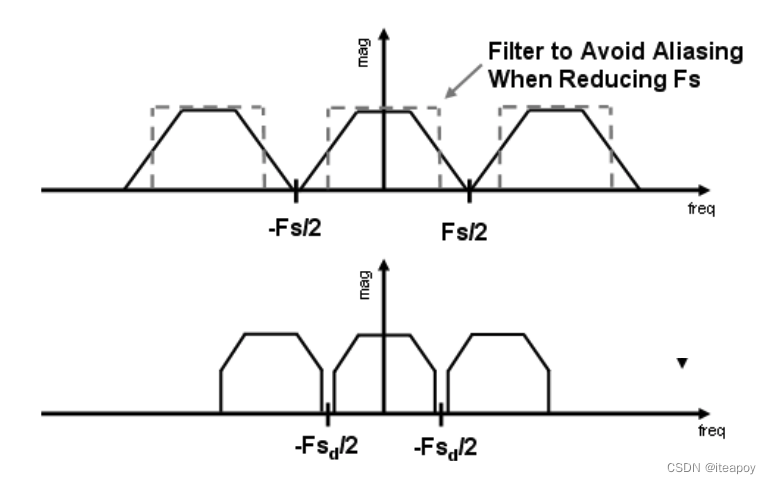
先模糊,再采样这种操作的解释:
- 从傅立叶频谱上来看,原本因为采样慢而在频谱上重叠的块,因为模糊,而被裁剪掉了一部分,然后采样就不会重叠啦!!!
-
MSAA(增加采样率)
-
FXAA
-
TAA(temporal AA)复用上一帧的信息
-
-
vs. 超分辨率
- 低分辨率到高分辨率
滤波
-
滤波
- 删除某段频率后,对应的信号如何变化
-
傅立叶变换
- 把时域变成频域
-
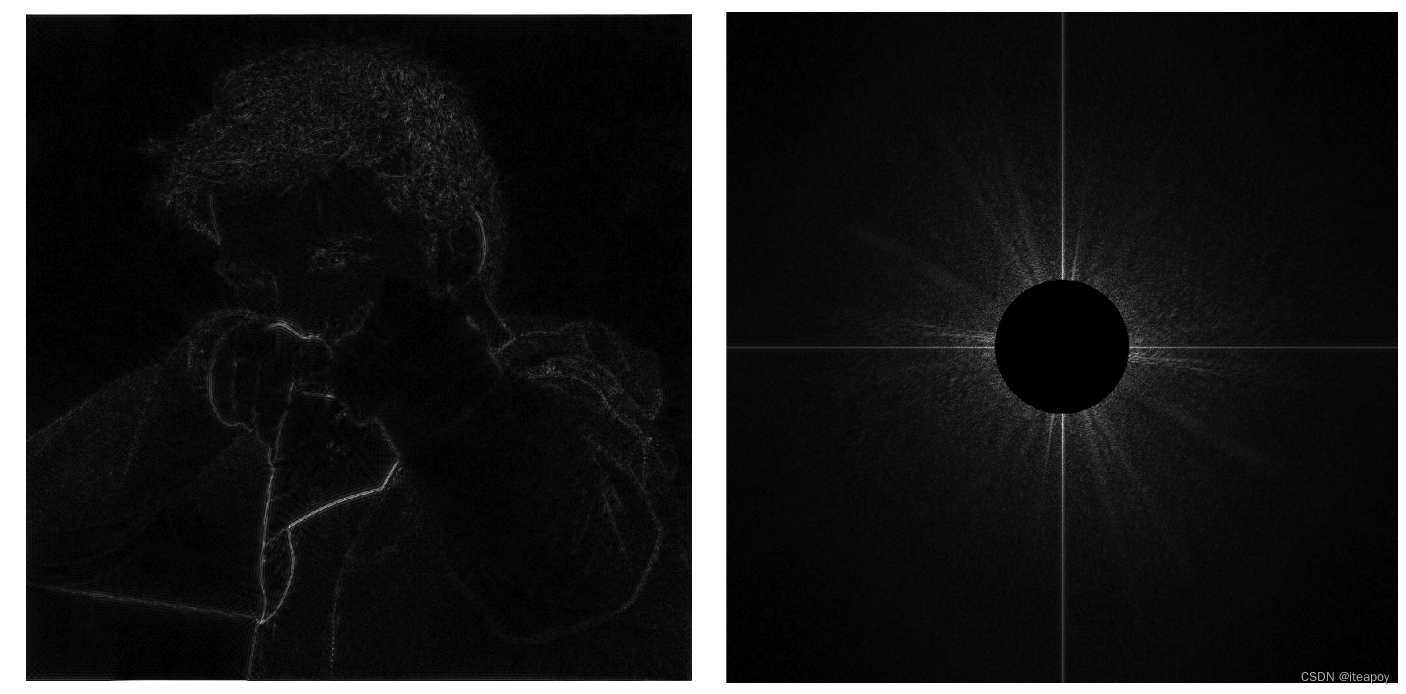
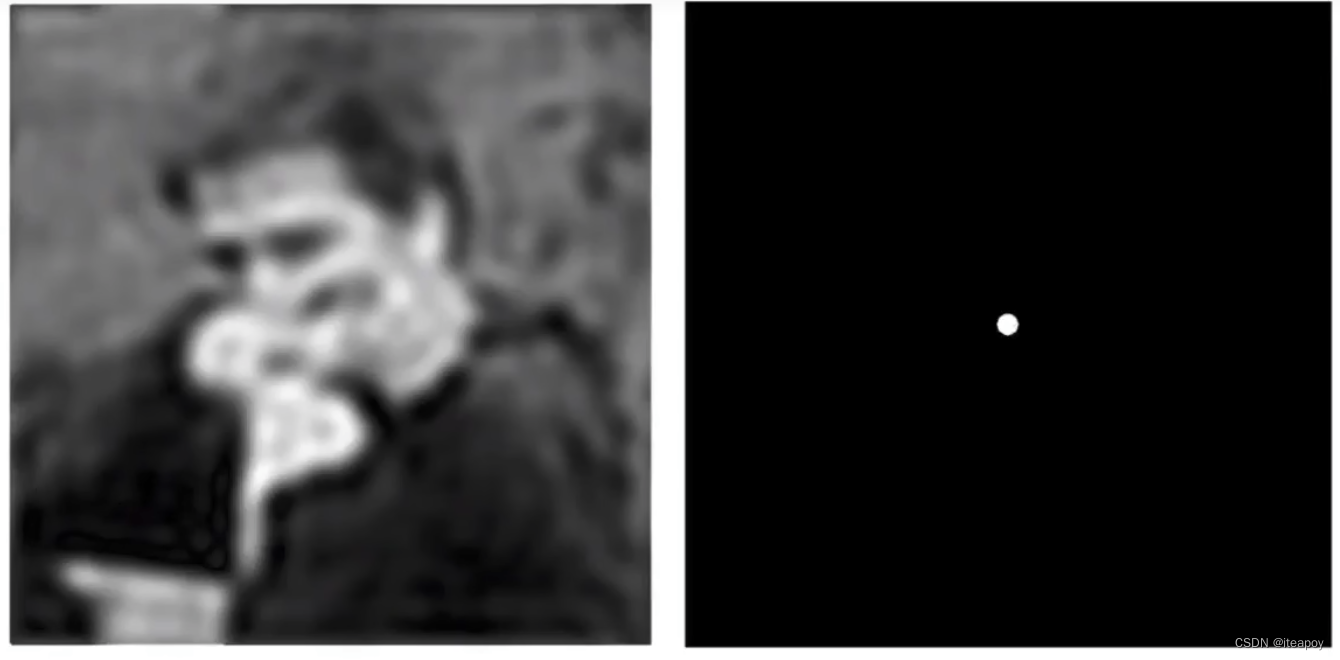
高通滤波(high-pass filter)
-
只有高频信号可以通过,只剩下高频信息,丢掉低频信息
-
-
只剩下边界
-
-
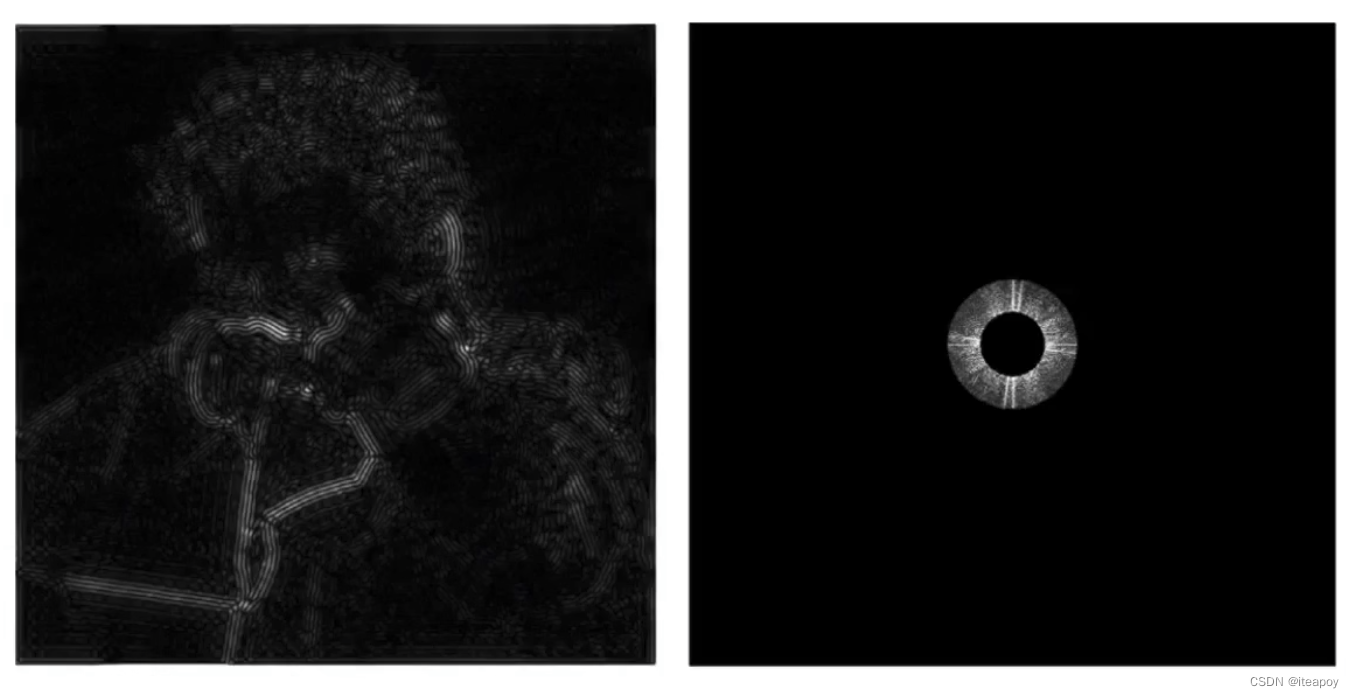
低通滤波(low-pass filter)
-
只有低频信号可以通过,只剩下低频信息,丢掉高频信息
-
-
丢掉边界
-
-
过滤掉最高频和最低频
-
-
频域上的分析
-
-
滤波 (= 平均)= 卷积
- 时域的卷积 = 频域的乘积
- 选择1:
- 时域上做卷积
- 选择2:
- 转换到频域(傅立叶变换)
- 乘上卷积的傅立叶变换
- 转换回时域(逆傅立叶变换)
深度测试 Z-buffer
-
解决的问题:
- 可见性 / 遮挡
-
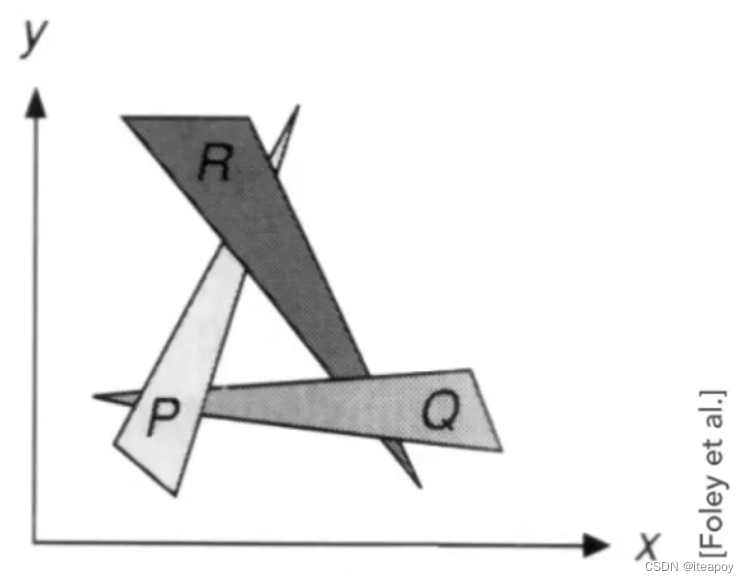
画家算法
- 顺序:从远到近覆盖
- 先画远的物体,再画近的物体覆盖住远处的东西
- 需要按深度排序 O ( n log n ) O(n\log n) O(nlogn)( n n n个三角形)
- 存在问题:
- 不确定的覆盖关系,互相遮挡(形成环)
-
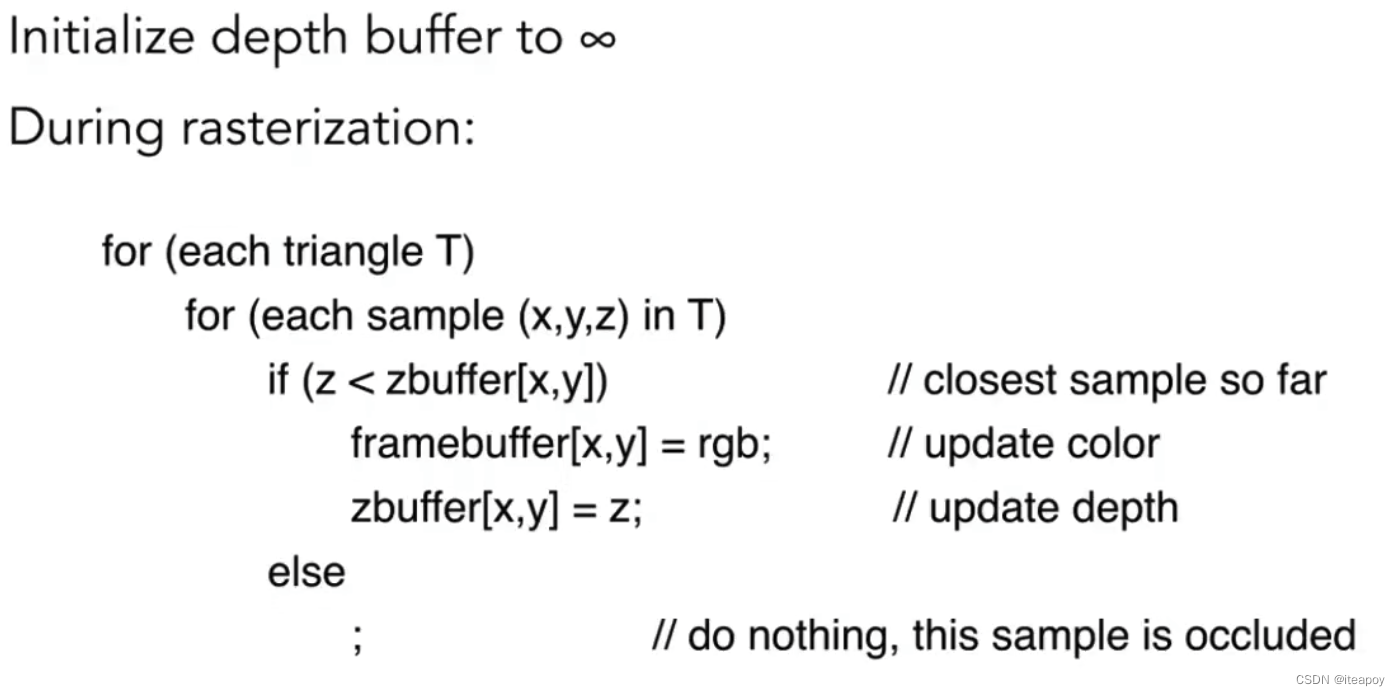
Z-buffer
- !!! 重要:假设离我们近的z更大,离我们远的z更小
- 对每个像素,记录 min(z-value) 的深度
- 需要两个buffer
- frame buffer:存颜色
- depth buffer:存深度
- 时间复杂度: O ( n ) O(n) O(n)(n个三角形)
- 一个问题:
- 对于msaa来说,z-buffer不一定是对像素点,而是对采样点
-
伪代码
-
处理不了透明物体的深度






![[激光原理与应用-53]:《激光焊接质量实时监测系统研究》-4-激光焊接系统软件设计](https://img-blog.csdnimg.cn/61218c58769a4948be184f50b294810f.png)