个人对哈希数据结构学习总结 -- 理论篇
- 引言
- 哈希表设计思考
- 哈希冲突
- Hash Functions
- 冲突解决
- 开放地址法(Open Addressing)
- 分离链表法(Separate Chaining)
- Two-way Chaining
- Dynamic Hash Tables
- chained Hashing
- extendible hashing
- linear hashing
- 说明
- spiral storage
- 使用场景
- 小结
引言
哈希表这个数据结构相信各位都不陌生,无论是高级语言,还是各大数据库底层实现都不离开它,所以本文我想来聊聊我个人对哈希表的一些看法,同时也是对哈希表这个知识点做一次系统性的梳理和总结。
本文主要会分为两大部分:
- 哈希表设计思考(偏理论)
- 最佳实践(结合Java,Go,redis等热门技术来谈谈其中使用到的哈希设计原则)
哈希表设计思考
对于哈希表这个数据结构而言,有这样四个维度的指标是我们需要考虑的:
- 所有数据集合 S
- 哈希表存储的数据集合 U
- 所有哈希桶的下标集合 R
- 映射函数 h
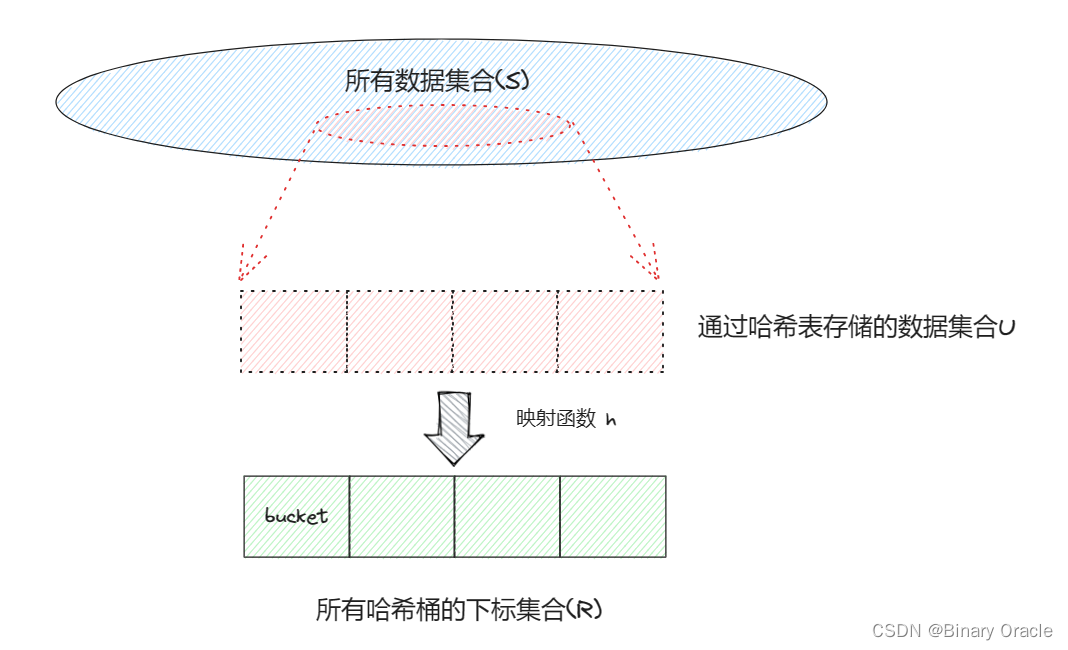
S的大小一般远大于R,但是哈希表存储的数据集合 U 与 R 大小相差不会太大;如果存在 x!=y && h(x) == h(y) ,则称x与y冲突。
如果h可以将U单射到R上,那么我们称这种情况为完美哈希(perfect hashing) , 并且如果此时U的大小与R的大小相等,则称此种情况为最小完美哈希(minimal perfect hashing)。
如果U的大小是固定的并且预先可知,那么称这种情况为静态哈希表,否则称之为动态哈希表。
哈希冲突
解决哈希冲突有两个着眼点:
- 在冲突没发生前尽量避免冲突,在冲突发生后解决冲突
Hash Functions
要避免冲突,我们需要从哈希函数h这个维度下手:
- 对于静态哈希表,我们总是可以找到一个h来达成最小完美哈希
- 对于动态哈希表,由于集合U是不可控的,所以我们的思路是尽可能减少冲突发生,也就是选择一个尽可能少冲突的哈希函数h
关于如何设计一个完美的哈希函数并不是本文重点,但是比较出名的哈希函数有以下这些,大家可以自行查阅资料了解各自适用场景:
- MurmurHash (2008)
- Google CityHash (2011)
- Google FarmHash (2014)
- CLHash (2016)
冲突解决
动态哈希表很难达成完美哈希的情况,因此我们必须考虑如何解决发生的哈希冲突,常见的冲突解决策略有:
- 开放地址法(Open Addressing)
- 分离链表法(Separate Chaining)
- Two-way Chaining
开放地址法(Open Addressing)
开放地址法(Open Addressing)下面又细分了好几种策略:
- 线性探测法(Linear Probing):发生哈希冲突时,将会在哈希表中线性地往后查找,直到找到一个空槽来插入元素或执行查找操作。
- 这种方法可能导致聚集(clustering)现象,即冲突的元素会聚集在一起,影响性能。
- 二次探测法(Quadratic Probing): 发生冲突时,会使用二次函数来计算下一个探测位置,以尝试寻找下一个空槽或者目标元素。
- 这种方法相对于线性探测法来说,能够更均匀地分散元素,但仍然可能会出现二次探测路径相交的情况。
- 双重散列(Double Hashing):双重散列使用两个哈希函数,当发生冲突时,首先使用第一个哈希函数得到一个偏移量,然后在第二个哈希函数的值处查找下一个位置。
- 这个方法可以有效地减少聚集问题,但需要选择合适的哈希函数和冲突解决策略。
其中 Linear probing 由于对缓存友好,性能最高,比较常用。Linear probing 可能带来冲突聚集的情况,为了避免这一现象,有时也会使用 Quadratic probing 策略。使用 Quadratic probing 也会遇到一些恶意操作或者特定的输入数据,从而导致性能下降或其他问题,因此有时也会使用 Double hashing 配合 Universal hashing 获得更好的效果。
1.“线性探测对缓存友好” 指的是线性探测法在某些情况下能够更好地利用计算机的缓存机制,从而在内存访问方面表现较好。这主要是因为线性探测法在哈希冲突时,会沿着一个连续的内存地址序列进行探测,这有助于提高数据的局部性,从而更好地适应现代计算机的缓存体系结构。
2.通用哈希(Universal hashing)的主要思想是,从一组可能的哈希函数中随机选择一个函数来哈希每个键,这样可以使得不同的键在不同的哈希函数下分布,减少冲突的概率。
Robin Hood Hashing:
- Linear Probe Hashing 的变种,为了防止 Linear Probe Hashing 出现连续区域导致频繁的 probe 操作。基本思路是 “劫富济贫”,即每次比较的时候,同时需要比较每个 key 距离其原本位置的距离(越近越富余,越远越贫穷),如果遇到一个已经被占用的 slot,如果它比自己富余,则可以直接替代它的位置,然后把它顺延到新的位置。
- Robin Hood Hashing 也是为了解决线性探测法冲突聚集的问题
这样做的好处是什么呢?最大的好处就是各个键值对离自己的理想位置的距离变得“均衡”了,或许对查询的平均时间复杂度有一定的优化,但是一定复杂化了插入操作的时间复杂度。
实际上,经过实验发现,这种方法的效率不如线性探测法,不过这种方法的思想还是很有价值的。
分离链表法(Separate Chaining)
开放地址法(Open Addressing) 在装载因子较高时性能会急剧下降,为了应对这一情况,也常使用 Separate Chaining 策略。Separate Chaining 一般使用链表,有时也会使用查找树结构。
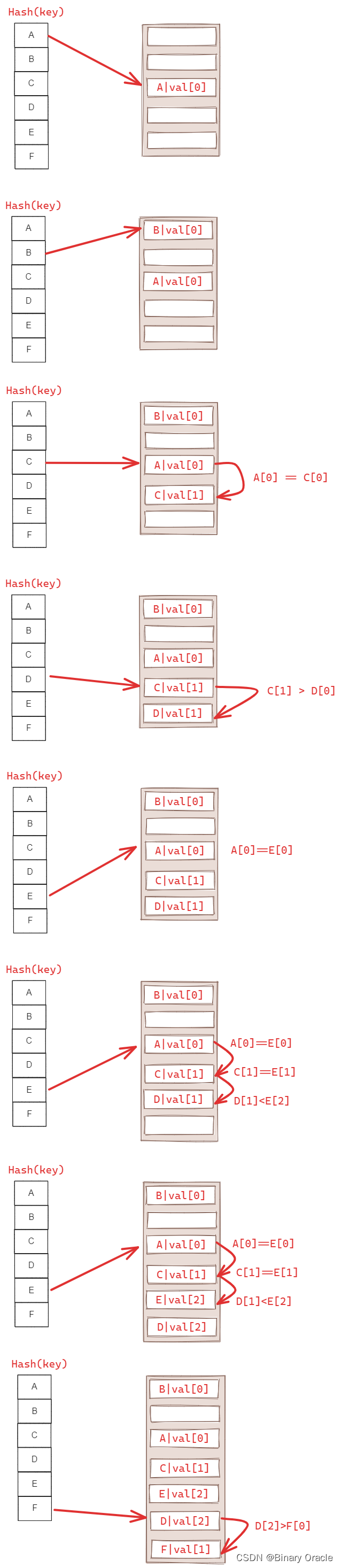
Two-way Chaining
Two-way Chaining 就像是 Double hashing,区别在于 Double hashing 使用一个哈希表,而 Two-way Chaining 使用两个哈希表 T1 和 T2。在插入时,T[h1(x)] 和 T[h2(x)] 中哪个装载的元素更少,就插入到哪儿。查找时需要访问两个哈希表。
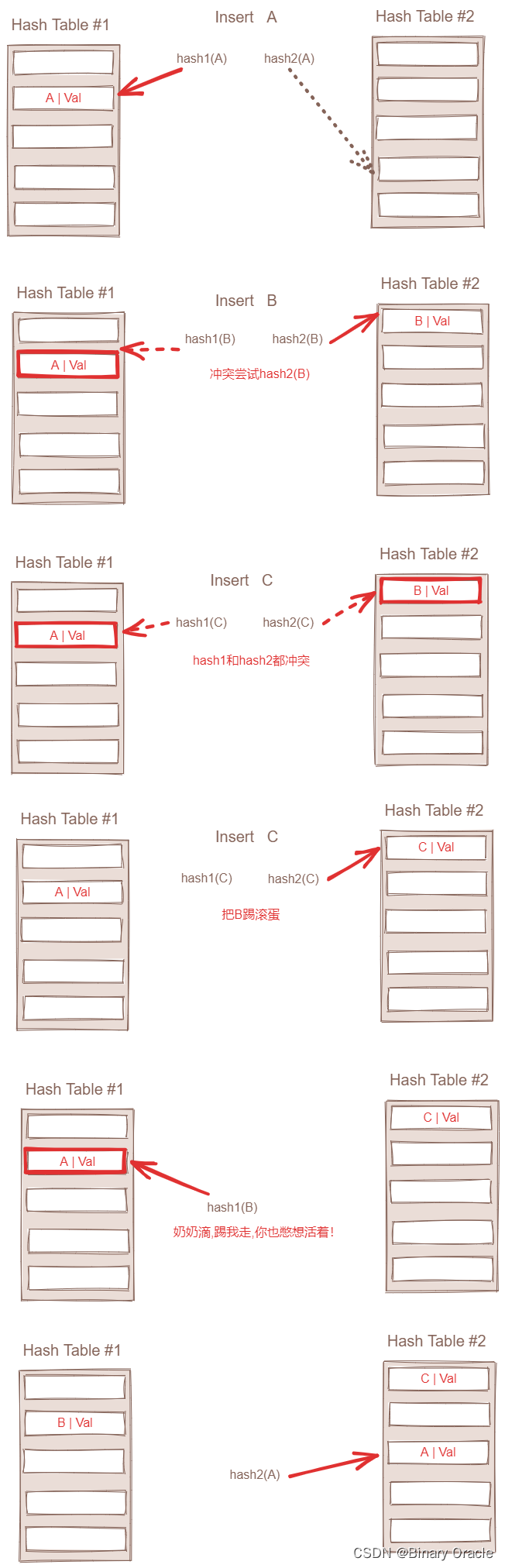
还有一种和Two-way Chanining思想类似的算法Cuckoo Hashing (布谷鸟哈希) ,要理解该算法,我们首先需要理解布谷鸟的行为,这也是算法的核心:
- 布谷鸟妈妈从不筑巢,它将自己的鸟蛋生在其他鸟类的巢穴里,要别的鸟给它孵蛋
- 新出生的布谷鸟会本能地将巢穴里的其他蛋踢开(kick out ),推出鸟巢,以确保自己在鸟巢里可以独享宠爱
布谷鸟哈希有几种变种,下面介绍一个哈希桶和两个哈希函数的版本:
-
Insert
- 若值x已存在哈希表中,则直接返回
- 若insert后哈希表空间会不够,则先进行扩容,再rehash,再继续3、4、5
- 用哈希函数h1(x)计算出下标i1,当bucket[i1]为空时,说明鸟巢可用,插入x
- 若bucket[i1]非空,用新值x将bucket[i1]上的老值x’踢开(kick out),对应小布谷鸟将老蛋踢出巢穴,老蛋当然也不能坐以待毙,继续kick out别的蛋,老值x’的下一个位置用哈希函数h2(x)寻找
- 重复2,直到达到最大循环次数MaxLoop(插入失败);或者所有被踢开的值都找到新位置(插入完成)
-
lookup
- 查找逻辑非常简单,去可能的两个巢穴里寻找,即去下标h1(x)和h2(x)寻找,若没有匹配上,则不存在
(从这里可以发现查找是非常快的,且时间复杂度稳定是O(1))
- 查找逻辑非常简单,去可能的两个巢穴里寻找,即去下标h1(x)和h2(x)寻找,若没有匹配上,则不存在
下图展示的是两个哈希函数,两个哈希桶的版本:
为了防止我们不会陷入一个无限循环中,一旦我们发现了一个死循环或者达到最大循环次数,我们就需要对现有的hash table进行扩容:
- 如果使用两个hash function,那么我们大概只需要当hash table达到50%容量左右时,才需要进行扩容重建
- 如果使用三个hash function,那么我们大概需要当hash table达到90%容量的左右时,才需要进行扩容重建
Dynamic Hash Tables
随着哈希表的装载因子上升,哈希冲突的概率会不断上升,直到装载因子超过 1 时,必然发生哈希冲突。对于动态哈希表,由于U 的大小不能预先得知,所以必然需要动态调整哈希表的大小。常见的策略:
- 当装载因子超过某一阈值后,线性扩展哈希表的大小为原来的若干倍
- 当装载因子低于某一阈值时,线性收缩哈希表的大小为原来的若干分之一
使用两个阈值的原因是为了避免抖动。
由于R发生变化,对应的哈希函数也必须发生变化,同时分配一个块更大的内存,将原哈希表中所有元素rehash到新的哈希表中,这种策略称为Copy All策略,该策略的坏处就是会产生较长时间的停顿,因此下面来介绍几种改进的策略:
- Chained Hashing
- extendible hashing
- linear hashing
- spiral storage
哈希表不能够均匀地增长,其根本原因在于 rehash,只要能够不 rehash 但是调整 R,就可以解决这一问题。
chained Hashing
Chained Hashing 是 Dynamic Hash Tables 的 HelloWorld 实现,每个 key 对应一个链表,每个节点是一个 bucket,装满了就再往后挂一个 bucket。需要写操作时,需要请求 latch:
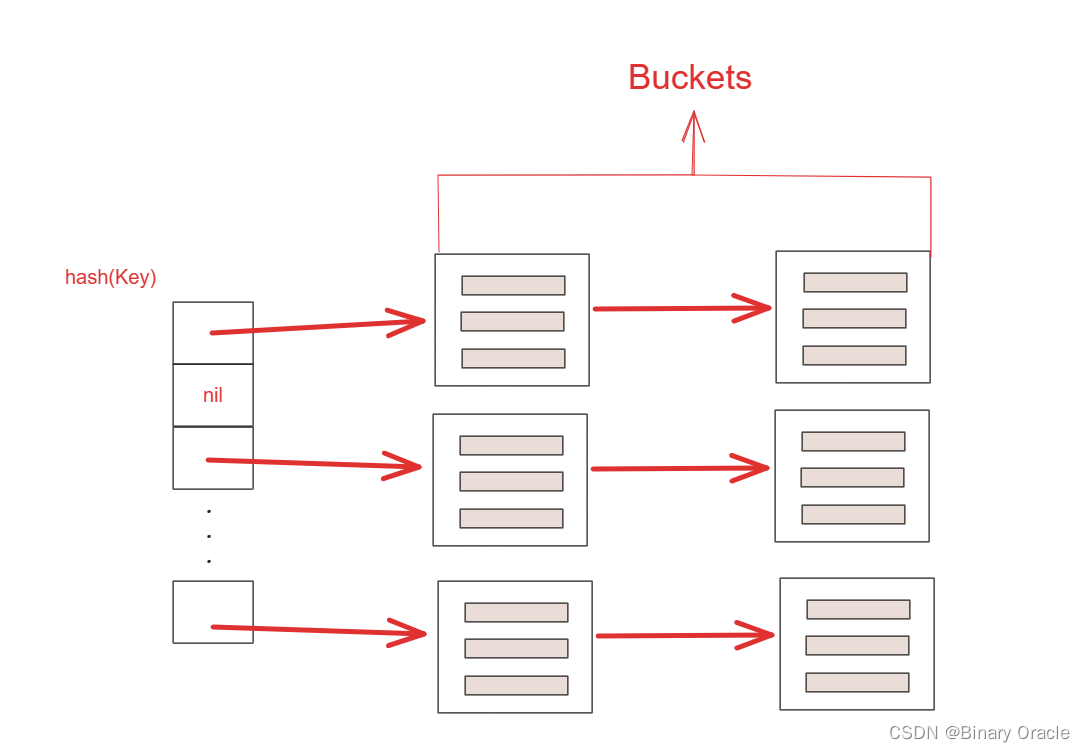
- 在查找元素时,根据元素的哈希键计算出对应的槽位,并遍历该槽位的链表桶,搜索具有相同哈希键的元素
- 对于插入和删除操作,也可以看作是查找操作的一般化。在插入元素时,需要进行查找并确定插入位置;在删除元素时,也需要查找并删除相应元素
这么做的好处就是简单,坏处就是最坏的情况下 Hash Table 可能降级成链表,使得操作的时间复杂度降格为 O(n)。
当然,如果桶中只有一个元素,那么可以将其视为链表,可以在链表长度到达指定阈值后,变成二叉查找树,提升查询效率。并且当负载因子达到指定阈值后,可以对哈希表进行扩容,此时如果不考虑性能,可以采用copy all策略,如果考虑性能,可以考虑渐进式扩容策略。
extendible hashing
在Chained Hashing中,一种可行的方法是在链表变得过长时,将桶(bucket)进行分割,而不是让链表无限增长。这种方法可以避免链表过长导致的性能问题,并且需要进行分割时,只需要对特定的桶进行重新分配。
可扩展哈希方式包含一个slot数组和一系列的buckets,每个slot中保存对应bucket的指针。对于slot数组有一个全局bit位,记录在这个哈希表中需要多少位才能找到对应bucket,对于每一个bucket,有一个本地bit位,记录找到本地的bucket需要多少位。
extendible hash像一种结合hash与redix(前缀树)的技术的哈希方法
Extendible Hashing 的基本思路是一边扩容,一边 rehash,如下图所示:
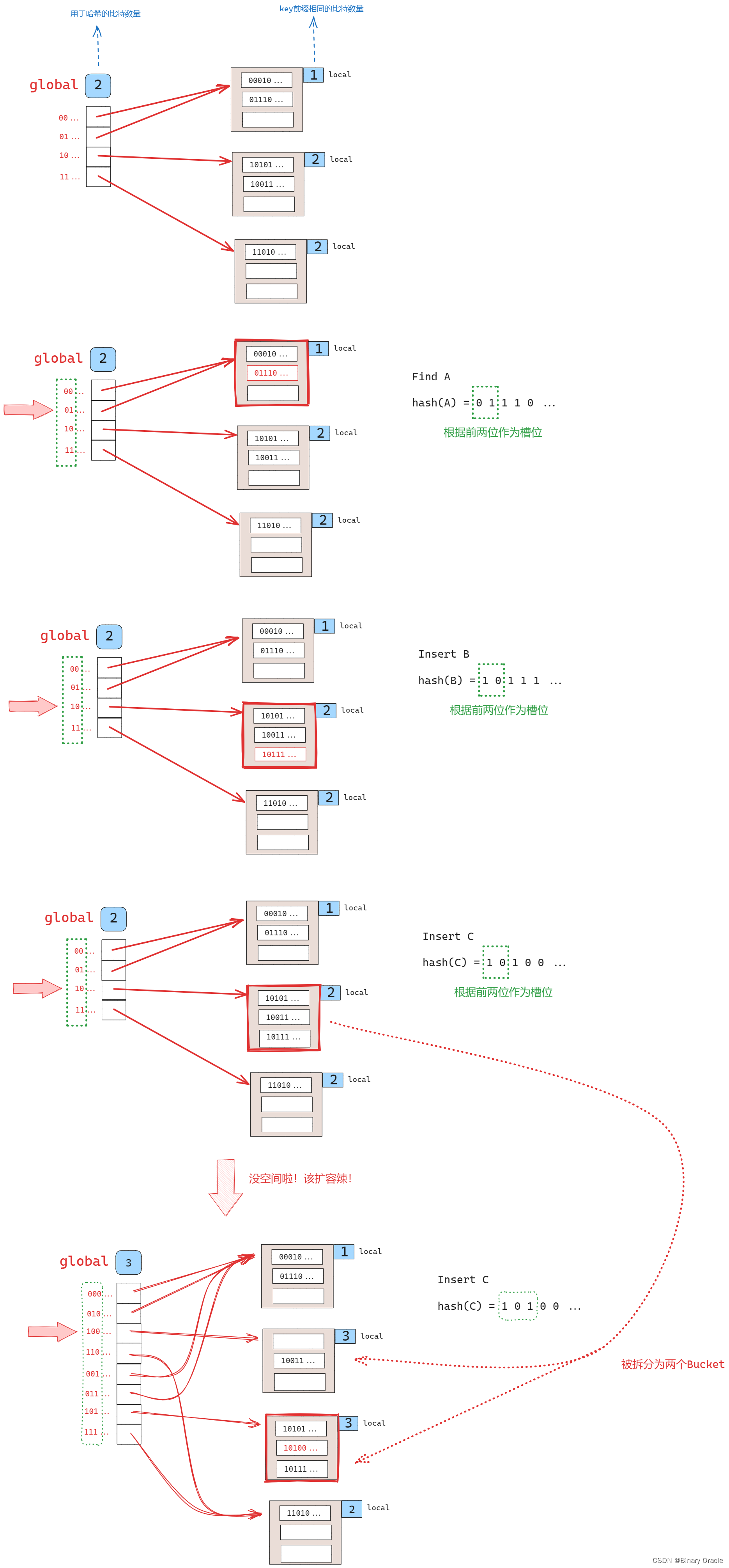
可拓展哈希允许插入哈希值相同的记录。所以当插入4条哈希值一样的记录,一个桶就一定放不下(假设桶的容纳上限是3条)。这种情况被叫做overflow,而解决方法是用指针指向overflow bucket,也就是人为增加桶。这种方式看上去不美,也暴露了可拓展哈希的局限性,但一个方法在实际应用中确实无法确保永远的统一性,总是会需要“补丁”。实际应用中,可拓展哈希也不是最普遍的方法,更多则是B-Tree。
linear hashing
本部分参考文章
线性哈希是可扩展哈希的改进,可扩展哈希有一个小的性能瓶颈,在bucket分裂且需要扩展slot array时,需要对整个slot array加锁直到bucket分裂完成。为了解决这个问题,提出了线性哈希方式。哈希表维护一个指针,指向下一个准备分裂的bucket,并且线性哈希采用多个哈希函数来寻找正确的bucket。
线性哈希的数学原理:
- 假定key = 5 、 9 、13
此时所有 key % 4 = 1
- 现在我们对8求余
5 % 8 = 5
9 % 8=1
13 % 8 = 5
由上面的规律可以得出
- (任意key) % n = M
- (任意key) %2n = M或 (任意key) %2n = M + n
线性哈希的具体实现如所示:
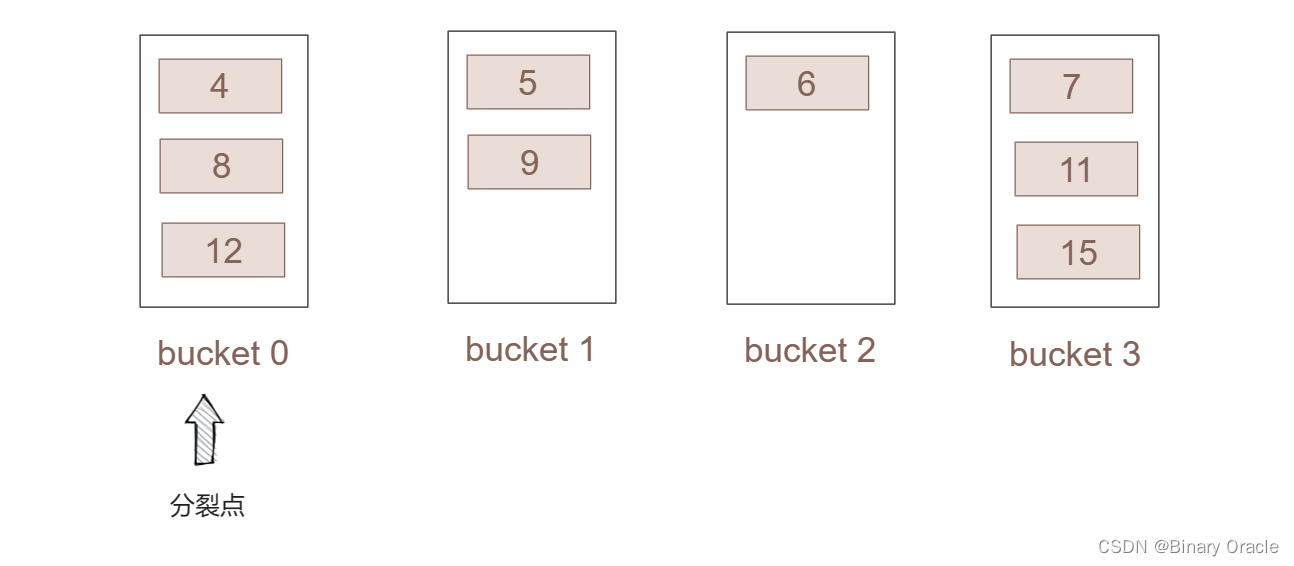
- 我们假设初始化的哈希表如下:
为了方便叙述,我们作出以下假定:
- 为了使哈希表能进行动态的分裂,我们从桶0开始设定一个分裂点。
- 一个桶的容量为listSize = 3,当桶的容量超出后就从分裂点开始进行分裂。
- hash函数为 h0 = key %4 h1 = key % 8,h1会在分裂时使用。
- 整个表初始化包含了4个桶,桶号为0-3,并已提前插入了部分的数据。
分裂过程如下:
现在插入key = 27
-
进行哈希运算,h0 = 27 % 4 = 3
-
将key = 27插入桶3,但发现桶3已经达到了桶的容量,所以触发哈希分裂
-
由于现在分裂点处于0桶,所以我们对0桶进行分割。这里需要注意虽然这里是3桶满了,但我们并不会直接从3桶进行分割,而是从分割点进行分割。这里为什么这么做,在下面会进一步介绍。
-
对分割点所指向的桶(桶0)所包含的key采用新的hash函数(h1)进行分割。
对所有key进行新哈希函数运算后,将产生如下的哈希表:
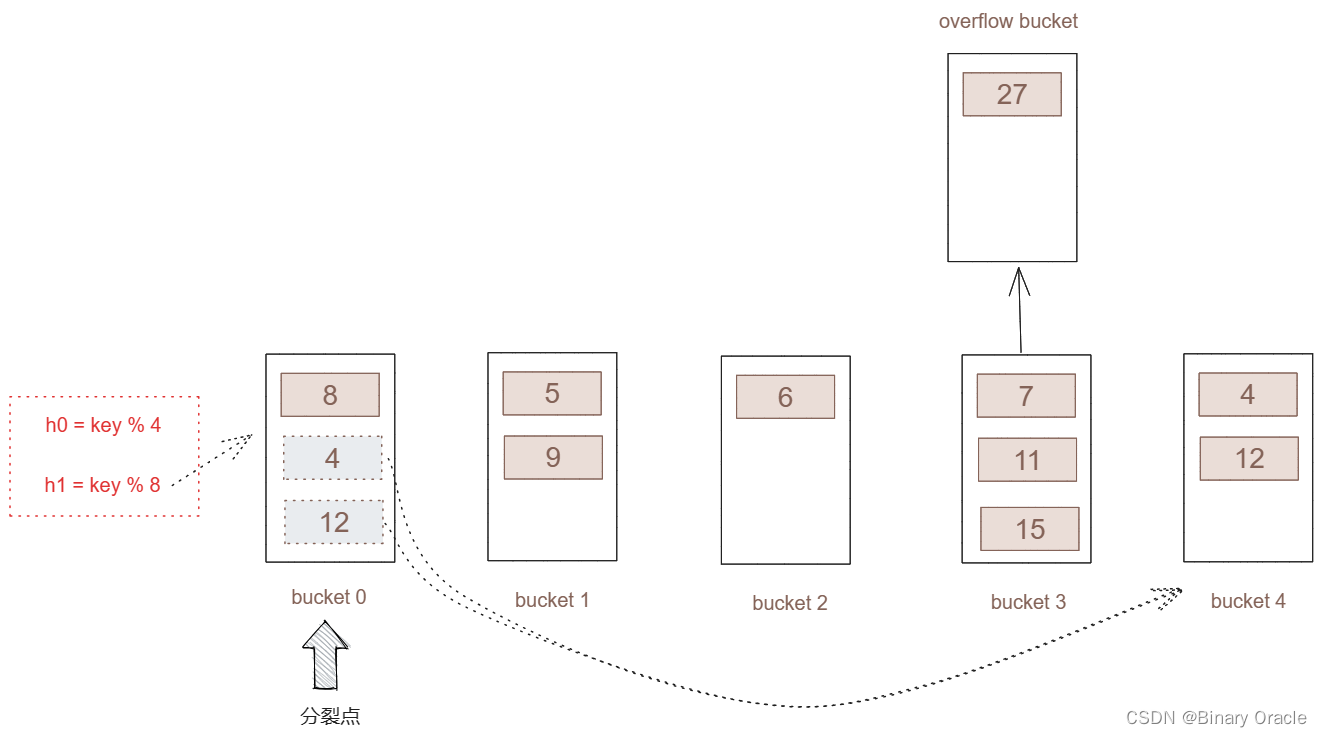
- 虽然进行了分裂,但桶3并不是分裂点,所以桶3会将多出的key,放于溢出桶.,一直等到桶3进行分裂。
- 进行分裂后,将分裂点向后移动一位。
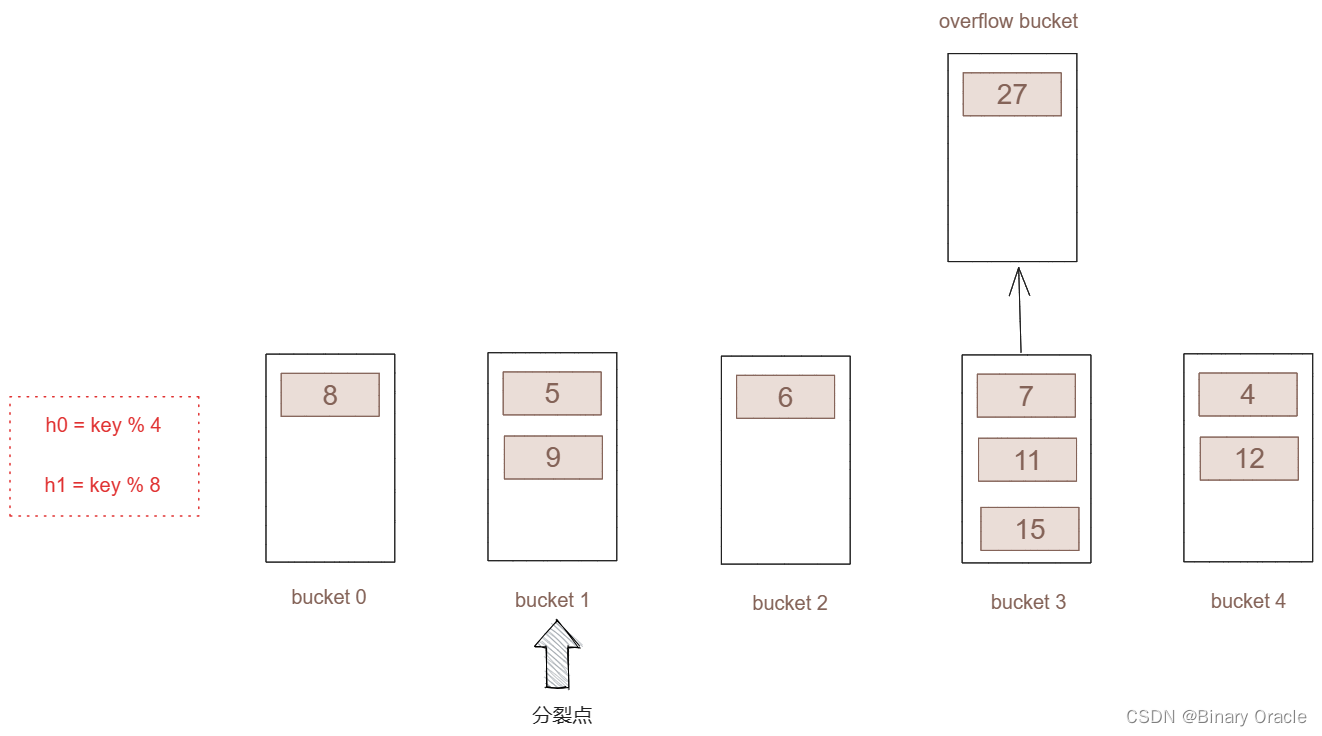
- 一次完整的分裂结束
key的读取:
- 采用h0对key进行计算。
- 如果算出的桶号小于了分裂点,表示桶已经进行的分裂,我们采用h1进行hash运算,算出key所对应的真正的桶号。再从真正的桶里取出value
- 如果算出的桶号大于了分裂点,那么表示此桶还没进行分裂,直接从当前桶进行读取value。
说明
-
如果下一次key插入0、1、2、4桶,是不会触发分裂(没有超出桶的容量), 如果是插入桶3,用户在实现时可以自己设定,可以一旦插入就触发,也可以等溢出桶达到listSize再触发新的分裂。
-
现在0桶被分裂了,新数据的插入怎么才能保证没分裂的桶能正常工作,已经分裂的桶能将哪部分插入到新分裂的桶呢?
-
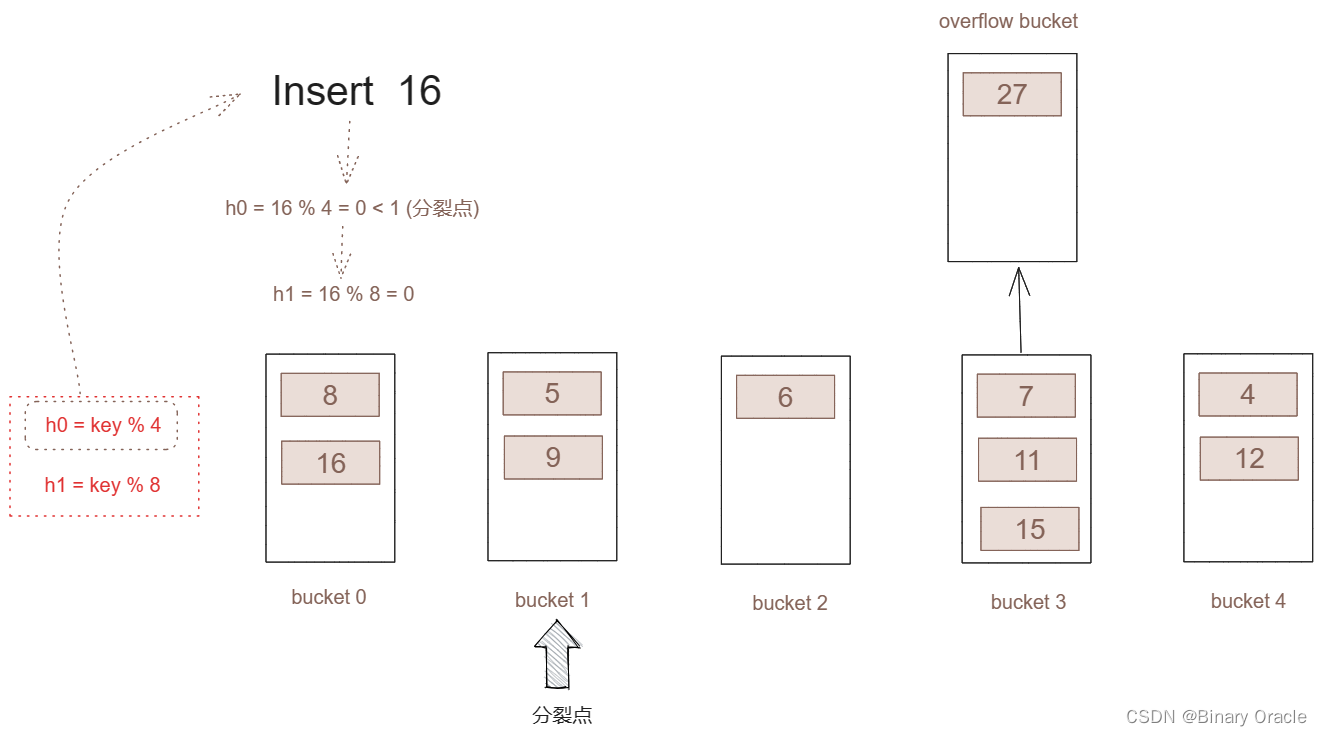
只要分裂点小于桶的总数,我们依然采用h0函数进行哈希计算。
-
如果哈希结果小于分裂号,那么表示这个key所插入的桶已经进行了分割,那么我就采用h1再次进行哈希,而h1的哈希结果就这个key所该插入的桶号。
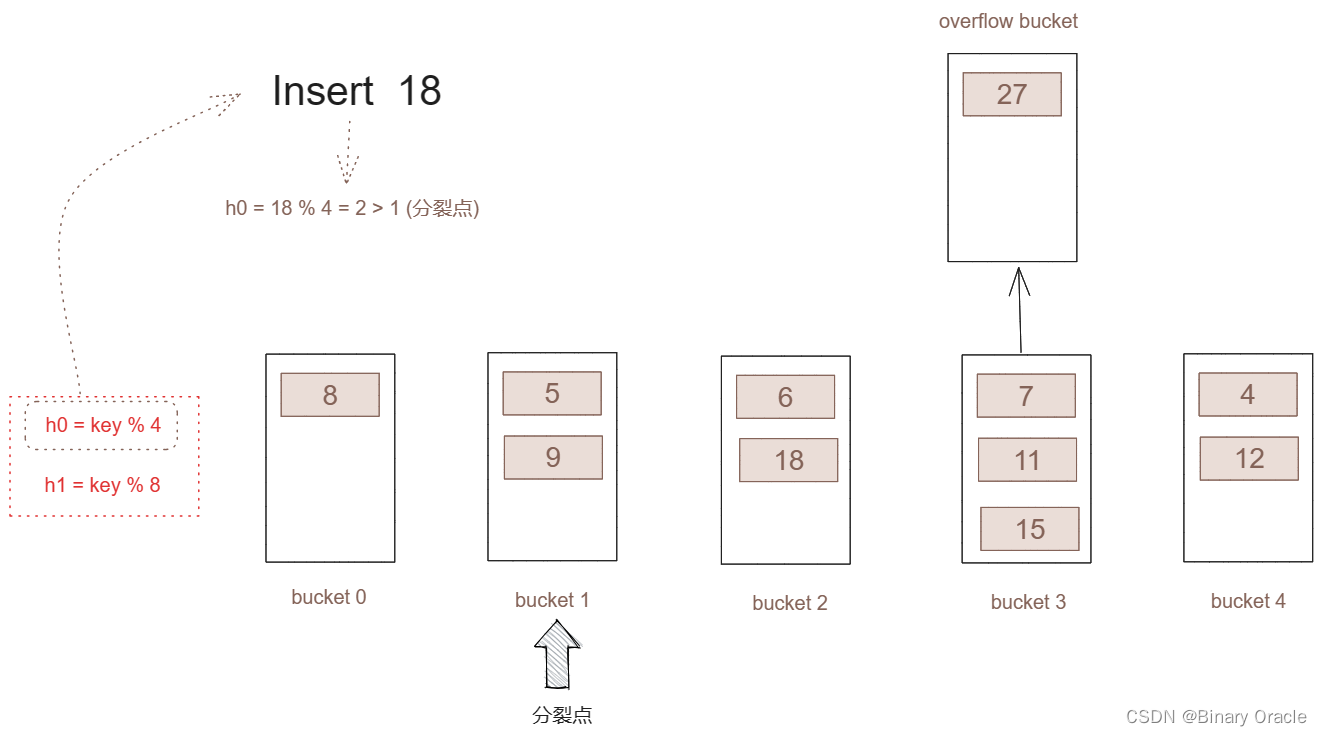
-
如果哈希结果大于分裂号,那么表示这个key所插入的桶还没有进行分裂。直接插入。
-
这也是为什么虽然是桶3的容量不足,但分裂的桶是分裂点所指向的桶。如果直接在桶3进行分裂,那么当新的key插入的时候就不能正常的判断哪些桶已经进行了分裂。
-
-
如果使用分割点,就具备了无限扩展的能力。当分割点移动到最后一个桶(桶3)。再出现分裂。那么分割点就会回到桶0,到这个时候,h0作废,h1替代h0, h2(key % 12)替代h1。那么又可以开始动态分割。那个整个初始化状态就发生了变化。就好像没有发生过分裂。那么上面的规则就可以循环使用。
-
线性哈希的论文中是按上面的规则来进行分裂的。其实我们可以安装自己的实际情况来进行改动。
假如我们现在希望去掉分割点,一旦哪个桶满了,马上对这个桶进行分割。
可以考虑了以下方案:
-
为所有桶增加一个标志位。初始化的时候对所有桶的标志位清空。
-
一旦某个桶满了,直接对这个桶进行分割,然后将设置标志位。当新的数据插入的时候,经过哈希计算(h0)发现这个桶已经分裂了,那么就采用新的哈希函数(h1)来计算分裂之后的桶号。在读取数据的时候处理类似。
采用此种方案实现的LinerHash简易代码如下所示:
/**
* lineHash简单实现模型
*/
public class LineHash {
/**
* 单桶最多容纳元素个数
*/
public final int bucketMaxSize;
/**
* 分裂点索引
*/
public int overPoint = 0;
/**
* 每一轮的哈希桶数组初始大小
*/
private int initSize;
/**
* 哈希桶数组
*/
public Bucket[] buckets;
public LineHash(int bucketMaxSize) {
this.bucketMaxSize = bucketMaxSize;
// 初始桶数组大小为4
buckets = new Bucket[4];
initSize = 4;
}
public String get(int key) {
int index = calculateIndex(key);
return buckets[index].get(key);
}
public void put(int key, String val) {
int index = calculateIndex(key);
Bucket bucket = buckets[index];
// 判断当前桶是否满了
if (bucket.size() < bucketMaxSize) {
bucket.put(key, val);
} else {
//满了就进行分裂
bucket.put(key, val);
splitHash();
}
}
private int calculateIndex(int key) {
//根据分裂轮数调用不同的哈希函数
int index = hashFun(key, 1);
//当前桶产生了分裂
if (index < overPoint) {
//采用新的哈希函数进行计算
index = hashFun(key, 2);
}
lazyInitIfNeed(index);
return index;
}
private void lazyInitIfNeed(int index) {
if (buckets[index] == null) {
buckets[index] = new Bucket(bucketMaxSize);
}
}
public int hashFun(int key, int round) {
return key % (initSize * round);
}
public void splitHash() {
// 待分裂的旧桶
Bucket oldBucket = buckets[overPoint];
//分裂产生的新桶
Bucket newBucket = new Bucket(bucketMaxSize);
// 对旧桶中的元素进行rehash
Set<Integer> keySet = oldBucket.keySet();
List<Integer> removeKeyList=new ArrayList<>(oldBucket.size()/2);
keySet.forEach(key -> {
int index = hashFun(key, 2);
// 说明当前key需要被rehash到新桶中
if (index >= buckets.length) {
newBucket.put(key, oldBucket.get(key));
removeKeyList.add(key);
}
});
removeKeyList.forEach(oldBucket::remove);
// 将新桶添加进哈希桶数组中
addBucket(newBucket);
// 分裂点前移
overPoint++;
// 分裂点移动了一轮就更换新的哈希函数
if (overPoint >= initSize) {
initSize = initSize * 2;
overPoint = 0;
}
}
private void addBucket(Bucket newBucket) {
Bucket[] temp = new Bucket[buckets.length + 1];
System.arraycopy(buckets, 0, temp, 0, buckets.length);
temp[buckets.length] = newBucket;
buckets = temp;
}
/**
* 桶
*/
private static class Bucket {
private final Map<Integer, String> map;
private Bucket(int bucketMaxSize) {
this.map = new HashMap<>(bucketMaxSize);
}
public void put(Integer key, String val) {
map.put(key, val);
}
public String get(Integer key) {
return map.get(key);
}
public int size() {
return map.size();
}
public Set<Integer> keySet() {
return map.keySet();
}
public void remove(Integer key) {
map.remove(key);
}
}
}
这段代码逻辑不完全正确,本人目前能力所限,对liner hash理解还不够透彻,如果有大佬有补充,可以在评论区留言。
关于Linear Hashing的更多内容,大家可以阅读论文学习:
- Linear Hashing Paper
spiral storage
Spiral Storage 总是将负载更多的放在哈希表靠前的位置上,而非均匀地将负载分配到整个哈希表中。这样尽管是像 Linear Hashing 一样,总是从哈希表的头部开始进行 bucket 的分裂,也不会有不及时处理非常满的 bucket 的问题。
Spiral Storage 的思路是这样的。哈希表的负载从前向后逐渐降低;扩展大小时,需要将表头的 bucket 中的元素分配到多个新 bucket 中并添加到哈希表的末尾,并且依然保持负载从前向后逐渐下降的性质。假设每去掉表头的一个 bucket 就添加 d 个新 bucket,称 d 为哈希表的增长因子。考虑到哈希表是非线性增加大小的,应该采用一个非线性增长的哈希函数族,将 U 映射到 R。易发现指数函数满足这样的性质。
spiral storage本节讲解的比较模糊,具体可以参考Google的开源实现:
- https://github.com/sparsehash/sparsehash
使用场景
单机场景:
- 对于静态哈希表而言,如果预先知道哈希表需要存储的数据集合U,那么我们要力求实现Minimal Perfect Hashing。
- 对于动态哈希表而言,如果可以预先知道部分数据的分布,那么可以针对性的设计哈希函数,尽可能达到Perfect Hashing。
- 如果没有关于数据的额外信息,我们可以在保证负载因子较低的情况下,尽量选择线性探测法(Linear Probing)来较好的利用CPU缓存。
- 在不能保证负载因子的情况下,如果需要考虑最坏情况的话,应该考虑使用分离链表法(Separate Chaining)配合平衡树搜索策略。
- 如果希望获得比较高的装载因子,同时又不希望性能下降太严重,并且可以接受一定的长尾的话,可以考虑布谷鸟哈希策略(Cuckoo Hashing)。
- 哈希表的动态大小调整一般选择Copy All策略,一方面实现简单,另一方面对哈希函数限制最小。
分布式场景:
- 分布式场景下,更多的问题在于如何快速将请求匹配到实际存储数据的节点,该场景下基本被一致性哈希所统治。
- 对于局域网(LAN)环境下的快速查找场景,如果期望常数级别的时间复杂度,最简单的方式就是缓存所有节点的映射信息。
因为哈希表一般需要保持比较低的负载因子,所以在哈希表较大的时元素会非常稀疏,如果需要支持SCAN操作的话,需要考虑在非空bucket之间建立联系。
小结
本篇作为笔者个人对哈希数据结构的学习总结的理论篇,主要和大家探讨了一下哈希数据结构的相关理论性基础知识,由于笔者个人能力有限,所以其中很多知识点笔者个人也仍然处在探索之路上,无法使用简单直白的语言表达出来,望各位见谅!
本文讲述内容其中可能含有大量理解偏差,如有大佬发现,可以在评论区指出,或者给出个人观点!
下一篇中,我将结合Java,Go,redis等热门技术来谈谈其中使用到的哈希设计原则。