一、安装Geset 库
sudo apt-get install libgtest-dev
cd /usr/src/gtest
sudo mkdir build
cd build
sudo cmake .. //一定要以sudo的方式运行,否则没有写入权限
sudo make //这个也一样要以sudo的方式
sudo cp libgtest*.a /usr/local/lib //将生成的libgtest.a 和 libgtest_main.a 拷贝到系统的lib路径下
二、修改fmt
在所有 CmakeList文件中后面添加 fmt,需要修改的有以下几处:
/app下的:
add_executable(run_kitti_stereo run_kitti_stereo.cpp)
target_link_libraries(run_kitti_stereo myslam ${THIRD_PARTY_LIBS} fmt ) /src下的:这里还需要将SHARE改为STATIC:
add_library(myslam STATIC
frame.cpp
mappoint.cpp
map.cpp
camera.cpp
config.cpp
feature.cpp
frontend.cpp
backend.cpp
viewer.cpp
visual_odometry.cpp
dataset.cpp)
target_link_libraries(myslam
${THIRD_PARTY_LIBS} fmt )
/test下的:
SET(TEST_SOURCES test_triangulation)
FOREACH (test_src ${TEST_SOURCES})
ADD_EXECUTABLE(${test_src} ${test_src}.cpp)
TARGET_LINK_LIBRARIES(${test_src} ${THIRD_PARTY_LIBS} myslam fmt )
ADD_TEST(${test_src} ${test_src})
ENDFOREACH (test_src)
三、修改kitti_stereo.cpp
需要将 assert(vo->Init() == true这行注释,并改为vo->Init()
myslam::VisualOdometry::Ptr vo(
new myslam::VisualOdometry(FLAGS_config_file));
// assert(vo->Init() == true);
vo->Init();
vo->Run();四、下载数据集
给大家分享一下百度网盘:kitti 提取码:2p1k
(整体文件很大,约22G,可以先下载一个00序列)
五、修改/config下的default.yaml中的数据集的路径
%YAML:1.0
# data
# the tum dataset directory, change it to yours!
# dataset_dir: /media/xiang/Data/Dataset/Kitti/dataset/sequences/00
//下面是需要你根据自己的路径修改:
dataset_dir: /media/tzy/TZY-YP/VSLAM/Dataset/KITTI/data_odometry_gray/dataset/sequences/00
# camera intrinsics
camera.fx: 517.3
camera.fy: 516.5
camera.cx: 325.1
camera.cy: 249.7
num_features: 150
num_features_init: 50
num_features_tracking: 50六、编译运行
cd ch13
mkdir build
cd build
cmake ..
make测试:
cd bin
./test_triangulation
运行:
注意不要在/bin 路径下执行,需要在/ch13下运行
回到上一级目录:
cd ..
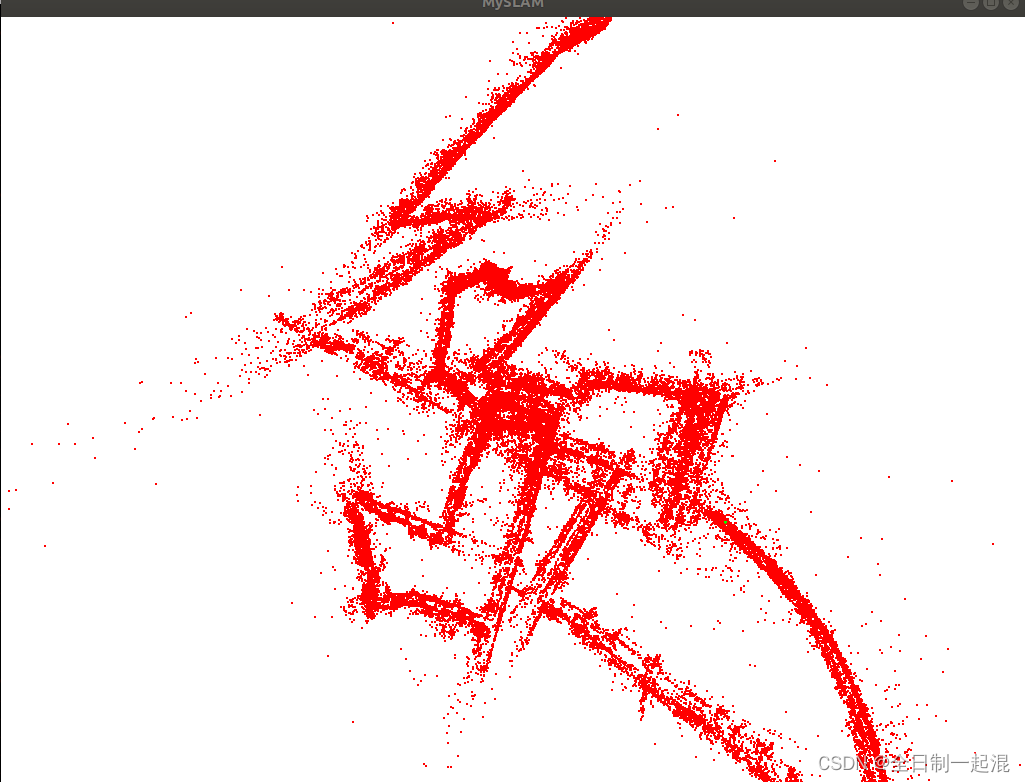
./bin/run_kitti_stereo运行效果:
七、如果需要显示全部地图轨迹
修改viewer.cpp中UpdateMap()函数:
void Viewer::UpdateMap() {
std::unique_lock<std::mutex> lck(viewer_data_mutex_);
assert(map_ != nullptr);
active_keyframes_ = map_->GetActiveKeyFrames();
//active_landmarks_ = map_->GetActiveMapPoints();
active_landmarks_ = map_->GetAllMapPoints(); // 改为all mappoints,显示整体地图
map_updated_ = true;
}重新编译运行,效果如图,可以看出轨迹和地图错位严重,并且01序列直接跟踪失败