目录
1 事件标志组概念及其应用
1.1 事件标志组定义
1.2 FreeRTOS事件标志组介绍
1.3 FreeRTOS事件标志组工作原理
2 事件标志组应用
2.1 功能需求
2.2 API
2.3 功能实现
3 事件标志组原理
3.1 事件标志组控制块
3.2 事件标志组获取标志位
3.3 等待事件标志触发
3.4 事件标志组设置标志位
3.5 事件标志组任务同步
1 事件标志组概念及其应用
1.1 事件标志组定义

门钥匙代表或的问题,每个都可以开启
公交车代表与的问题,到齐了才可以走

FreeRTOS事件标志组一共8个bit。
如Task 1或Tast 2去触发第1位,第1位或第三位能触发任务Task3
如Task 6、7、8同时置位触发Task 4
1.2 FreeRTOS事件标志组介绍
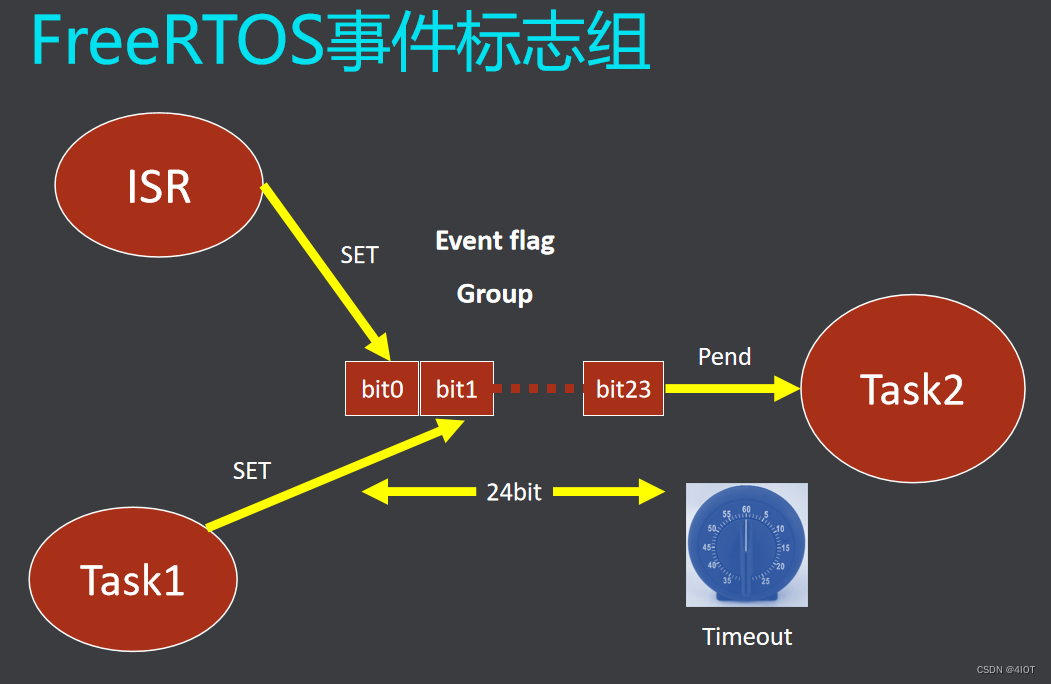
任务可以和事件标志组进行关联,如bit23,任务阻塞等待消息,和消息队列一样有个超时机制
当任意任务或者中断触发置位的时候,任务会从阻塞变为就绪态。
1.3 FreeRTOS事件标志组工作原理

创建事件控制块,关联事件,等待事件触发
2 事件标志组应用
2.1 功能需求
- 1、使用事件标志组检测多个按键输入(K3、K4、K5、K6)
- 2、当检测到任何一个按键按下,串口打印输出按键信息
- 3、当4路按键都已经按下,触发蜂鸣器报警
2.2 API
CubeMX中未提供,需要自己创建

EventBits_t 返回值返回的是所有24位的值
守护任务:处理操作系统不想在中断中处理的任务,是一种特殊类型的任务,它在系统中扮演着重要的角色。它被用于监控和处理FreeRTOS内部的错误和异常情况,以确保系统的稳定性。守护任务可以使用软件定时器来执行一些周期性的任务。通过创建一个周期性的软件定时器,守护任务可以在固定的时间间隔内执行特定的操作。例如,守护任务可以使用软件定时器来定期检查任务堆栈的使用情况、检测任务优先级错误或处理未处理的中断等。软件定时器提供了一种简便的方式来触发守护任务的执行,以确保系统中的重要任务得到及时处理。

中断中不允许上下文切换,都是由守护任务来执行的。
 使用WaitBits,会让任务进入阻塞态
使用WaitBits,会让任务进入阻塞态


参数解释:
xEventGroup:事件组句柄,表示要操作的事件组。uxBitsToWaitFor:等待的事件位,即需要等待其中的哪些事件发生。可以使用位掩码形式指定多个事件位。若指定为0,则表示不等待任何事件,直接返回当前事件组的位状态。uxBitsToSet:设置的事件位,即在等待期间发生事件后,需要设置哪些事件位。同样,可以使用位掩码指定多个事件位。xTicksToWait:等待的超时时间,以FreeRTOS的Tick单位表示。可以设置为portMAX_DELAY表示无限等待,或者具体的等待时间。
返回值:
- 返回已经发生的事件位,即满足等待条件的事件。如果等待发生事件时超时,则返回0。
使用xEvetnGroupSync函数的具体步骤如下:
- 创建或获取一个事件组句柄。
- 使用xEvetnGroupSync函数等待指定的事件位。可以设置需要等待的事件位、需要设置的事件位和等待超时时间。
- 根据返回值判断等待是否成功,根据已发生的事件位执行相应的操作。
注意,xEvetnGroupSync函数是一个阻塞函数,即在等待期间会阻塞当前任务的执行。如果有其他任务在等待相同的事件组,则它们可能会被唤醒以执行后续操作。因此,在使用xEvetnGroupSync函数时需要谨慎设计,以避免出现死锁或优先级反转等问题。
2.3 功能实现
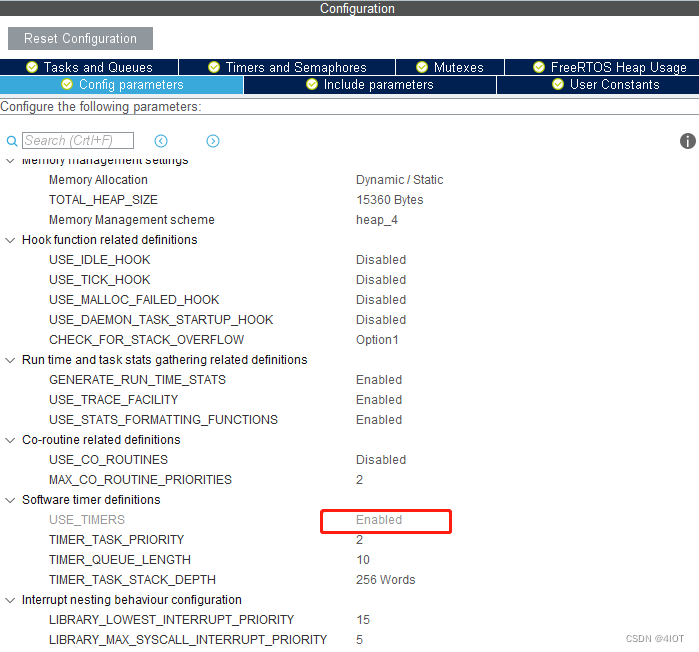
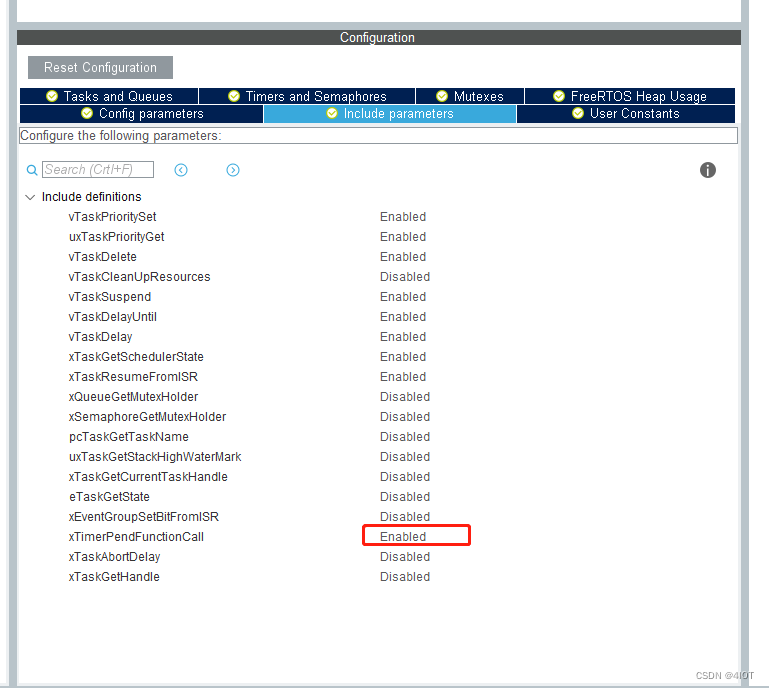
STM32CubeMX功能配置
GPIO略
根据接口说明 ,事件标志组中断中需要开启守护任务

按键中断及事件标志组创建
//freertos.c
//...略
#include "event_groups.h"
EventGroupHandle_t KeyEventGroup; //全局变量句柄
void MX_FREERTOS_Init(void) {
//创建
KeyEventGroup = xEventGroupCreate();
if(KeyEventGroup == NULL){
printf("KeyEventGroup Create Error\r\n");
}
//...略
}
按键检测任务和蜂鸣器报警任务


//gpio.c
#include "event_groups.h"
//...略
/*
#define KEY3_EVENT_BIT (1<<0)
#define KEY4_EVENT_BIT (1<<1)
#define KEY5_EVENT_BIT (1<<2)
#define KEY6_EVENT_BIT (1<<3)
typedef enum
{
KEY_DOWN,
KEY_UP,
KEY_RESET
}teKeyStatus;
*/
teKeyStatus KeyStatus;
extern EventGroupHandle_t KeyEventGroup;
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin){
if(Key3_Pin == GPIO_Pin)
{
if(HAL_GPIO_ReadPin(Key3_GPIO_Port,Key3_Pin) == GPIO_PIN_RESET)
{
HAL_Delay(10);
if(HAL_GPIO_ReadPin(Key3_GPIO_Port,Key3_Pin) == GPIO_PIN_RESET)
{
//设置事件
xEventGroupSetBitsFromISR(KeyEventGroup,KEY3_EVENT_BIT,NULL);
}
}
}
if(Key4_Pin == GPIO_Pin)
{
if(HAL_GPIO_ReadPin(Key4_GPIO_Port,Key4_Pin) == GPIO_PIN_RESET)
{
HAL_Delay(10);
if(HAL_GPIO_ReadPin(Key4_GPIO_Port,Key4_Pin) == GPIO_PIN_RESET)
{
//设置事件
xEventGroupSetBitsFromISR(KeyEventGroup,KEY4_EVENT_BIT,NULL);
}
}
}
if(Key5_Pin == GPIO_Pin)
{
if(HAL_GPIO_ReadPin(Key5_GPIO_Port,Key5_Pin) == GPIO_PIN_RESET)
{
HAL_Delay(10);
if(HAL_GPIO_ReadPin(Key5_GPIO_Port,Key5_Pin) == GPIO_PIN_RESET)
{
//设置事件
xEventGroupSetBitsFromISR(KeyEventGroup,KEY5_EVENT_BIT,NULL);
}
}
}
if(Key6_Pin == GPIO_Pin)
{
if(HAL_GPIO_ReadPin(Key6_GPIO_Port,Key6_Pin) == GPIO_PIN_RESET)
{
HAL_Delay(10);
if(HAL_GPIO_ReadPin(Key6_GPIO_Port,Key6_Pin) == GPIO_PIN_RESET)
{
//设置事件
xEventGroupSetBitsFromISR(KeyEventGroup,KEY6_EVENT_BIT,NULL);
}
}
}
}
//freertos.c
void Delay_Task(void const * argument)
{
/* USER CODE BEGIN Delay_Task */
EventBits_t KeyEventBits;
/* Infinite loop */
for(;;)
{
KeyEventBits = xEventGroupWaitBits(KeyEventGroup,
KEY3_EVENT_BIT|KEY4_EVENT_BIT|KEY5_EVENT_BIT|KEY6_EVENT_BIT,
pdFALSE,
pdFALSE,
portMAX_DELAY);
printf("Key is Down Key Event Bit is %x\r\n",KeyEventBits);
osDelay(10);
}
}
void High_Task(void const * argument)
{
EventBits_t KeyEventBits;
for(;;)
{
KeyEventBits = xEventGroupWaitBits(KeyEventGroup,
KEY3_EVENT_BIT|KEY4_EVENT_BIT|KEY5_EVENT_BIT|KEY6_EVENT_BIT,
pdTRUE,
pdTRUE,
portMAX_DELAY);
if(KeyEventBits == (KEY3_EVENT_BIT|KEY4_EVENT_BIT|KEY5_EVENT_BIT|KEY6_EVENT_BIT))
{
printf("Buzzer is Toggle\r\n");
HAL_GPIO_TogglePin(Buzzer_GPIO_Port,Buzzer_Pin);
}
osDelay(10);
}
}3 事件标志组原理
3.1 事件标志组控制块

#define eventCLEAR_EVENTS_ON_EXIT_BIT 0x01000000UL //表示退出是否清楚已经触发的标志位 25bit表示
#define eventUNBLOCKED_DUE_TO_BIT_SET 0x02000000UL //解除阻塞是否,已经设置标志位 26位
#define eventWAIT_FOR_ALL_BITS 0x04000000UL //是与逻辑还是或逻辑
#define eventEVENT_BITS_CONTROL_BYTES 0xff000000UL //用于分解出,事件标志组位使用
typedef struct xEventGroupDefinition
{
//事件标志组
EventBits_t uxEventBits;
//任务等待的列表
List_t xTasksWaitingForBits; /*< List of tasks waiting for a bit to be set. */
} EventGroup_t;
3.2 事件标志组获取标志位

全局变量一定要保护,所以要进入临界段
#define xEventGroupGetBits( xEventGroup ) xEventGroupClearBits( xEventGroup, 0 )
/*
参数:
1、控制块/句柄
2、要清除位
返回值:
事件标志位
*/ 1<<0
EventBits_t xEventGroupClearBits( EventGroupHandle_t xEventGroup, const EventBits_t uxBitsToClear )
{
EventGroup_t *pxEventBits = ( EventGroup_t * ) xEventGroup;
EventBits_t uxReturn;
/*
1、进入临界段
2、获取当前事件标志位
3、清除要设置的事件标志位
4、退出临界段
5、返回事件标志组值
*/
taskENTER_CRITICAL();
{
/* The value returned is the event group value prior to the bits being
cleared. */
uxReturn = pxEventBits->uxEventBits;
/* Clear the bits. */
pxEventBits->uxEventBits &= ~uxBitsToClear;
}
taskEXIT_CRITICAL();
return uxReturn;
}
/*
参数:
1、事件控制块
返回值:
事件标志位
*/
EventBits_t xEventGroupGetBitsFromISR( EventGroupHandle_t xEventGroup )
{
UBaseType_t uxSavedInterruptStatus;
EventGroup_t *pxEventBits = ( EventGroup_t * ) xEventGroup;
EventBits_t uxReturn;
//禁止中断 带返回值
uxSavedInterruptStatus = portSET_INTERRUPT_MASK_FROM_ISR();
{
//获取事件标志位
uxReturn = pxEventBits->uxEventBits;
}
//恢复中断,在进入禁止之前的状态
portCLEAR_INTERRUPT_MASK_FROM_ISR( uxSavedInterruptStatus );
return uxReturn;
}3.3 等待事件标志触发

复位列表项:表示事件信息
/*
参数:
1、事件控制块
2、要等待出发的标志位
3、退出是否要清除
4、与逻辑还是或逻辑
5、阻塞等待时间
返回值:
当前事件标志位
*/
EventBits_t xEventGroupWaitBits( EventGroupHandle_t xEventGroup,
const EventBits_t uxBitsToWaitFor,
const BaseType_t xClearOnExit,
const BaseType_t xWaitForAllBits,
TickType_t xTicksToWait )
{
EventGroup_t *pxEventBits = ( EventGroup_t * ) xEventGroup;
EventBits_t uxReturn, uxControlBits = 0;
BaseType_t xWaitConditionMet, xAlreadyYielded;
BaseType_t xTimeoutOccurred = pdFALSE;
//挂起调度器
vTaskSuspendAll();
{
//获取当前的事件标志位
const EventBits_t uxCurrentEventBits = pxEventBits->uxEventBits;
/* 检查是否触发
参数:
1、当前的事件标志位
2、要等待触发的事件标志位
3、触发逻辑???
返回值:
pdFALSE pdTRUE
*/
xWaitConditionMet = prvTestWaitCondition( uxCurrentEventBits, uxBitsToWaitFor, xWaitForAllBits );
if( xWaitConditionMet != pdFALSE )
{
/* 已经触发 */
uxReturn = uxCurrentEventBits;
xTicksToWait = ( TickType_t ) 0;
/* 清楚已经触发的标志 */
if( xClearOnExit != pdFALSE )
{
pxEventBits->uxEventBits &= ~uxBitsToWaitFor;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else if( xTicksToWait == ( TickType_t ) 0 )
{
/* 不需要超时,直接返回标志位. */
uxReturn = uxCurrentEventBits;
}
else
{
/* 事件没有触发,并且需要超时*/
if( xClearOnExit != pdFALSE )
{
//uxControlBits = 0x01000000UL;
uxControlBits |= eventCLEAR_EVENTS_ON_EXIT_BIT;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
if( xWaitForAllBits != pdFALSE )
{
//uxControlBits = 0x05000000UL;
uxControlBits |= eventWAIT_FOR_ALL_BITS;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
/* 把任务添加到事件列表中
参数:
1、列表的地址
2、传入列表项值
3、任务阻塞时间
*/
vTaskPlaceOnUnorderedEventList( &( pxEventBits->xTasksWaitingForBits ), ( uxBitsToWaitFor | uxControlBits ), xTicksToWait );
uxReturn = 0;
traceEVENT_GROUP_WAIT_BITS_BLOCK( xEventGroup, uxBitsToWaitFor );
}
}
//恢复调度器
xAlreadyYielded = xTaskResumeAll();
//再次判断是否需要超时
if( xTicksToWait != ( TickType_t ) 0 )
{
if( xAlreadyYielded == pdFALSE )
{
//进行上下文切换 ->pendSV
portYIELD_WITHIN_API();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
/*
任务已经恢复
1、复位列表项中的值 复位为任务有优先级
*/
uxReturn = uxTaskResetEventItemValue();
//是不是通过事件置位解除的任务
if( ( uxReturn & eventUNBLOCKED_DUE_TO_BIT_SET ) == ( EventBits_t ) 0 )
{
//进入临界段
taskENTER_CRITICAL();
{
/* 获取当前事件位. */
uxReturn = pxEventBits->uxEventBits;
/* 再此判断是否已经置位 */
if( prvTestWaitCondition( uxReturn, uxBitsToWaitFor, xWaitForAllBits ) != pdFALSE )
{
//如果需要清除,清除触发后的标志位
if( xClearOnExit != pdFALSE )
{
pxEventBits->uxEventBits &= ~uxBitsToWaitFor;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
taskEXIT_CRITICAL();
xTimeoutOccurred = pdFALSE;
}
else
{
/* The task unblocked because the bits were set. */
}
/* 返回当前事件标志位. */
uxReturn &= ~eventEVENT_BITS_CONTROL_BYTES;
}
traceEVENT_GROUP_WAIT_BITS_END( xEventGroup, uxBitsToWaitFor, xTimeoutOccurred );
return uxReturn;
}3.4 事件标志组设置标志位

/*
参数:
1、事件控制块
2、要设置的事件位
返回值:
1、当前事件标志位
*/
EventBits_t xEventGroupSetBits( EventGroupHandle_t xEventGroup, const EventBits_t uxBitsToSet )
{
ListItem_t *pxListItem, *pxNext;
ListItem_t const *pxListEnd;
List_t *pxList;
EventBits_t uxBitsToClear = 0, uxBitsWaitedFor, uxControlBits;
EventGroup_t *pxEventBits = ( EventGroup_t * ) xEventGroup;
BaseType_t xMatchFound = pdFALSE;
//获取事件列表头
pxList = &( pxEventBits->xTasksWaitingForBits );
//获取列表尾节点
pxListEnd = listGET_END_MARKER( pxList ); /*lint !e826 !e740 The mini list structure is used as the list end to save RAM. This is checked and valid. */
//挂起调度器
vTaskSuspendAll();
{
//获取头节点
pxListItem = listGET_HEAD_ENTRY( pxList );
/* 设置事件标志位 */
pxEventBits->uxEventBits |= uxBitsToSet;
/* 循环遍历整个列表项,直到列表头节点等于尾节点(指针) */
while( pxListItem != pxListEnd )
{
//获取下个列表项
pxNext = listGET_NEXT( pxListItem );
//获取当前列表项的值
uxBitsWaitedFor = listGET_LIST_ITEM_VALUE( pxListItem );
//标记,是否找到需要处理的节点
xMatchFound = pdFALSE;
/* 拆分*/
uxControlBits = uxBitsWaitedFor & eventEVENT_BITS_CONTROL_BYTES;
uxBitsWaitedFor &= ~eventEVENT_BITS_CONTROL_BYTES;
if( ( uxControlBits & eventWAIT_FOR_ALL_BITS ) == ( EventBits_t ) 0 )
{
//或逻辑
/* 等待位已经置位 */
if( ( uxBitsWaitedFor & pxEventBits->uxEventBits ) != ( EventBits_t ) 0 )
{
//找到了已经触发的节点
xMatchFound = pdTRUE;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
//表示所有等待的位都已经触发
else if( ( uxBitsWaitedFor & pxEventBits->uxEventBits ) == uxBitsWaitedFor )
{
/*找到触发的节点 */
xMatchFound = pdTRUE;
}
else
{
/* Need all bits to be set, but not all the bits were set. */
}
if( xMatchFound != pdFALSE )
{
/* 是否需要清除 */
if( ( uxControlBits & eventCLEAR_EVENTS_ON_EXIT_BIT ) != ( EventBits_t ) 0 )
{
//做个标记
uxBitsToClear |= uxBitsWaitedFor;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
/* 把任务从事件列表中移除
参数:
1、列表项
2、事件标志位+解锁处理标志位 内部写入了列表项的value里面
*/
( void ) xTaskRemoveFromUnorderedEventList( pxListItem, pxEventBits->uxEventBits | eventUNBLOCKED_DUE_TO_BIT_SET );
}
/* 当前列表项指向下个,继续遍历*/
pxListItem = pxNext;
}
/* 清除设置后的标志位 */
pxEventBits->uxEventBits &= ~uxBitsToClear;
}
//开启调度器
( void ) xTaskResumeAll();
return pxEventBits->uxEventBits;
}
/*
参数:
1、事件控制块
2、要设置的标志位
3、NULL
*/
BaseType_t xEventGroupSetBitsFromISR( EventGroupHandle_t xEventGroup, const EventBits_t uxBitsToSet, BaseType_t *pxHigherPriorityTaskWoken )
{
BaseType_t xReturn;
//调用软件定时器函数,,用于发送消息到软件定时器任务,进行处理
xReturn = xTimerPendFunctionCallFromISR( vEventGroupSetBitsCallback, ( void * ) xEventGroup, ( uint32_t ) uxBitsToSet, pxHigherPriorityTaskWoken );
return xReturn;
}
/*
设置事件标志位的回调函数,内部其实就是调用xEventGroupSetBits
*/
void vEventGroupSetBitsCallback( void *pvEventGroup, const uint32_t ulBitsToSet )
{
( void ) xEventGroupSetBits( pvEventGroup, ( EventBits_t ) ulBitsToSet );
}
BaseType_t xTimerPendFunctionCallFromISR( PendedFunction_t xFunctionToPend, void *pvParameter1, uint32_t ulParameter2, BaseType_t *pxHigherPriorityTaskWoken )
{
DaemonTaskMessage_t xMessage;
BaseType_t xReturn;
/* 封装消息 */
xMessage.xMessageID = tmrCOMMAND_EXECUTE_CALLBACK_FROM_ISR;
xMessage.u.xCallbackParameters.pxCallbackFunction = xFunctionToPend;
xMessage.u.xCallbackParameters.pvParameter1 = pvParameter1;
xMessage.u.xCallbackParameters.ulParameter2 = ulParameter2;
//通过消息队列和软件定时器任务进行通信
xReturn = xQueueSendFromISR( xTimerQueue, &xMessage, pxHigherPriorityTaskWoken );
/*
分析:
软件定时器任务要等待消息队列,之后解析处理,最终调用xEventGroupSetBits
*/
return xReturn;
}3.5 事件标志组任务同步
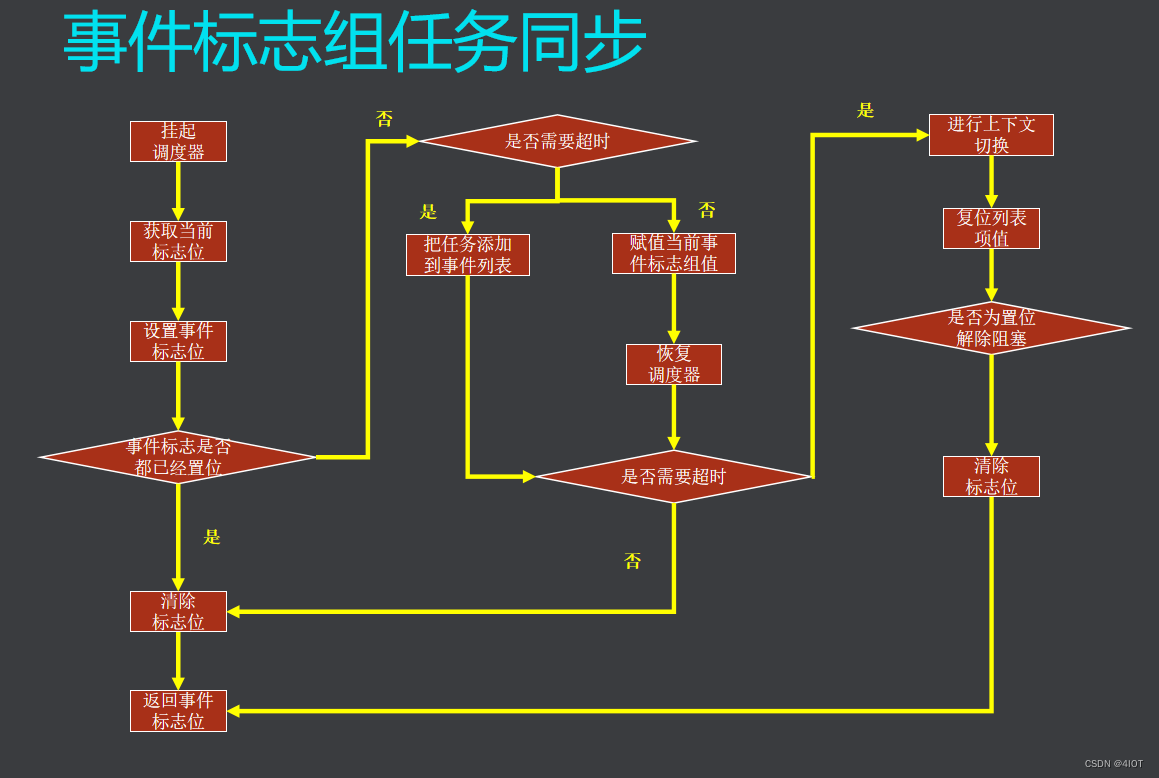
待完成