1 一言以蔽之
- (1) DPG是属于确定性策略梯度算法
- (2)用于解决连续动作空间问题
2 优点和缺点
- 2.1 优点
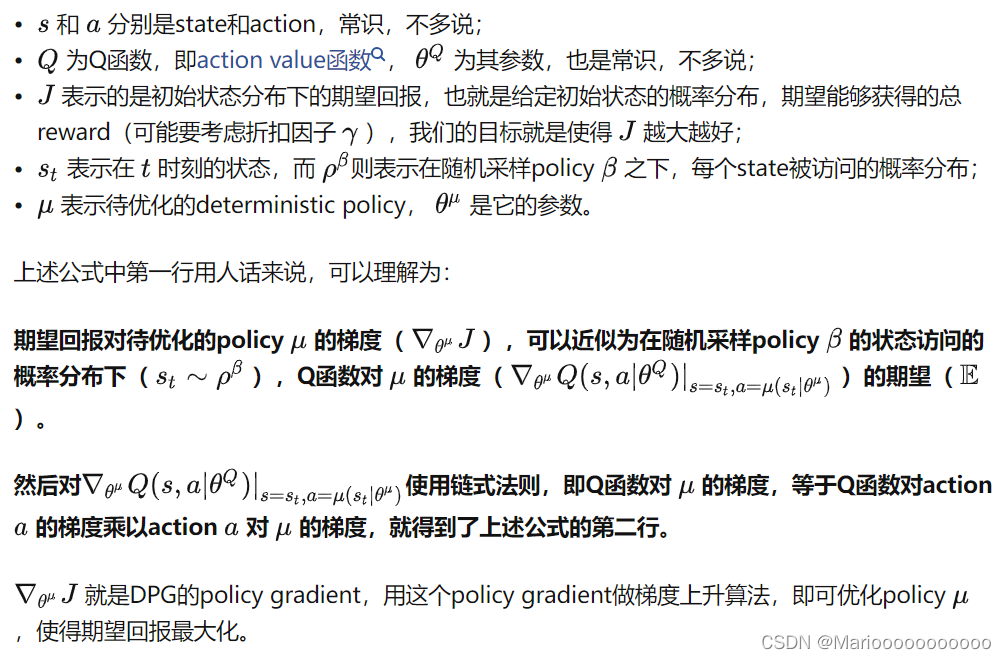
- (1)从理论上可以证明,deterministic policy的梯度就是Q函数梯度的期望,这使得deterministic方法在计算上比stochastic方法更高效;
- 2.2 缺点
- (1)对于每个state,下一步的action是确定的。这就导致只能做exploitation而不能做exploration。这可能也是为什么policy gradient一开始就采用stochastic算法的原因。
3 核心理论
- (1)策略梯度是Q对动作参数
θ
μ
\theta^{\mu}
θμ进行求导。

参考链接