一、GPIO简介
i.MX6ULL 芯片的 GPIO 被分成 5 组,并且每组 GPIO 的数量不尽相同,例如 GPIO1 拥有 32 个引脚, GPIO2 拥有 22 个引脚, 其他 GPIO 分组的数量以及每个 GPIO 的功能请参考 《i.MX 6UltraLite Applications Processor Reference Manual》 第26章General Purpose Input/Output (GPIO)(P1133)。
通过 GPIO 硬件结构框图,就可以从整体上深入了解 GPIO 外设及它的各种应用模式。
1.1 IO命名
打开 i.MX6ULL 参考手册的第 32 章“Chapter 32: IOMUX Controller(IOMUXC)”
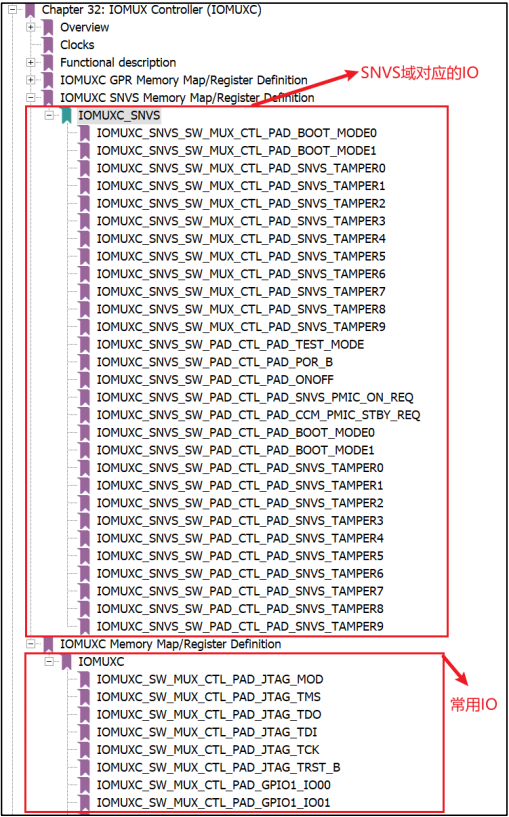
i.MX6ULL 的 IO 分为两类:SNVS 域的和通用的,这两类 IO 本质上都是一样的。
“IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO00”的就是 GPIO 命名,命名形式就是“IOMUXC_SW_MUC_CTL_PAD_XX_XX”,后面的“XX_XX”就是 GPIO 命名,比如:GPIO1_IO01、UART1_TX_DATA、JTAG_MOD 等等。他是 根据某个 IO 所拥有的功能来命名的。比如我们一看到 GPIO1_IO01 就知道这个肯定能做 GPIO,看到 UART1_TX_DATA 肯定就知道这个 IO 肯定能做为 UART1 的发送引脚。
IO 复用功能。 i.MX6ULL 除了 GPIO1_IO00~GPIO1_IO09 引脚外,其它 IO 也是可以复用为 GPIO 功能。同样的,GPIO1_IO00~GPIO_IO09 也是可以复用为其它外设引脚。
1.2 IO复用
IOMUX 译为 IO 复用选择器。i.MX6ULL 的芯片每个 GPIO 都通过 IOMUX 支持多种功能, 例如一个 IO 可用于网络外设 ENET 的数据接收引脚,也可以被配置成 PWM 外设的输出引脚, 这样的设计大大增加了芯片的适用性,这样可选的功能就是由 IOMUX 实现的。IOMUX 相当于增加了多根内部信号线与 IO 引脚相连,
最多有 8 根,也就是说一个 IO 最多可支持 8 种可选的功能。
以“IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO00”这个 IO 为例,打开参考手册的 1568 页。
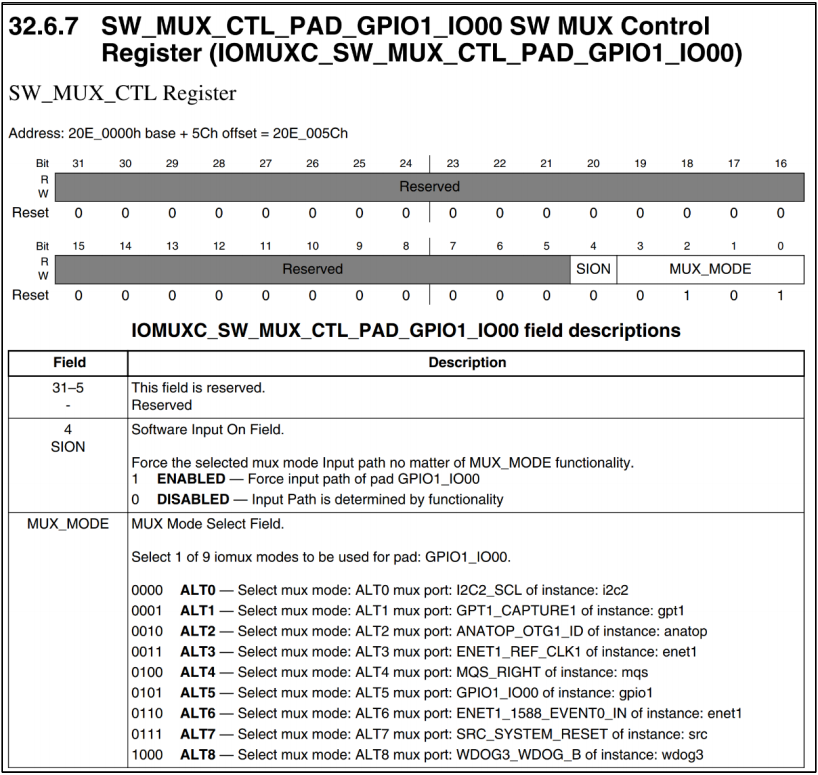
可以看到有个名为:IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO00 的寄存器,寄存器地址为 0X020E005C,这个寄存器是 32 位的,但是只用到了最低 5 位,其中 bit0~bit3(MUX_MODE) 就是设置 GPIO1_IO00 的复用功能的。GPIO1_IO00 一共可以复用为 9 种功能 IO,分别对应 ALT0~ALT8,其中 ALT5 就是作为 GPIO1_IO00。GPIO1_IO00 还可以作为 I2C2_SCL、GPT1_CAPTURE1、ANATOP_OTG1_ID 等。
1.3 IO配置
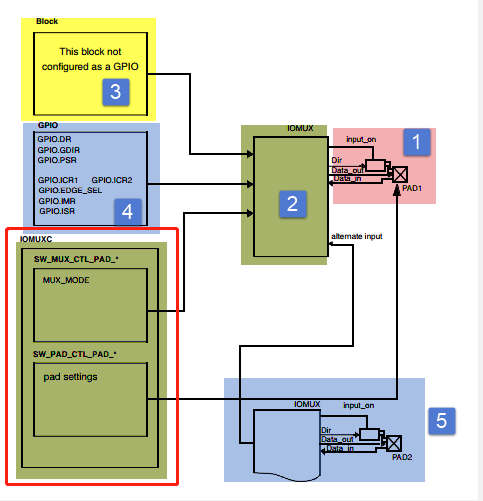
IOMUX 由其左侧的 IOMUXC 控制(C表示Controler),IOMUXC 提供寄存器给用户进行配置, 它又分成 MUX Mode(IO模式控制) 以及 Pad Settings(Pad配置) 两个部分:
在 IOMUXC 外设中关于 MUX Mode 和 Pad Settings 寄存器命名格式如下:
| IOMUXC控制类型 | 寄存器名称 |
|---|---|
| MUX Mode | IOMUXC_SW_MUX_CTL_PAD_XXXX |
| Pad Settings | IOMUXC_SW_PAD_CTL_PAD_XXXX |
每个引脚都包含这两个寄存器,表中的XXXX表示引脚的名字
1.3.1 MUX Mode配置
MUX Mode 就是用来
配置引脚的复用功能,即选择引脚具体是用于网络外设 ENET 的数据接收, 还是用于 PWM 外设的输出引脚,当然,也可以配置成普通的 IO 口,仅用于控制输出高低电平。
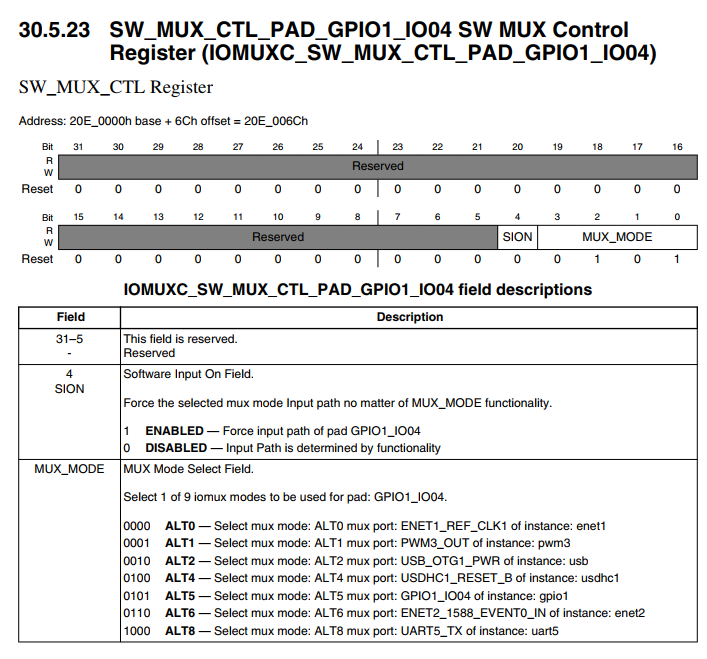
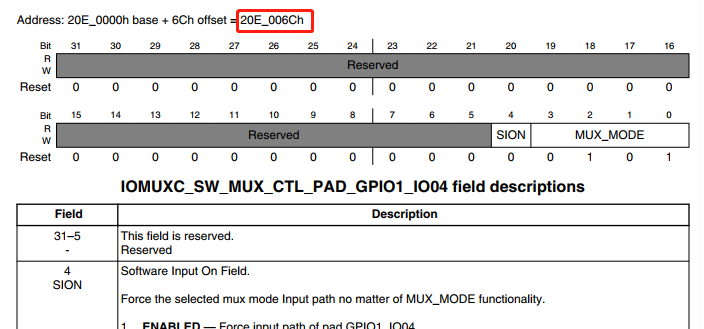
以 GPIO1_IO04 引脚为例对 MUX 寄存器进行说明,该引脚相应的 MUX 寄存器在参考手册中的描述如下:
该寄存器主要有两个配置域,分别是 SION 和 MUX_MODE。
- SION: 用于设置引脚在输出模式下同时开启输入通道。
- MUX_MODE: 使用 4 个寄存器位表示可选的 ALT0~ALT7 这 8 个模式。
- 如 ALT2 模式就是用于 USB 外设的 USB_OTG1_PWR 信号;
- 若配置为 ALT5 则引脚会用作普通的 GPIO 功能, 用于输出高、低电平。
1.3.2 Pad Settings配置
Pad Settings 用于
配置引脚的属性,例如驱动能力,是否使用上下拉电阻, 是否使用保持器,是否使用开漏模式以及使用施密特模式还是CMOS模式等。
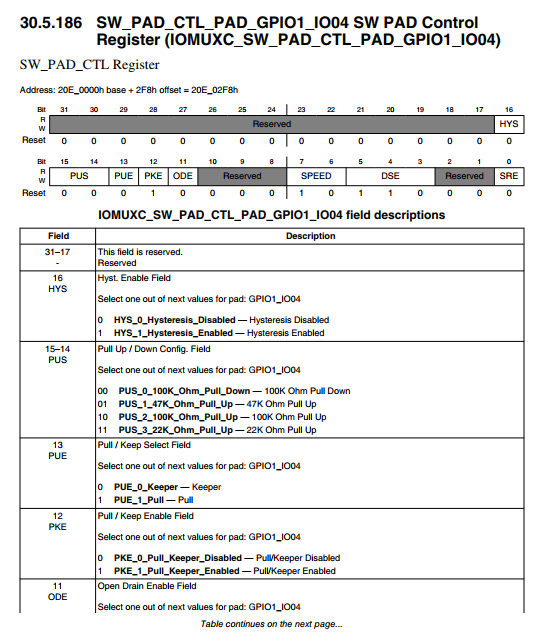
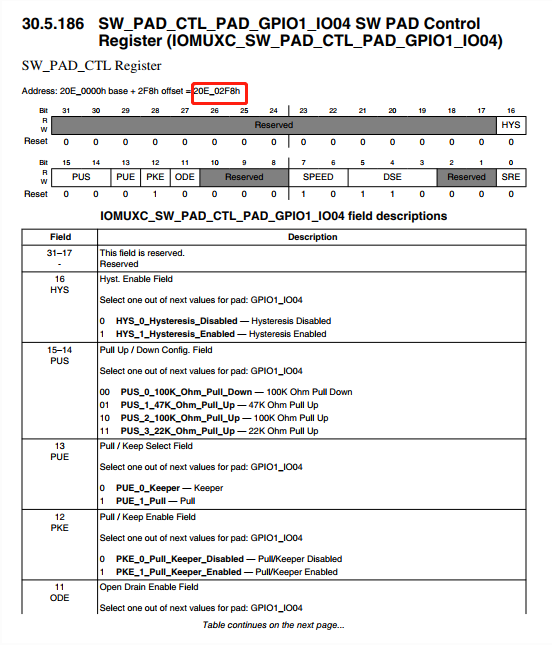
以 GPIO1_IO04 引脚中 PAD 寄存器在参考手册中的描述如下:
相对来说 PAD 寄存器的配置项就更丰富了,而且图中仅是该寄存器的部分说明,如 HYS 设置使用施密特模式的滞后功能,PUS 配置上下拉电阻的阻值, 其它的还包含PUE、PKE、ODE、SPEED、DSE 及 SRE 的配置。
1.3.3 PAD(可跳过不看)
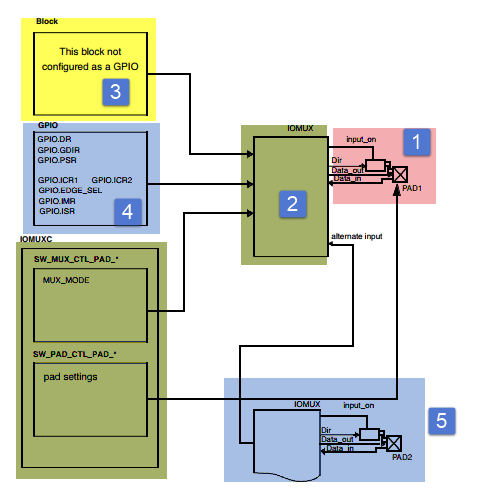
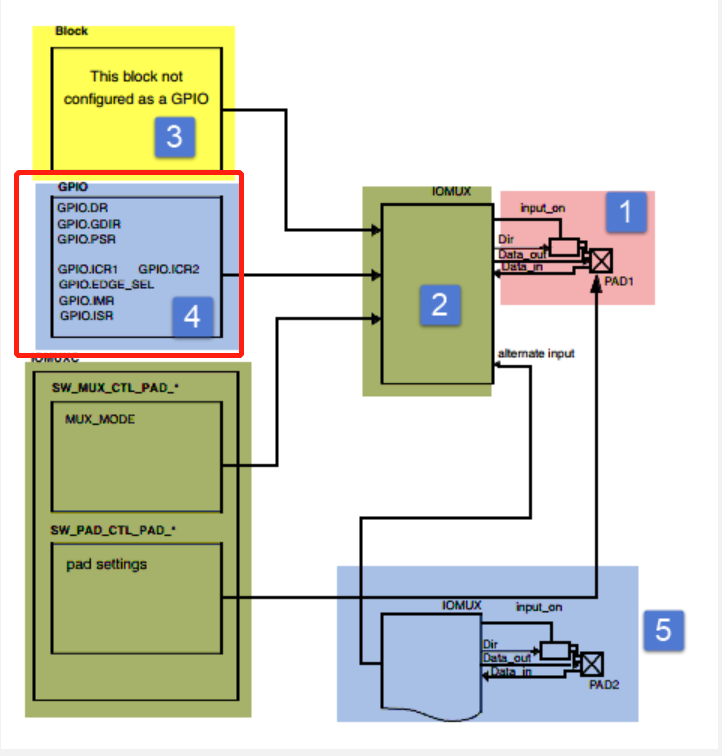
PAD 代表了一个 i.MX6ULL 的 GPIO 引脚。在它的左侧是一系列信号通道及控制线,如 input_on 控制输入开关,Dir 控制引脚的输入输出方向,Data_out 控制引脚输出高低电平,Data_in 作为信号输入,这些信号都经过一个 IOMUX 的器件连接到左侧的寄存器。
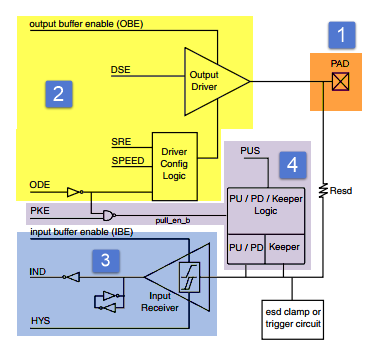
①PAD引脚
代表一个i.MX6ULL的引脚。
②输出缓冲区
当输出缓冲区使能时,引脚被配置为输出模式。在输出缓冲区中,又包含了如下的属性配置:
-
DSE驱动能力
当IO用作输出的时候用来设置IO的驱动能力。DSE可以调整芯片内部与引脚串联电阻R0的大小,从而改变引脚的驱动能力。例如,R0的初始值为260欧姆,在3.3V电压下其电流驱动能力为12.69mA,通过DSE可以把R0的值配置为原值的1/2、1/3…1/7等。位设置 速度 000 输出驱动关闭 001 R0(3.3V 下 R0 是 260Ω,1.8V 下 R0 是 150Ω,接 DDR 的时候是 240Ω) 010 R0/2 011 R0/3 100 R0/4 101 R0/5 110 R0/6 111 R0/7 -
SRE压摆率配置
设置压摆率。压摆率是指电压转换速率,可理解为电压由波谷升到波峰的时间。增大压摆率可减少输出电压的上升时间。i.MX6ULL的引脚通过SRE支持低速和高速压摆率这两种配置。当此位为0的时候是低压摆率,当为1的时候是高压摆率。压摆率是大信号特性,下面的带宽是小信号特性。 -
SPEED带宽配置
设置IO的带宽。分别可设置为50MHz、100MHz以及200MHz。带宽的意思是能通过这个IO口最高的信号频率,通俗点讲就是方波不失真,如果超过这个频率方波就变正弦波。但是这个带宽要区别于IO的翻转速率,IO的翻转速率的信号来自于GPIO这个外设,而IO的带宽只是限制了IO口引脚的物理特性,IO口的信号可以来自于内部定时器输出的PWM信号,也可以来自于GPIO翻转输出的信号,两者相比之下,PWM信号的频率是远远高于GPIO翻转输出的信号频率。位设置 速度 00 低速 50M 01 中速 100M 10 中速 100M 11 最大速度 200M -
ODE开漏输出配置
设置引脚是否工作在开漏输出模式。在该模式时引脚可以输出高阻态和低电平,此位为0的时候禁止开路输出,当此位为1的时候就使能开路输出功能。输出高阻态时可由外部上拉电阻拉至高电平。开漏输出模式常用在一些通讯总线中,如I2C。
③输入缓冲区
当输入缓冲区使能时,引脚被配置为输入模式。在输入缓冲区中,又包含了如下的属性配置:
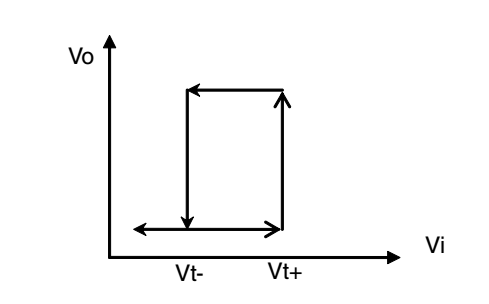
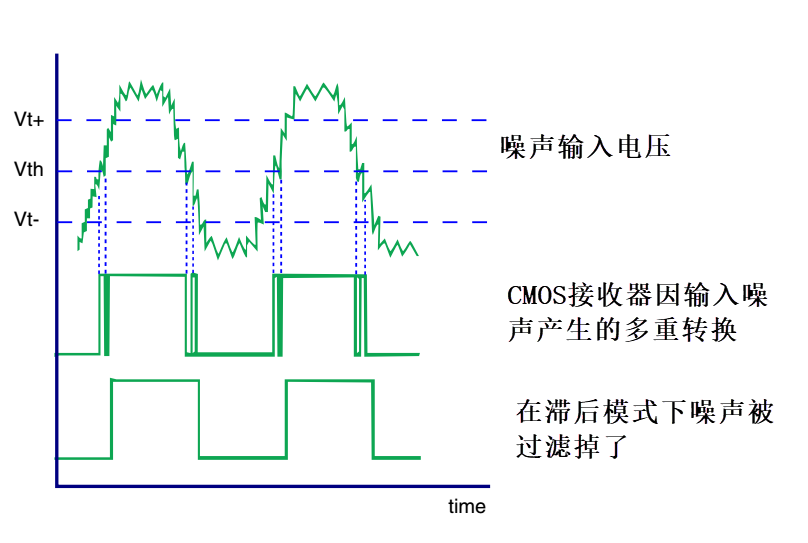
- HYS滞后使能
用来使能迟滞比较器。i.MX6ULL的输入检测可以使用普通的CMOS检测或施密特触发器模式(滞后模式)。施密特触发器具有滞后效应,对正向和负向变化的输入信有不同的阈值电压。如果需要对输入波形进行整形的话可以使能此位。此位为0的时候禁止迟滞比较器,为1的时候使能迟滞比较器。常被用于电子开关、波形变换等场合,其转换特性和对比如下,如检测按键时,使用施密特模式即可起到消抖的功能。
④Pull/Keeper上下拉、保持器
引脚的控制逻辑中还包含了上下拉、保持器的功能。芯片内部的上拉和下拉电阻可以将不确定的信号钳位在高、低电平,或小幅提高的电流输出能力,上拉提供输出电流,下拉提供输入电流。注意这些上下拉配置只是弱拉,对于类似I2C之类的总线,还是必须使用外部上拉电阻。i.MX6ULL芯片的电源模块中包含转换器,当转换器停止工作时,保持器会保持输入输出电压。
上下拉、保持器可以通过如下属性配置:
- PUS上下拉配置
设置上下拉电阻。PUS可配置项可选为100K欧下拉以及22K欧、47K欧及100K欧上拉。位设置 含义 00 100K 下拉 01 47K 上拉 10 100K 上拉 11 22K 上拉 - PUE上下拉、保持器选择
上下拉功能和保持器功能是二选一的,可以通过PUE来选择。当IO作为输入的时候,这个位用来设置 IO 使用上下拉还是状态保持器。当为0的时候使用状态保持器,当为1的时候使用上下拉。状态保持器在IO作为输入的时候才有用,顾名思义,就是当外部电路断电以后此IO口可以保持住以前的状态。 - PKE上下拉、保持器配置
用来使能或者禁止上下拉/状态保持器功能。为0时禁止上下拉/状态保持器,为1时使能上下拉和状态保持器。
注意,当引脚被配置为输出模式时,不管上下拉、保持器是什么配置,它们都会被关闭。
1.4 GPIO配置
GPIO 模块是每个 IO 都具有的外设,它具有 IO 控制最基本的功能,如输出高低电平、检测电平输入等。 它也占用 IOMUX 分配的复用信号,也就是说使用 GPIO 模块功能时同样需要使用 IOMUX 选中 GPIO 外设,对其 GPIO 的功能进行配置。
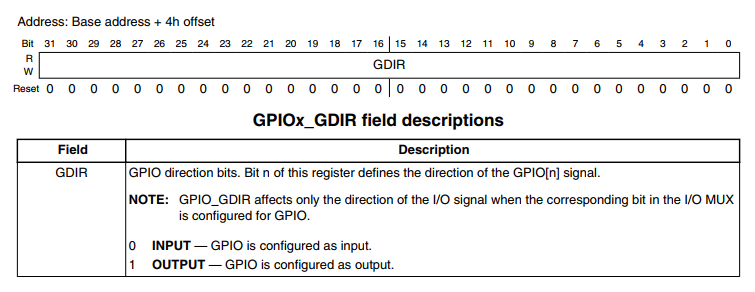
1.4.1 GDIR方向寄存器
设置某个 IO 的工作方向。控制一个 GPIO 引脚时,要先用 GDIR 方向寄存器配置该引脚用于输出电平信号还是用作输入检测。 典型的例子是使用输出模式可以控制LED灯的亮灭,输入模式时可以用来检测按键是否按下。
GDIR 寄存器的每一个数据位代表一个引脚的方向,对应的位被设置为0时该引脚为输入模式,被设置为1时该引脚为输出模式。
例如,对 GPIO1 的 GDIR 寄存器的 bit3 位被写入为 1,那么 GPIO1.3 引脚的模式即为输出。
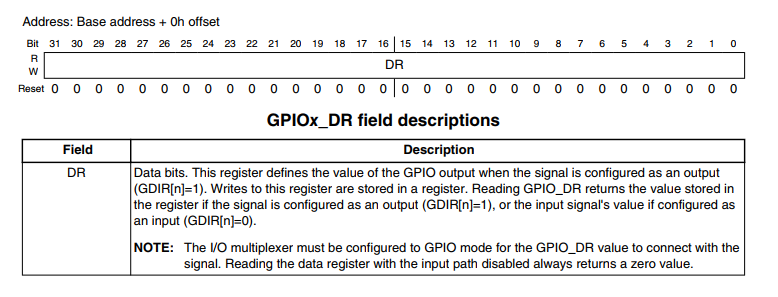
1.4.2 DR数据寄存器
DR 数据寄存器直接代表了引脚的电平状态,它也使用 1 个数据位表示 1 个引脚的电平,每位用 1 表示高电平,用 0 表示低电平。
当 GDIR 方向寄存器设置引脚为输出模式时,写入 DR 数据寄存器对应的位即可控制该引脚输出的电平状态, 如这时 GPIO1 的 DR 寄存器的 bit4 被写入为 1,则引脚为输出高电平。
当 GDIR 方向寄存器设置引脚为输入模式时,读取 DR 数据寄存器对应的位即可获取该引脚当前的输入电平状态,例如这里读取 GPIO1 的DR寄存器的 bit4,得到该位的值为 0,表示当前引脚的输入状态为低电平。
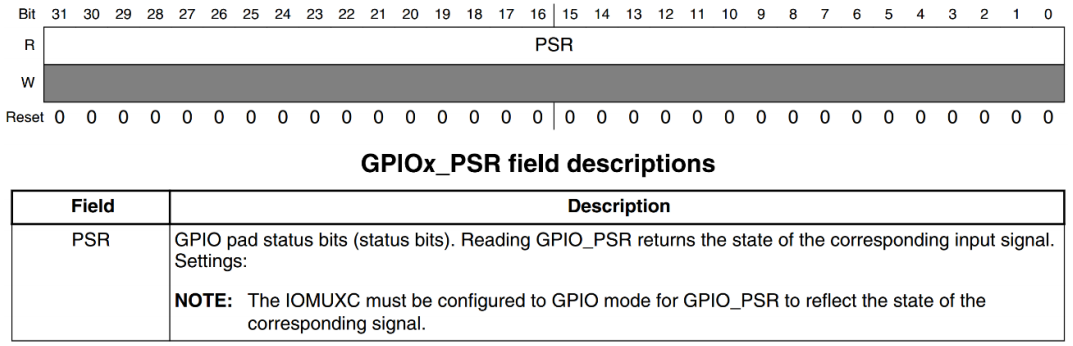
1.4.3 PSR引脚状态寄存器
读取相应的位即可获取对应的 GPIO 的状态,也就是 GPIO 的高低电平值。PSR 引脚状态寄存器相当于 DR 寄存器的简化版,它仅在 GDIR 方向寄存器设置为输入模式时有效,它的每个位表示一个引脚当前的输入电平状态。PSR 寄存器的权限是只读的,对它进行写操作是无效的。
特别地,当引脚被配置成输出模式时,若 IOMUXC 中的 MUX 寄存器使能了 SION 功能(输出通道回环至输入), 可以通过 PSR 寄存器读取回引脚的状态值。
二、GPIO输出
2.1 引脚确定
我使用的是 野火_EBF6ULL S1 Pro 开发板
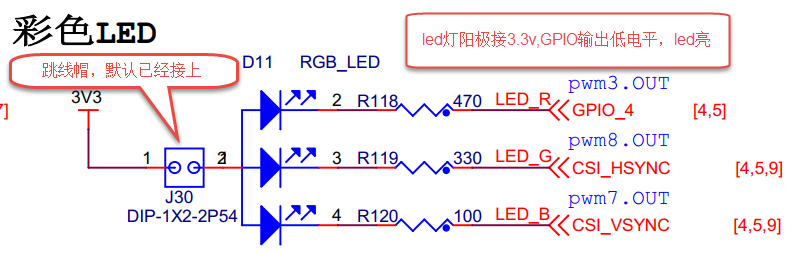
从原理图可看到 RGB 灯的三个阴极 R、G、B 连接分别连接至标号 GPIO_4、CSI_HSYNC、CSI_VSYNC, 这些标号实际上与配套核心板上 i.MX6ULL 芯片的引脚相连。由于引脚功能众多, 绘制原理图时不可避免地无法完全表示引脚信息的所有信息。而无论是具体的引脚名还是复用功能, 我们都无法直接得知这些具体是 i.MX6ULL 芯片的哪个引脚。我们需要知道这些引脚是对应的具体 GPIO,这样我们才能编写程序进行控制。
由于还不清楚标号 GPIO_4、CSI_HSYNC、CSI_VSYNC 的具体引脚名,我们首先要在核心板原理图中查看它与 i.MX6ULL 芯片的关系。打开 《野火_EBF6ULL S1 邮票孔核心板_V1.0_原理图》,在PDF阅读器的搜索框输入前面的 GPIO_4、CSI_HSYNC、CSI_VSYNC 标号。
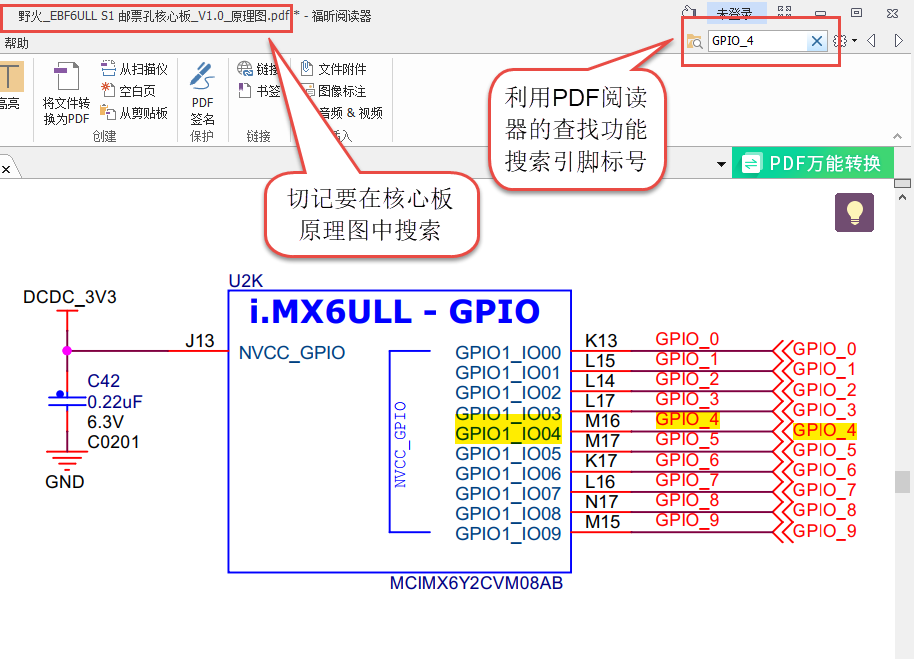
查找到了
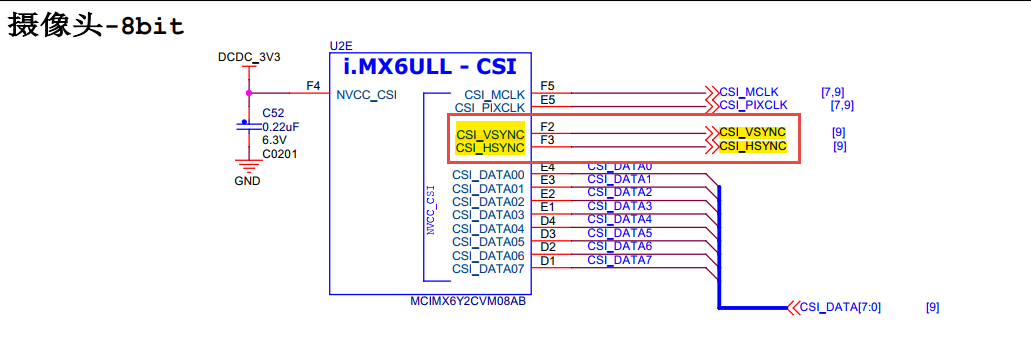
GPIO_4信号的具体引脚名为GPIO1_IO04。 但是当我们使用同样的方法查找时发现只能找到CSI_HSYNC、CSI_VSYNC, 并没有我们熟悉的 GPIOx_IOx 标注的引脚名。这两个引脚默认情况下不用作 GPIO,而是用作摄像头的某一功能引脚,但是它可以复用为 GPIO,我们怎么找到对应的 GPIO 呢?
-
方法一:
在 《i.MX 6UltraLite Applications Processor Reference Manual》的第4章 External Signals and Pin Multiplexing 搜索引脚名

-
方法二:
在官方写好的文件 fsl_iomuxc.h(路径:SDK文件夹/devices/MCIMX6Y2/drivers/fsl_iomuxc.h) 中搜索引脚名

经查阅,我们把以上连接 LED 灯的各个 i.MX6ULL 芯片引脚总结出如表:
| LED灯 | 原理图的标号 | 具体引脚名 | GPIO端口及引脚编号 |
|---|---|---|---|
| R灯 | GPIO_4 | GPIO1_IO04 | GPIO1_IO04 |
| G灯 | CSI_HSYNC | CSI_HSYNC | GPIO4_IO20 |
| B灯 | CSI_VSYNC | CSI_VSYNC | GPIO4_IO19 |
三、编程流程
1. 开启GPIO时钟
2. 设置引脚的复用功能以及引脚属性
3. 设置引脚方向以及输出电平
四、编程代码
4.1 完整代码
/*************************第一部分*************************/
.text //代码段
.align 2 //设置2字节对齐
.global _start //定义一个全局标号
/*************************第二部分*************************/
_start: //程序的开始
b reset //跳转到reset标号处
/*************************第三部分*************************/
reset:
mrc p15, 0, r0, c1, c0, 0 /* 将 CP15 协处理器中的寄存器数据读到 ARM 寄存器中 */
bic r0, r0, #(0x1 << 12) /* 清除第12位(I位)禁用 I Cache */
bic r0, r0, #(0x1 << 2) /* 清除第 2位(C位)禁用 D Cache */
bic r0, r0, #0x2 /* 清除第 1位(A位)禁止严格对齐 */
bic r0, r0, #(0x1 << 11) /* 清除第11位(Z位)分支预测 */
bic r0, r0, #0x1 /* 清除第 0位(M位)禁用 MMU */
mcr p15, 0, r0, c1, c0, 0 /* 将 ARM 寄存器的数据写入到 CP15 协处理器寄存器中 */
/*************************第四部分*************************/
/*跳转到light_led函数*/
bl light_led
/*进入死循环*/
/*************************第五部分*************************/
loop:
b loop
/*************************第六部分*************************/
/*CCM_CCGR1 时钟使能寄存器地址,默认时钟全部开启*/
#define gpio1_clock_enible_ccm_ccgr1 0x20C406C
/*IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO04
寄存器地址,用于设置GPIO1_iIO04的复用功能*/
#define gpio1_io04_mux_ctl_register 0x20E006C
/*IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO04寄存器地址,用于设置GPIO的PAD属性*/
#define gpio1_io04_pad_ctl_register 0x20E02F8
/*GPIO1_GDIR寄存器,用于设置GPIO为输入或者输出*/
#define gpio1_gdir_register 0x0209C004
/*GPIO1_DR寄存器,用于设置GPIO输出的电平状态*/
#define gpio1_dr_register 0x0209C000
/*************************第七部分*************************/
light_led:
/*开启GPIO1的时钟*/
ldr r0, =gpio1_clock_enible_ccm_ccgr1
ldr r1, =0xFFFFFFFF
str r1, [r0]
/*************************第八部分*************************/
/*将PAD引脚复用为GPIO*/
ldr r0, =gpio1_io04_mux_ctl_register
ldr r1, =0x5
str r1, [r0]
/*************************第九部分*************************/
/*设置GPIO PAD属性*/
ldr r0, =gpio1_io04_pad_ctl_register
ldr r1, =0x1F838
str r1, [r0]
/*************************第十部分*************************/
/*将GPIO_GDIR.[4] 设置为1, gpio1_io04设置为输出模式*/
ldr r0, =gpio1_gdir_register
ldr r1, =0x10
str r1, [r0]
/*************************第十一部分*************************/
/*将GPIO_DR 设置为0, gpio1全部输出为低电平*/
ldr r0, =gpio1_dr_register
ldr r1, =0x0
str r1, [r0]
/*************************第十二部分*************************/
/*跳出light_led函数,返回跳转位置*/
mov pc, lr
4.2 分析代码
在 Ubuntu 下创建 led.S 文件用于编写 LED 汇编驱动代码。
- 第一部分
.text定义代码段。
.align 2设置字节对齐。
.global _start生命全局标号_start。
/*************************第一部分*************************/
.text //代码段
.align 2 //设置2字节对齐
.global _start //定义一个全局标号
- 第二部分
_start:定义标号_start: ,它位于汇编的最前面,说以会首先被执行。
b reset使用b指令将程序跳转到reset标号处。
/*************************第二部分*************************/
_start: //程序的开始
b reset //跳转到reset标号处
- 第三部分
通过修改CP15寄存器(系统控制寄存器)关闭 I Cache 、D Cache、MMU 等等。
我们暂时用不到的功能,如果开启可能会影响我们裸机运行,为避免不必要的麻烦暂时关闭这些功能。
/*************************第三部分*************************/
reset:
mrc p15, 0, r0, c1, c0, 0 /* 将 CP15 协处理器中的寄存器数据读到 ARM 寄存器中 */
bic r0, r0, #(0x1 << 12) /* 清除第12位(I位)禁用 I Cache */
bic r0, r0, #(0x1 << 2) /* 清除第 2位(C位)禁用 D Cache */
bic r0, r0, #0x2 /* 清除第 1位(A位)禁止严格对齐 */
bic r0, r0, #(0x1 << 11) /* 清除第11位(Z位)分支预测 */
bic r0, r0, #0x1 /* 清除第 0位(M位)禁用 MMU */
mcr p15, 0, r0, c1, c0, 0 /* 将 ARM 寄存器的数据写入到 CP15 协处理器寄存器中 */
- 第四部分
bl light_led执行跳转指令,代码将跳转到函数“light_led”执行。
“bl”指令是“可返回”跳转,跳转之前的执行地址保存在lr(连接寄存器)中。
“light_led” 函数实现位于第六到十二部分。
/*************************第四部分*************************/
/*跳转到light_led函数*/
bl light_led
/*进入死循环*/
- 第五部分
light_led函数返回后就会执行标号loop处的代码,而标号loop处只有一条指令b loop, 这个指令是代码再次跳转到loop标号处,所以这是一个死循环。
/*************************第五部分*************************/
loop:
b loop
- 第六部分
定义我们用到的寄存器地址。
配置时钟使能寄存器地址设置时钟控制寄存器CCM_CCGR1的地址如下:
配置MUX Mode寄存器地址MUX Mode用于设置GPIO1_IO04的复用功能。配置成普通的IO口,仅用于控制输出高低电平。寄存器地址如下:
配置Pad Settings寄存器地址Pad Settings用于设置GPIO的PAD属性。例如驱动能力,是否使用上下拉电阻, 是否使用保持器,是否使用开漏模式以及使用施密特模式还是CMOS模式等。寄存器地址如下:
/*************************第六部分*************************/
/*CCM_CCGR1 时钟使能寄存器地址,默认时钟全部开启*/
#define gpio1_clock_enible_ccm_ccgr1 0x20C406C
/*IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO04
寄存器地址,用于设置GPIO1_IO04的复用功能*/
#define gpio1_io04_mux_ctl_register 0x20E006C
/*IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO04寄存器地址,用于设置GPIO的PAD属性*/
#define gpio1_io04_pad_ctl_register 0x20E02F8
/*GPIO1_GDIR寄存器,用于设置GPIO为输入或者输出*/
#define gpio1_gdir_register 0x0209C004
/*GPIO1_DR寄存器,用于设置GPIO输出的电平状态*/
#define gpio1_dr_register 0x0209C000
- 第七部分
开启GPIO1的时钟。
设置的时钟控制寄存器CCM_CCGR1。
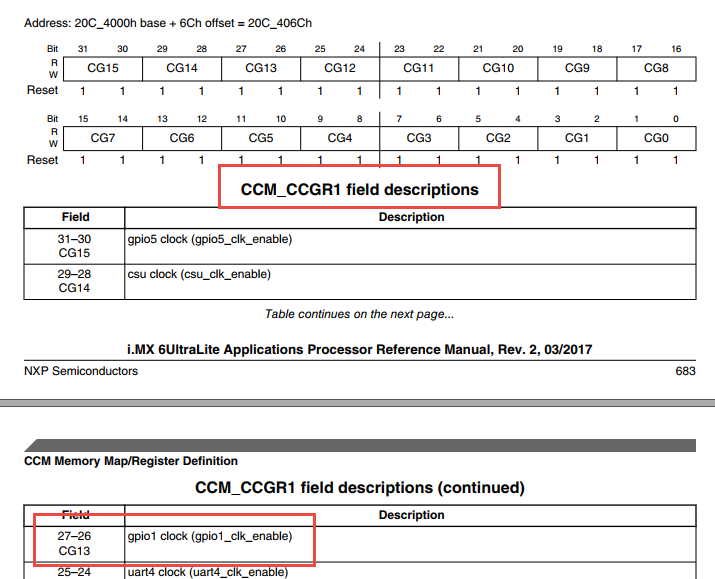
从上表中可以看出CCM_CCGR1[26:27]用于使能GPIO1的时钟,这里不仅仅设置时钟的开或者关, 还可以设置在芯片在不同工作模式下的时钟状态如下表:
| CCM_CCGR1[26:27]的值 | 时钟状态描述 |
|---|---|
| 00 | 时钟在所有模式下都是关闭的 |
| 01 | 时钟在运行模式下为开,但在等待和停止模式下为关 |
| 10 | 保留 |
| 11 | 除停止模式外,时钟一直开启 |
我们将CCM_CCGR1[26:27]设置为11(二进制)即可。仔细观察可以发现发现CCM_CCGR1寄存器默认全为1,即默认开启了时钟。 为了程序规范我们再次使用代码开启时钟。将CCM_CCGR1寄存器设置全为1。
ldr r0, =gpio1_clock_enible_ccm_ccgr1 从存储器Rn+offset(即gpio1_clock_enible_ccm_ccgr1)的位置读取数据存放到r0中。
str r1, [r0] 将r1中的数据写入到存储器中的Rn+offset(即r0的指向)位置。
/*************************第七部分*************************/
light_led:
/*开启GPIO1的时钟*/
ldr r0, =gpio1_clock_enible_ccm_ccgr1
ldr r1, =0xFFFFFFFF
str r1, [r0]
- 第八部分
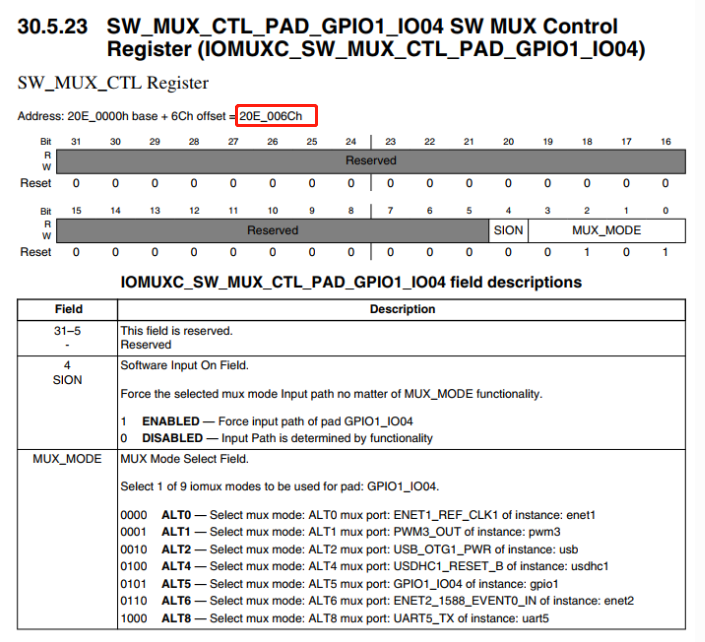
设置引脚复用功能为GPIO。
这里设置的是GPIO1_04的引脚复用寄存器,我们直接搜索IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO04可以找到如下所示的寄存器。
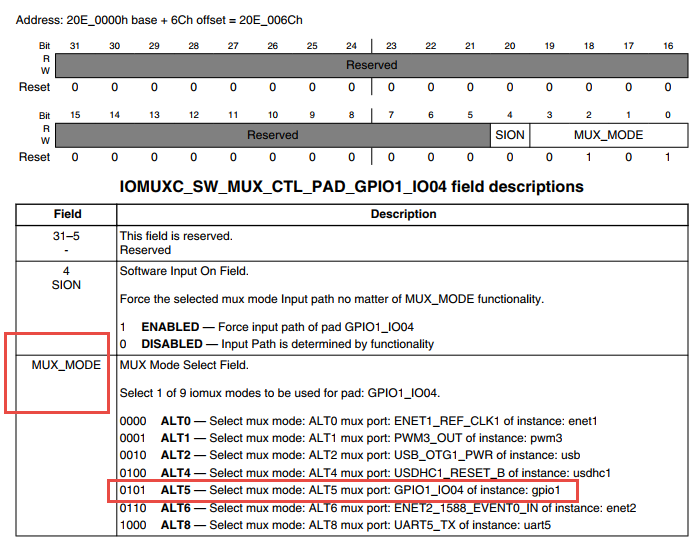
从上图可知IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO04[MUX_MODE]=0101(二进制)时GPIO1_04复用功能是GPIO。所以在程序中我们将0x5写入该寄存即可。
/*************************第八部分*************************/
/*将PAD引脚复用为GPIO*/
ldr r0, =gpio1_io04_mux_ctl_register
ldr r1, =0x5
str r1, [r0]
- 第九部分
设置引脚的PAD属性。
这里设置的是GPIO1_04的引脚PAD属性寄存器“IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO04”
/*************************第九部分*************************/
/*设置GPIO PAD属性*/
ldr r0, =gpio1_io04_pad_ctl_register
ldr r1, =0x1F838
str r1, [r0]
- 第十部分
设置GPIO为输出模式。
/*************************第十部分*************************/
/*将GPIO_GDIR.[4] 设置为1, gpio1_io04设置为输出模式*/
ldr r0, =gpio1_gdir_register
ldr r1, =0x10
str r1, [r0]
- 第十一部分
设置GPIO输出电平为低电平。
/*************************第十一部分*************************/
/*将GPIO_DR 设置为0, gpio1全部输出为低电平*/
ldr r0, =gpio1_dr_register
ldr r1, =0x0
str r1, [r0]
- 第十二部分
从light_led函数返回。在第四部分说到,我们使用“bl”指令跳转到light_led函数执行, “bl”指令是“可返回”的跳转指令,返回地址保存在“LR”(连接寄存器)里。
mov pc, lr将“lr”寄存器的值写入“pc”寄存器即可。
/*************************第十二部分*************************/
/*跳出light_led函数,返回跳转位置*/
mov pc, lr
五、编译下载验证
5.1 编译生成.bin文件
5.1.1 编译文件
编译出在ARM开发板上运行的可执行文件,所以要使用我们安装的交叉编译器arm-linux-gnueabihf-gcc来编译。 编译出的led.o文件并不是我们可以下载到开发板中运行的文件,一个工程中所有的C文件和汇编文件都会编译生成一个对应的.o文件,我们需要将这.o文件链接起来组合成可执行文件。
arm-none-eabi-gcc -g -c led.S -o led.o
- -g :加入GDB能够使用的调试信息,能够使用GDB调试。
- -c :对源程序example.c进行预处理、编译、汇编操作,生成example.o文件。
- led.S :要编译的源文件。
- -o :指定输出文件的文件名,不加“-o led.o”默认会输出led.o。 正常情况下执行该命令后会在当前文件夹下生成led.o文件。
5.1.2 链接文件
arm-linux-gnueabihf-ld用来将众多的.o文件链接到一个指定的链接地址。这里我们要区分“存储地址”和“运行地址”这两个概念,“存储地址”就是可执行文件存储在哪里,可执行文件的存储地址可以随意选择。“运行地址”就是代码运行的时候所处的地址,这个我们在链接的时候就已经确定好了,代码要运行,那就必须处于运行地址处,否则代码肯定运行出错。比如I.MX6ULL支持SD卡、EMMC、NAND启动,因此代码可以存储到SD卡、EMMC或者NAND中,但是要运行的话就必须将代码从SD卡、EMMC或者NAND中拷贝到其运行地址(链接地址)处,“存储地址”和“运行地址”可以一样,比如STM32的存储起始地址和运行起始地址都是0X08000000。上电以后I.MX6ULL的内部boot rom程序会将可执行文件拷贝到链接地址处,这个链接地址可以在I.MX6UL的内部128KB RAM中(0X900000~0X91FFFF),也可以在外部的DDR中。led.elf 文件也不是我们最终烧写到SD卡中的可执行文件,我们要烧写的.bin文件,因此还需要将led.elf文件转换为.bin文件。
arm-none-eabi-ld -Ttext 0x80000000 led.o -o led.elf
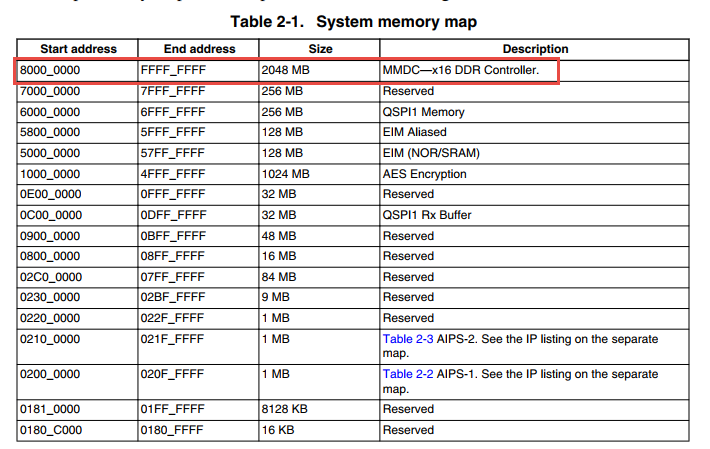
- -Ttext 0x80000000 :
设置程序代码段的起始地址为0x80000000。0x80000000是外部内存的起始地址。这个地址是由芯片本身决定的,我们打开 《IMX6ULRM》手册在Chapter 2 Memory Maps章节ARM平台内存映射表 介绍了这部分内容,如下所示。
- -o :指定输出的文件名。
5.1.3 格式转换
上一步链接生成的.elf文件是带有地址信息的文件,不能放在存储器中执行,要使用格式转换命令转化为二进制文件。
arm-none-eabi-objcopy -O binary -S -g led.elf led.bin
- -O binary :指定输出文件格式为二进制文件。
- -S选项 :不从源文件中复制重定位信息和符号信息。
- -g选项 :不从源文件中复制可调试信息。
5.1.4 反汇编(可跳过)
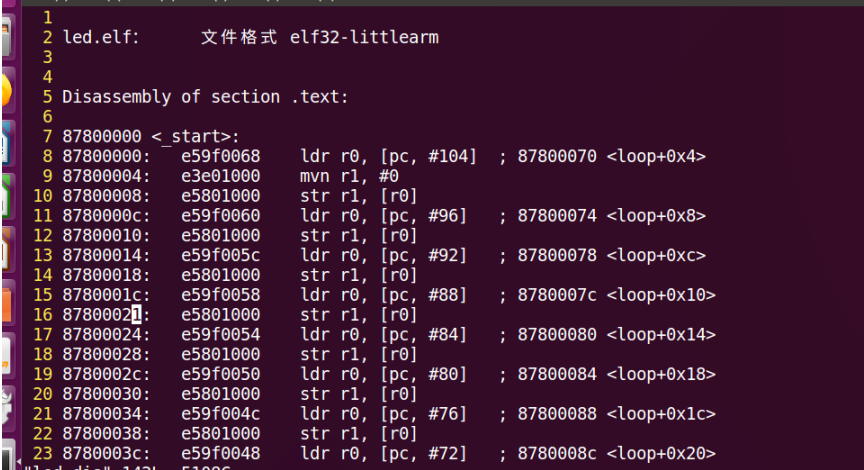
大多数情况下我们都是用C语言写试验例程的,有时候需要查看其汇编代码来调试代码,因此就需要进行反汇编,一般可以将elf文件反汇编。
arm-linux-gnueabihf-objdump -D led.elf > led.dis
- -D :表示反汇编所有的段,反汇编完成以后就会在当前目录下出现一个名为led.dis文件。
5.2 代码烧写
编译成功后会在当前文件夹下生成.bin文件,这个.bin文件也不能直接放到开发板上运行, 这次是因为需要在.bin文件缺少启动相关信息。
为二进制文件添加头部信息并烧写到SD卡。查看 IMX6ULL学习笔记(12)——通过SD卡启动官方SDK程序
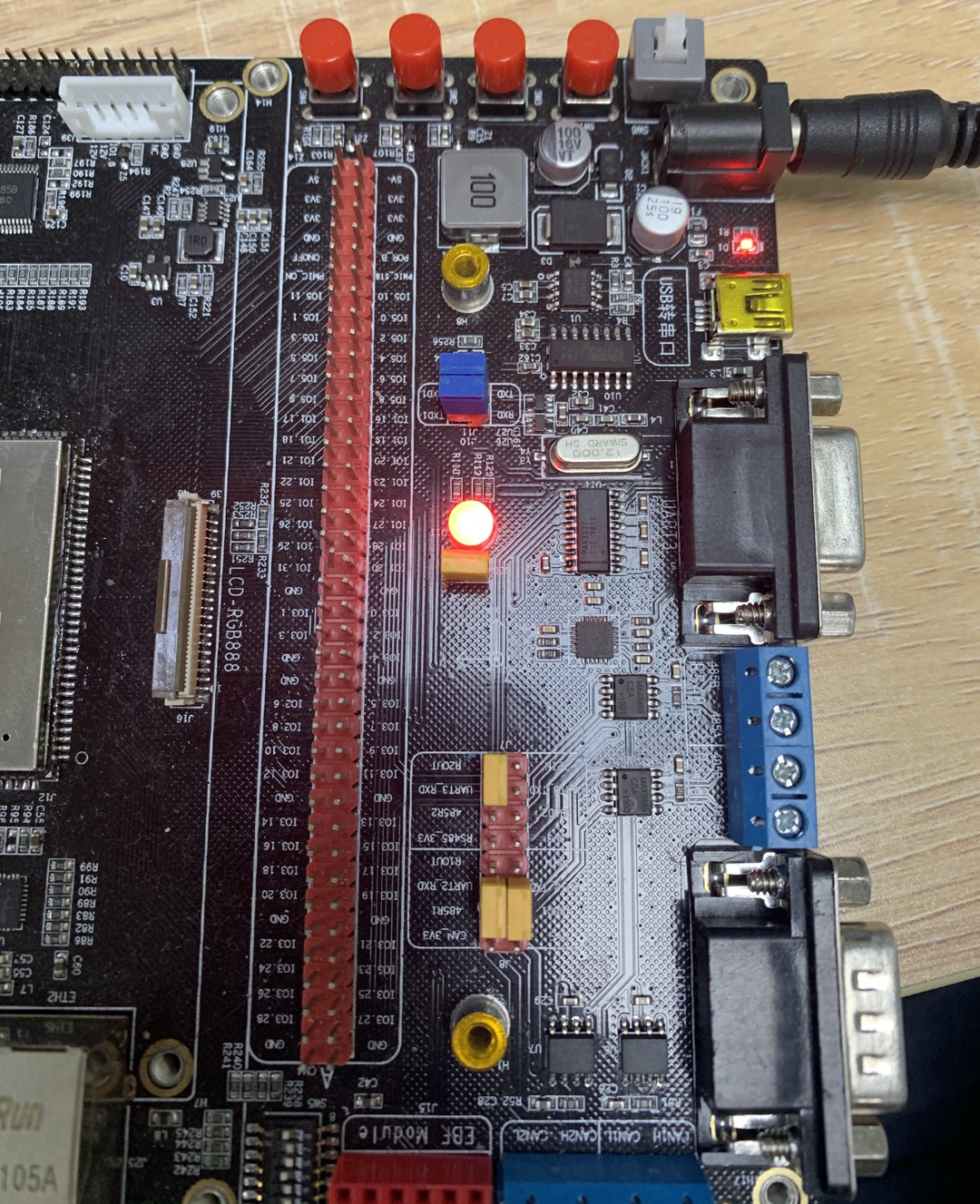
5.3 实验现象
将开发板设置为SD卡启动,接入SD卡,开发板上电,正常情况下可以看到开发板RGB灯红灯亮。
• 由 Leung 写于 2022 年 12 月 12 日
• 参考:4. 汇编点亮LED灯

![[附源码]计算机毕业设计高校学生宿舍管理系统Springboot程序](https://img-blog.csdnimg.cn/c91debfb7081402fa00d1bd443fede6a.png)