参考1. 引言 — 动手学深度学习 2.0.0 documentation
深度强化学习(deep reinforcement learning)将深度学习应用于强化学习的问题,是非常热门的研究领域。 突破性的深度Q网络(Q-network)在雅达利游戏中仅使用视觉输入就击败了人类, 以及 AlphaGo 程序在棋盘游戏围棋中击败了世界冠军,是两个突出强化学习的例子。
强化学习框架的通用性十分强大。 例如,我们可以将任何监督学习问题转化为强化学习问题。 假设我们有一个分类问题,可以创建一个强化学习智能体,每个分类对应一个“动作”。 然后,我们可以创建一个环境,该环境给予智能体的奖励。 这个奖励与原始监督学习问题的损失函数是一致的。
当然,强化学习还可以解决许多监督学习无法解决的问题。 例如,在监督学习中,我们总是希望输入与正确的标签相关联。 但在强化学习中,我们并不假设环境告诉智能体每个观测的最优动作。 一般来说,智能体只是得到一些奖励。 此外,环境甚至可能不会告诉是哪些行为导致了奖励。
以强化学习在国际象棋的应用为例。 唯一真正的奖励信号出现在游戏结束时:当智能体获胜时,智能体可以得到奖励1;当智能体失败时,智能体将得到奖励-1。 因此,强化学习者必须处理学分分配(credit assignment)问题:决定哪些行为是值得奖励的,哪些行为是需要惩罚的。 就像一个员工升职一样,这次升职很可能反映了前一年的大量的行动。 要想在未来获得更多的晋升,就需要弄清楚这一过程中哪些行为导致了晋升。
强化学习可能还必须处理部分可观测性问题。 也就是说,当前的观察结果可能无法阐述有关当前状态的所有信息。 比方说,一个清洁机器人发现自己被困在一个许多相同的壁橱的房子里。 推断机器人的精确位置(从而推断其状态),需要在进入壁橱之前考虑它之前的观察结果。
最后,在任何时间点上,强化学习智能体可能知道一个好的策略,但可能有许多更好的策略从未尝试过的。 强化学习智能体必须不断地做出选择:是应该利用当前最好的策略,还是探索新的策略空间(放弃一些短期回报来换取知识)。
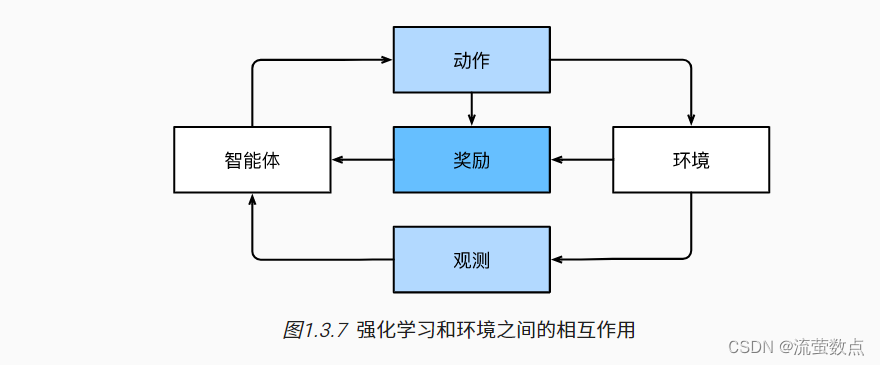
一般的强化学习问题是一个非常普遍的问题。 智能体的动作会影响后续的观察,而奖励只与所选的动作相对应。 环境可以是完整观察到的,也可以是部分观察到的,解释所有这些复杂性可能会对研究人员要求太高。 此外,并不是每个实际问题都表现出所有这些复杂性。 因此,学者们研究了一些特殊情况下的强化学习问题。
当环境可被完全观察到时,强化学习问题被称为马尔可夫决策过程(markov decision process)。 当状态不依赖于之前的操作时,我们称该问题为上下文赌博机(contextual bandit problem)。 当没有状态,只有一组最初未知回报的可用动作时,这个问题就是经典的多臂赌博机(multi-armed bandit problem)。
马尔可夫决策过程
马尔可夫性质(Markov property):如果一个状态的下一个状态只取决于当前状态,跟它当前状态之前的状态都没有关系。换句话说:未来的转移跟过去是独立的,只取决于现在。
马尔可夫链(Markov Chain):一个状态转移链,从起始状态到结束状态。代表状态转换过程。
马尔可夫过程(Markov Process):其实书中并没有和马尔可夫链做太大的区分,对于RL来说,只需要明确它们都是表示存在状态转移就可以。但实际上还是有不同的,马尔科夫链更广泛一点。
举个马尔可夫链的例子:s3,s2,s3,s2,s1。从头到尾的执行过程就可以叫做马尔可夫过程。
马尔可夫奖励过程(Markov reward process)=马尔可夫链+奖励函数
马尔可夫决策过程:马尔科夫链+奖励+决策(动作)
马尔可夫决策也等于马尔可夫奖励+决策

![[附源码]JAVA毕业设计疫情下图书馆管理系统(系统+LW)](https://img-blog.csdnimg.cn/d639117c753741fb8e02963191b07b5d.png)