1. 介绍
1.1 历史
CloudCompare是一个3D点云(和三角形网格)编辑和处理软件。
最初,它被设计用于在密集的3D点云之间进行直接比较。它依赖于一种特定的八叉树结构,在执行这类任务时,这种结构能够提供出色的性能。此外,由于大多数点云是由地面激光扫描仪获取的,CloudCompare旨在处理标准笔记本电脑上的巨大点云——通常超过1000万个点(2005年!)。不久之后,点云和三角形网格之间的比较得到了支持(见下文)。随后,许多其他点云处理算法(配准、重采样、颜色/法向量/标量场管理、统计计算、传感器管理、交互式或自动分割等)以及显示增强工具(自定义颜色斜坡、颜色和法向量处理、校准图片处理、OpenGL着色器、插件等)相继出现。
2. 通用概念
2.1 图形用户界面
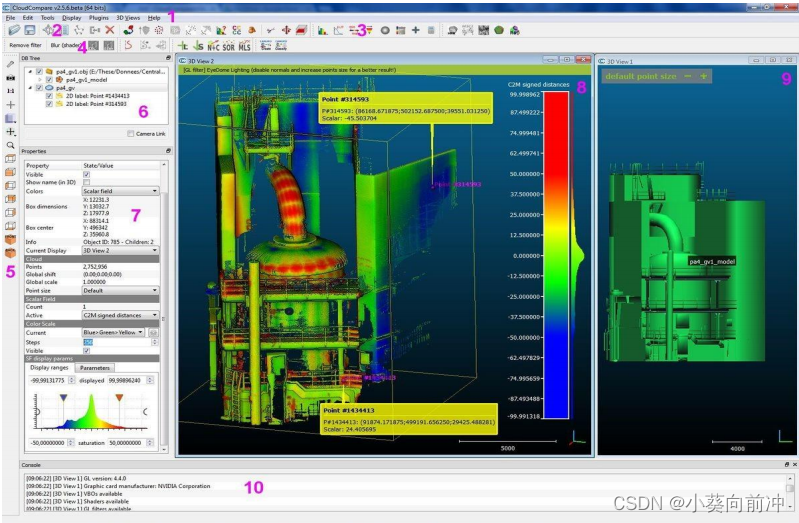
- 菜单·
- 文件(打开,保存,退出等)·
- 编辑(编辑选定的实体及其特征-颜色,法线,标量字段等)·
- 工具(分割,注册,投影等)·
- 显示(显示相关选项)·
- 插件(加载的插件)·
- 3D视图(3D视图管理)·
- 帮助(关于,帮助等)
- 主工具栏(快速访问主要编辑和处理工具:打开/保存,点拾取,克隆等)
- 标量字段工具栏(快速访问标量字段相关工具)
- 插件工具栏(快速访问当前加载的插件-标准和OpenGL着色器)
- 查看工具栏(快速访问与显示相关的工具)
- 数据库树(用于选择和激活实体及其特征)
- 属性视图(关于选定实体的信息
- 默认3D视图
- 另一个3D视图(用3D视图>新建
- 控制台
2.2 实体
点云
点云是一组无组织的三维点(X,Y,Z)。
它可以关联到:·整个实体的唯一颜色(RGB)·每点颜色(RGB)·每点法向量(Nx,Ny,Nz)·每点标量值(一个标量场)-多个标量场可以关联到同一个云
图像
图像可以从标准的图像文件格式(jpg, bmp, png等)通过标准的“文件>打开”机制加载。
它们只能在3D视图中显示为2D覆盖(与3D视图范围匹配)。用户可以改变它们的透明度,以便将后面的3D场景可视化
校准图像
校准图像是与“相机”传感器相关联的标准图像。因此,可以设置当前3D视图的相机参数和位置以匹配传感器参数。这样(校准过的)图片就可以显示在3D场景的上方(具有可定制的透明度)。
校准的图片可以从Bundler . out文件或E57文件加载。它们也可以通过ICM元文件加载。