目录
目录
1.原理
2.代码实现
3.仿真实现
4.仿真结果
5.讨论
1.原理
三相锁相环是一种用于控制交流(AC)信号的相位、频率和波形的电路,其原理和应用也广泛用于电源领域。使用三相锁相环可以使交流电源输出的电压稳定、精准地与输入信号同步,并且减少噪声、谐波和其他干扰。
在电源领域中,三相锁相环应用于以下方面:
-
电网同步:电网同步是指电源系统输出的交流信号与电网输入的交流信号保持同步。三相锁相环可以用于测量输入的电网信号和输出信号的相位差,并加以纠正,使输出电源与电网保持同步。
-
电源输出过程中的纹波、谐波抑制:三相锁相环可以对电源输出的交流信号进行纹波、谐波抑制。通过比较参考信号和输出
-
信号,可以生成一个误差信号并对其进行调节,从而减小输出电源中的纹波和谐波。
-
交流电源的频率锁定:三相锁相环可以锁定输出电源的频率,确保输出信号频率稳定且与所需频率匹配。
-
电源反馈控制:三相锁相环也用于电源反馈控制中,根据输出功率实时调整电源输出电压、电流。
综上所述,三相锁相环在电源领域能够对电源信号进行相位同步、频率锁定、纹波、谐波抑制和反馈控制,保证输出信号质量和稳定性。
2.代码实现
由于三相锁相环实现涉及硬件电路,因此此处提供的C语言代码仅为应用程序范畴内的参考代码。
此处的程序仅实现了一个简单的三相锁相环,其工作主要是将输入信号与参考信号进行比较,然后控制VCO的输出,使之与参考信号同步。实现的示例代码如下:
#include <stdio.h>
#define PI 3.14159265358979323846
int main() {
double f_ref = 50.0; // 参考频率
double f_in = 50.5; // 输入频率
double k_p = 0.1; // 比例系数
double k_i = 0.01; // 积分系数
double k_d = 0.01; // 微分系数
double phase = 0.0; // 相位偏差
double err_prev = 0.0; // 上一个误差
double err_int = 0.0; // 误差的积分值
double err_diff = 0.0; // 误差的微分值
while(1) {
// 比较输入信号和参考信号的相位差
phase = fmod(phase, 2*PI);
double err = atan2(sin(2*PI*f_in), cos(2*PI*f_in)) -
atan2(sin(2*PI*f_ref + phase), cos(2*PI*f_ref + phase));
// 控制VCO
double ctrl = k_p * err + k_i * err_int + k_d * err_diff;
// 更新误差积分和微分值
err_int += err;
err_diff = err - err_prev;
err_prev = err;
// 输出控制信号
printf("Control Signal: %lf\n", ctrl);
// 延时
// 此处应和VCO输出数据频率相匹配
}
return 0;
}
其中,程序通过比较输入信号和参考信号的相位差来计算误差,然后通过比例、积分和微分控制VCO输出,以消除误差。
注意,由于三相锁相环需要与交流电源的正弦波信号同步,因此需要将程序与外部电路相结合,以实现实时输入数据和输出数据的同步。
这里提供了一个简单的三相锁相环参考代码,具体还需根据实际情况进行实现和调试。
以下代码是对之前的代码改进,将三相锁相环的实现封装为了一个函数:
该函数通过传入参考频率、输入频率以及比例、积分、微分系数,返回相应的控制信号,以实现相位同步。这种通过函数封装的方式,不仅方便调用,也使得整个程序更易于理解和维护。
#include <stdio.h>
#include <math.h>
#define PI 3.14159265358979323846
double PLL(double f_ref, double f_in, double k_p, double k_i, double k_d) {
// 初始化
double phase = 0.0;
double err_prev = 0.0;
double err_int = 0.0;
double err_diff = 0.0;
// 计算相位同步
while(1) {
double phase_in = phase + 2*PI*f_in;
double t_ref = 1/f_ref;
double t_in = 1/f_in;
int cnt = (int)(phase_in/t_ref);
double phase_ref = 2*PI*f_ref*(phase_in - t_ref*cnt)/f_in;
double err = phase_ref - phase;
// 控制VCO
double ctrl = k_p * err + k_i * err_int + k_d * err_diff;
// 更新误差积分和微分值
err_int += err;
err_diff = err - err_prev;
err_prev = err;
// 更新相位
phase += 2*PI*(f_ref + ctrl);
// 返回控制信号
return ctrl;
}
}
int main() {
// 测试
double f_ref = 50.0; // 参考频率
double f_in = 50.5; // 输入频率
double k_p = 0.1; // 比例系数
double k_i = 0.01; // 积分系数
double k_d = 0.01; // 微分系数
printf("Control Signal: %lf\n", PLL(f_ref, f_in, k_p, k_i, k_d));
return 0;
}
采用中断方式实现上述代码:
#include <stdio.h>
#include <math.h>
#include "stm32f4xx.h"
#define PI 3.14159265358979323846
double f_ref = 50.0; // 参考频率
double f_in = 50.5; // 输入频率
double k_p = 0.1; // 比例系数
double k_i = 0.01; // 积分系数
double k_d = 0.01; // 微分系数
double phase = 0.0; // 相位偏差
double err_prev = 0.0; // 上一个误差
double err_int = 0.0; // 误差的积分值
double err_diff = 0.0; // 误差的微分值
volatile double ctrl = 0.0; // 控制信号
void TIM3_IRQHandler(void) {
// 计算相位同步
double phase_in = phase + 2 * PI * f_in;
double t_ref = 1 / f_ref;
double t_in = 1 / f_in;
int cnt = (int)(phase_in / t_ref);
double phase_ref = 2 * PI * f_ref * (phase_in - t_ref * cnt) / f_in;
double err = phase_ref - phase;
// 控制VCO
ctrl = k_p * err + k_i * err_int + k_d * err_diff;
// 更新误差积分和微分值
err_int += err;
err_diff = err - err_prev;
err_prev = err;
// 更新相位
phase += 2 * PI * (f_ref + ctrl);
// 清除中断标志位
TIM3->SR &= ~TIM_SR_UIF;
}
int main(void) {
// 使能定时器时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
// 定时器配置
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_TimeBaseInitStruct.TIM_Period = 1000 - 1; // 定时器周期 1ms
TIM_TimeBaseInitStruct.TIM_Prescaler = 42000 - 1; // 分频系数 42MHz/42000=1KHz
TIM_TimeBaseInitStruct.TIM_ClockDivision = 0;
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStruct);
// 使能定时器中断
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);
// 使能定时器
TIM_Cmd(TIM3, ENABLE);
while (1) {
// 在此处进行相应操作,例如控制输出等
}
}
在该程序中,定时器TIM3的时钟频率为42MHz,定时器周期为1ms,因此定时器中断会每1ms触发一次,然后在中断服务程序中进行三相锁相环算法的计算,并将计算结果存储在控制信号变量ctrl中,可以在后续的代码中进行控制输出等操作。
3.仿真实现
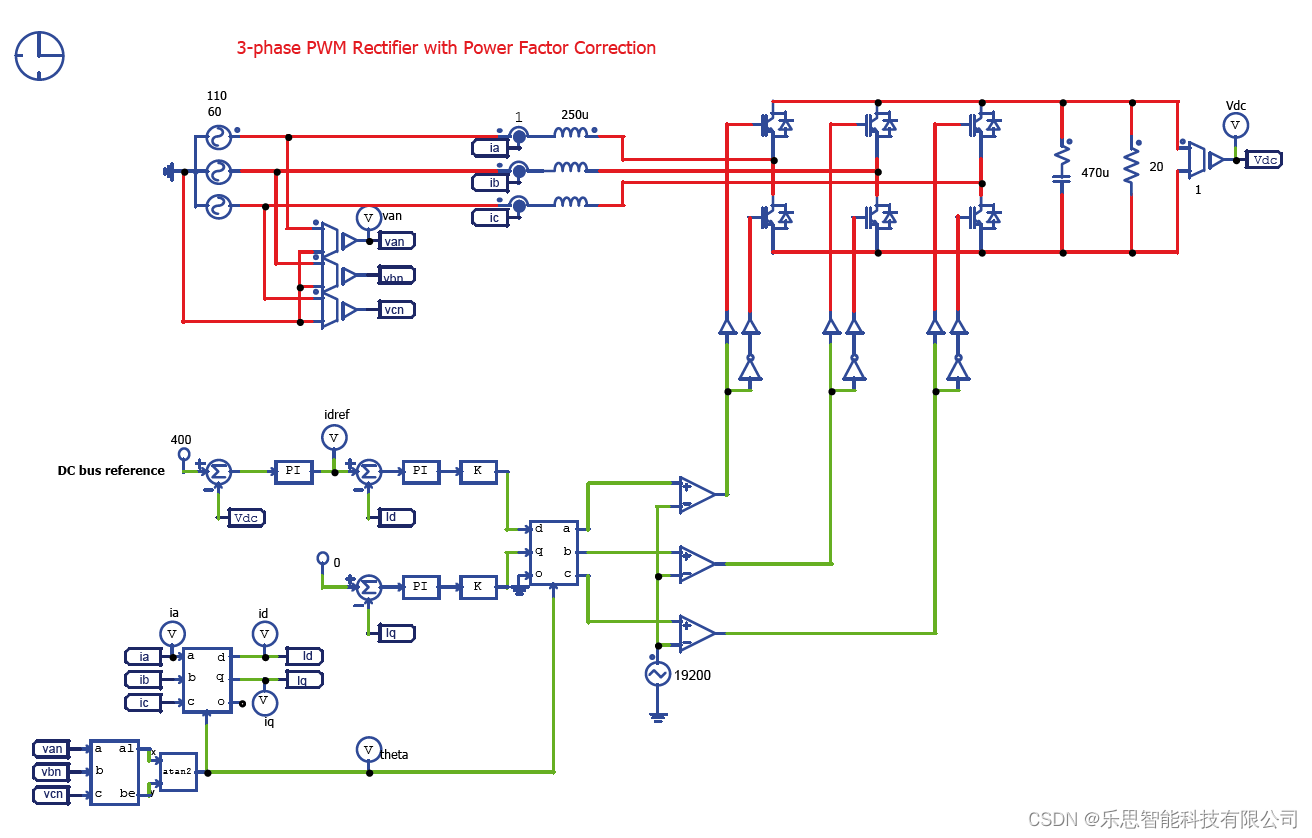

锁相角为theta
4.仿真结果
锁相成功,锁住A相-270度位置。

5.讨论
如果大家在开发的过程中遇到类似的问题,欢迎一起交流。请先私信我,再行联系。