机器学习(Gradient Descent)
| video | ppt | blog |
|---|
梯度下降(Gradient Descent)
optimization problem:

损失函数最小化
假设本模型有两个参数𝜃1和𝜃2,随机取得初始值
求解偏微分,梯度下降对参数进行更新

Visualize:
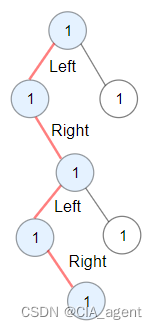
确定梯度方向,红色表示Gradient方向,蓝色是梯度下降的方向,因为我们要是损失函数L减小,使用应该取与Gradient方向相反的方向,这也对应着进行参数更新时用的是
-(减号)
其中:η 叫做Learning rates(学习速率)

Small Tips
Tip 1:Tuning your learning rates
下面是两幅图,我们来简单看一下
- 图左边黑色为损失函数的曲线,假设从左边最高点开始:(一维)
- 学习率刚刚好,比如红色的线,就能顺利找到最低点。
- 学习率太小,比如蓝色的线,也可以顺利找到最低点,就会走的太慢,时间成本太高。
- 学习率有点大,比如绿色的线,出现了跳过最低点,反复进行横跳,很难到达最低点。
- 学习率非常大,比如黄色的线,直接就飞出去了,更新参数的时候只会发现
损失函数越更新越大。- 当参数为一维或者二维的时候,我们可以很直观地建立图形进行观察,但是超过了三维以后,我们就无法进行可视化,但是右图是始终可以建立的,分别表示了不同学习率下参数更新以后损失函数的变化情况。将参数改变对损失函数的影响进行可视化。比如学习率太小(蓝色的线),损失函数下降的非常慢;学习率太大(绿色的线),损失函数下降很快,但马上就卡住不下降了;学习率特别大(黄色的线),损失函数就飞出去了;红色的就是差不多刚好,可以得到一个好的结果。

我们可能会猜想,学习率很重要,既不能太大,跳出最优解,也不能太小,收敛过慢,那有没有一种可能实现学习率地改变呢?
Adaptive Learning Rates
在训练的过程中,我们需要实现学习率的自适应变化:
- Reduce the learning rate by some factor every few epochs.
- 前期初始点可能距离最低点较远,我们可以将学习率设置大一些,使得损失函数更快收敛。
- update参数以后,离最低点较近,此时,我们应该调整学习率变小,防止跳过了最低点。
- Learning rate cannot be one-size-fits-all
- 给不同的参数分配不同的学习率
自适应学习率算法-Adagrad
下面有两种方法,第一种是针对一个参数的,但是我们要学习的是第二种,实现参数独立的自适应学习率算法

w是一个参数
𝜎t :之前参数的所有微分的均方根,对于每个参数都是不一样的。
普通梯度下降如Vanilla Gradient descent
使用Adagrad算法:每个参数的学习率都把除以之前微分的均方根。

变形

Contradiction
按照正常的理解,梯度越大,说明可能离最低点越远,那么我们变化的步伐也应该越大,梯度越小,说明可能离最低点越远,那么我们变化的步伐也应该越小,但是在Adagrad算法里面,当梯度越大的时候,步伐应该越大,但下面分母又导致当梯度越大的时候,步伐会越小,前后有点矛盾了。
解释:
此处我们的步长是相对的,我们当前的梯度的大小也是相对于前面的梯度大小来调整步长
- 构造反差效果
- 通过实例看出最优步长与一次微分成正比,与二次微分成反比,这里采用之前所有一次微分的均方根估计二次微分
- 正比解释:一次微分越大,说明可能离最低点越远,步伐越大
- 反比解释:二次微分越小,一次微分变化越慢,一次微分也就倾向于保留较大的趋势,步伐也就越大
- 同一参数,可以通过比较其一次微分比较其距离最优值的距离;不同参数还需要考虑二次微分。
Do not cross parameters
- 第2点我们提到了Use first derivative to estimate second derivative
- 一个较为复杂的参数模型,我们在进行求解的时候,算一次偏微分可能就需要很长的时间,所以二次偏微分一般不可取
- 一般情况下,在一定的范围内取一次偏微分,进行平方求和开根号,在一定的程度上面也可以反映二次偏微分的大小




Tip 2:Stochastic Gradient Descent(SGD)
基本思想:损失函数没处理一个批次的数据就进行一次更新,
- 普通的算法在进行参数更新的时候是一次遍历所有的例子,然后更新,实现一次更新,步伐一般较大。
- SGD算法进行参数更新的时候每遍历一个例子就进行一次更新,实现多次更新,一般步伐较小。


Tip 3:Feature Scaling

存在多个变量的时候,很可能出现的一种情况就是,他们的取值范围不一样,一个可以很大,一个可以很小,那么我们在对他们的对应参数进行相同变化的时候,而y的变化的情况却大不相同。

左图: x1的scale比x2要小很多,所以当 w1和 w2做同样的变化时,w1对 y 的变化影响是比较小的(w1对损失函数L有较小的微分,在w1方向上梯度较小,图像较为平滑),x2 对 y 的变化影响是比较大的(w2对损失函数L有较大的微分,在w2方向上梯度较大,图像上有比较陡峭的峡谷)
右图:二者scale相近,各点处梯度大致相同
来源
Normalize

计算每一个维度变量的
- 均值:mi
- 标准差: σi
进行相应的变化
这样所有维度的均值都是0,方差都是1。

Gradient Descent Theory
当我们在使用梯度下降算法进行参数优化的时候,每一次的优化并不能百分百保证使得损失函数越来越小。

我们在一般情况下,我们无法一瞬间找到全局最优解,可以做到的是给定某个初始值和某个范围,我们可以找到局部最低点。
How to y find the point with the smallest value nearby?
Taylor Series
一个变量的泰勒展开

Taylor多项式在点x=x0上逼近函数的值。多项式的阶次越高,多项式中的项越多,逼近函数的实际值越近。

两个变量的泰勒展开

Gradient Desent

我们在前面提到了,给定某个初始值和某个范围,如果这个范围足够小,那么我们是不是可以用泰勒展开对损失函数表达式进行替换

以d为半径,做一个足够小的圆形区域,在这个区域上面,我们可以使用泰勒展开

s可以看作定值,后面可以看作
向量点乘(不记得的去百度一下)
点乘还有一种计算方法就是:两向量的模相乘再乘以夹角的余弦值,其中(u,v)是一节偏微分,是梯度,所以要让点乘结果最小,我们可以让两向量方向相反,夹角余弦值为-1,让另一向量模最大,但是有边界限制。

现在我们可以更好理解使用泰勒展开的意义了,最后得到的向量的方向也就是我们向最低点移动的方向,但是不要忘记了我们使用泰勒展开的前提
范围足够小,同样也要求我们学习率也要足够小,这样才能保证泰勒展开的精度是足够的
More Limitation of Gradient Descent
- 微分值为0,可能是极值点,但不一定是全局极值,也可能仅仅只是微分值为0的非极值点
- 在实际的ML中,当微分值小于某一个数值就停下来了,但这里只是比较平缓,并不是极值点