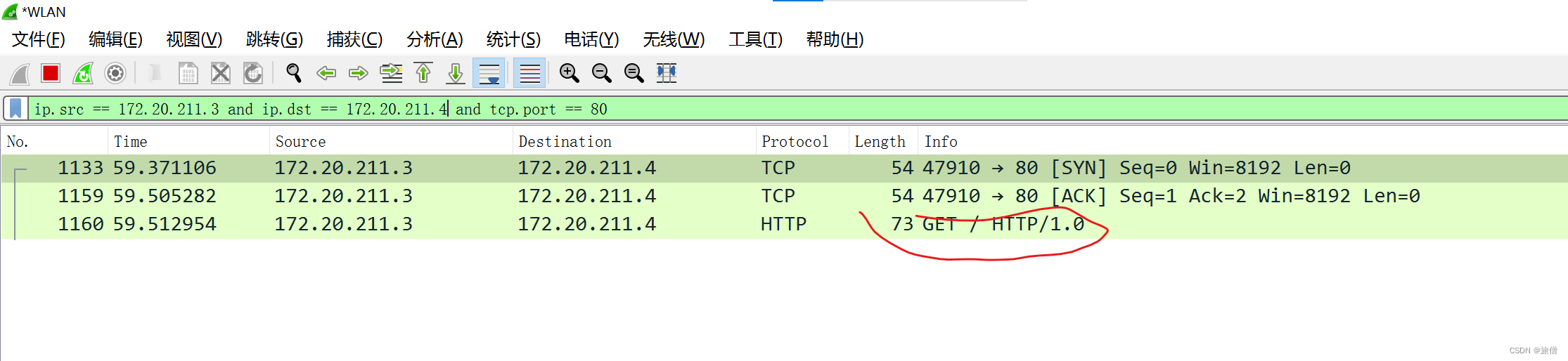
tcp三次握手python实现和结果
news2026/2/12 21:52:10

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/811722.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
火爆全网,Charles抓包教程-辅助接口测试(二)
目录:导读 前言一、Python编程入门到精通二、接口自动化项目实战三、Web自动化项目实战四、App自动化项目实战五、一线大厂简历六、测试开发DevOps体系七、常用自动化测试工具八、JMeter性能测试九、总结(尾部小惊喜) 前言
功能图标 从左到右…
mysql综合练习语法总结
mysql综合练习
用于
小白练手的主要用于以后语法忘了回来看
题目
# 1、创建数据库test01_library
# 2、创建表 books,表结构如下:# 3、向books表中插入记录
# 1)不指定字段名称,插入第一条记录
# 2)指定所有字段名…
经典的数组和指针结合的OJ题
一、合并两个有序数组
leetcode链接
题目描述:
给你两个按 非递减顺序 排列的整数数组 nums1 和 nums2,另有两个整数 m 和 n ,分别表示 nums1 和 nums2 中的元素数目。
请你 合并 nums2 到 nums1 中,使合并后的数组同样按 非递…

seata组件使用期间,获取全局事务状态
GlobalStatus枚举类展示全局事务状态 官网链接:http://seata.io/zh-cn/docs/user/appendix/global-transaction-status.html
获得全局事务状态
// 开启全局事务地方获取全局事务xid
String xid RootContext.getXID();
// 通过全局事务xid获得GlobalStatus枚举类
…

Transformer 论文学习笔记
重新学习了一下,整理了一下笔记 论文:《Attention Is All You Need》 代码:http://nlp.seas.harvard.edu/annotated-transformer/ 地址:https://arxiv.org/abs/1706.03762v5 翻译:Transformer论文翻译
特点࿱…
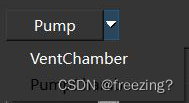
【Qt】利用Tool Button控件创建下拉菜单按钮
功能描述
利用qt进行界面设计和开发,创建下拉按钮。
详细实现
1、在qt侧工具栏利用设计打开.ui文件
2、创建按钮
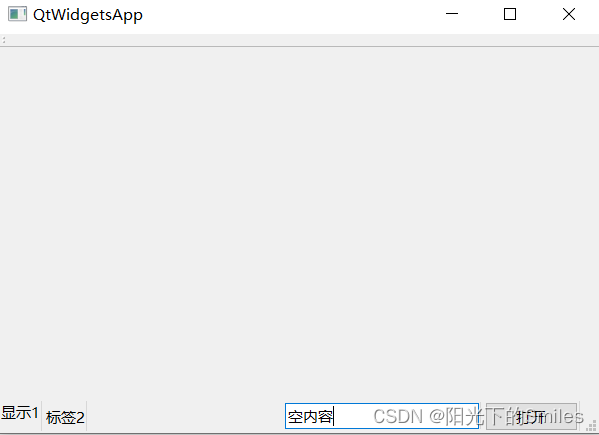
创建一个Tool Button按钮,并在属性窗口中的QToolButton栏中选中MenuButtonPopup属性。
3、创建action
在Action编辑器创建对应的ac…

Dual pyramid GAN for semantic image synthesis
为了解决在图像合成时候小物体容易消失,大物体经常作为块的拼接来生成的。本文提出DP-GAN在所有尺度下共同学习空间自适应归一化模块的条件。这样尺度信息就会被双向使用,他统一了不同尺度的监督。(重点看图和代码) SPADE模块解释 GAN在生成包含许多不同…

JavaScript学习 -- 对称加密算法DES
在现代的互联网时代,数据安全性备受关注。为了保护敏感数据的机密性,对称加密算法是一种常用的方法。在JavaScript中,DES(Data Encryption Standard)是一种常用的对称加密算法。本篇博客将为您展示如何在JavaScript中使…
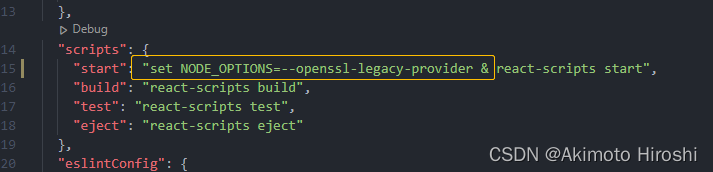
npm i 报错项目启动不了解决方法
1.场景
在另一台电脑低版本node环境跑的react项目,换到另一台电脑node18环境执行npm i时候报错 2.解决方法
脚本前加上set NODE_OPTIONS--openssl-legacy-provider
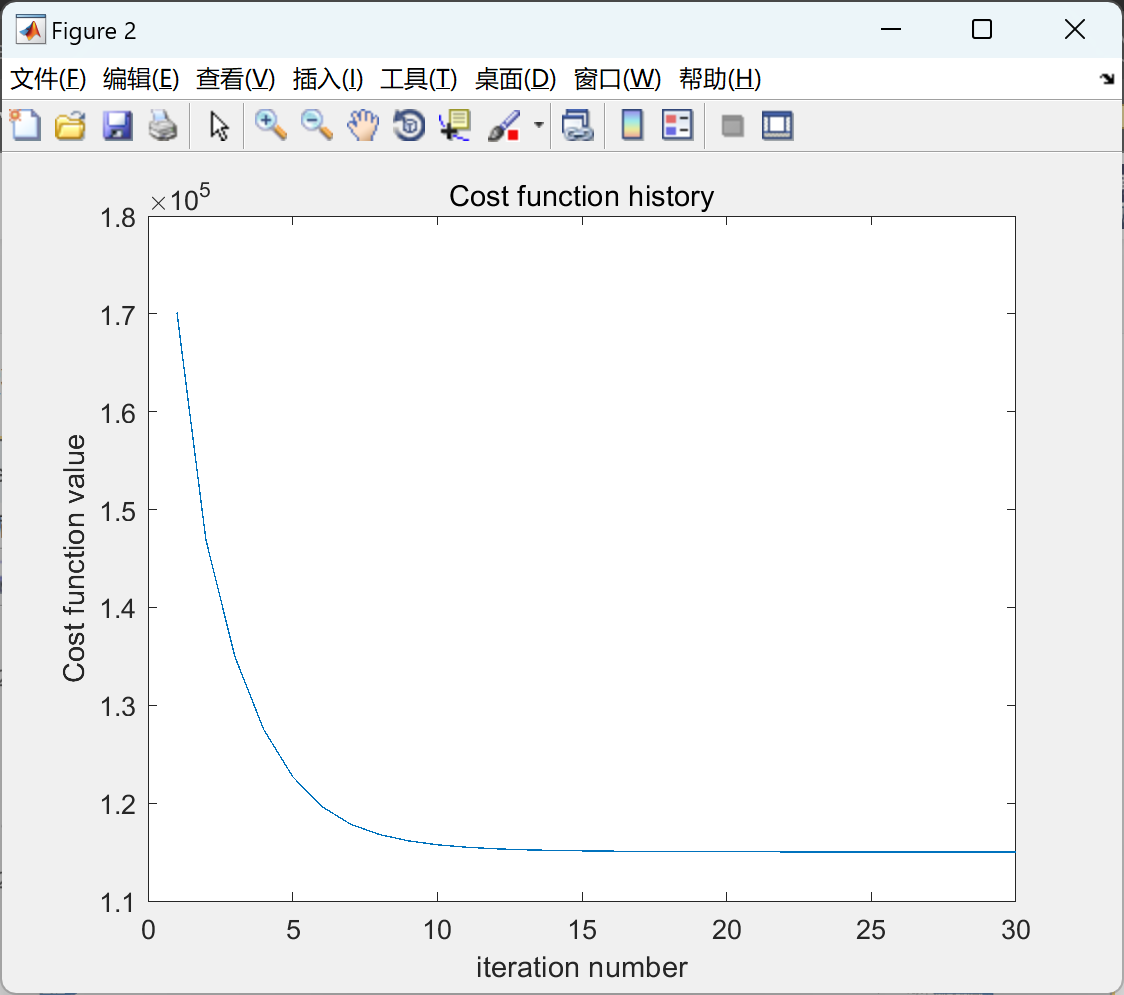
使用稀疏性(微球)进行色谱图基线估计和去噪(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…

树莓派上安装cmake
前言
记录一下在树莓派上安装cmake,因为之间安装出了点问题,但是后面解决了,于是记录一下。 直接安装报大红,看的我心里一颤 废话不多说,接下来上操作步骤
网上有的教程让wget下载压缩包,但是咱们就是不知道为啥我这样操作就是也报错,但是我感觉原理上是🆗的,并且…

Java程序逻辑控制(三种基本结构(顺序、分支、循环)、输入输出、循环输入)
目录 一、顺序结构
二、分支结构
1、 if 语句
2、switch 语句
与C语言不同,不能作为switch参数的类型:float double long boolean
三、循环结构
1.while循环
2.for循环 四、输入输出
1.输出 - 将结果显示打印到屏幕上
2.输入
3.输入输出综合…

用友畅捷通T+服务器数据库中了locked勒索病毒怎么办,如何处理解决
计算机技术的发展,也为网络安全埋下隐患,其中勒索病毒攻击已经成为企业和组织面临的严重威胁之一。作为一款被广泛使用的企业资源管理软件,用友畅捷通T系统也成为黑客攻击的目标之一。近期,我们收到很多企业的求助,公司…
Shell脚本实现分库分表操作
目录
一,分库备份
二,分库操作
三,分库分表备份
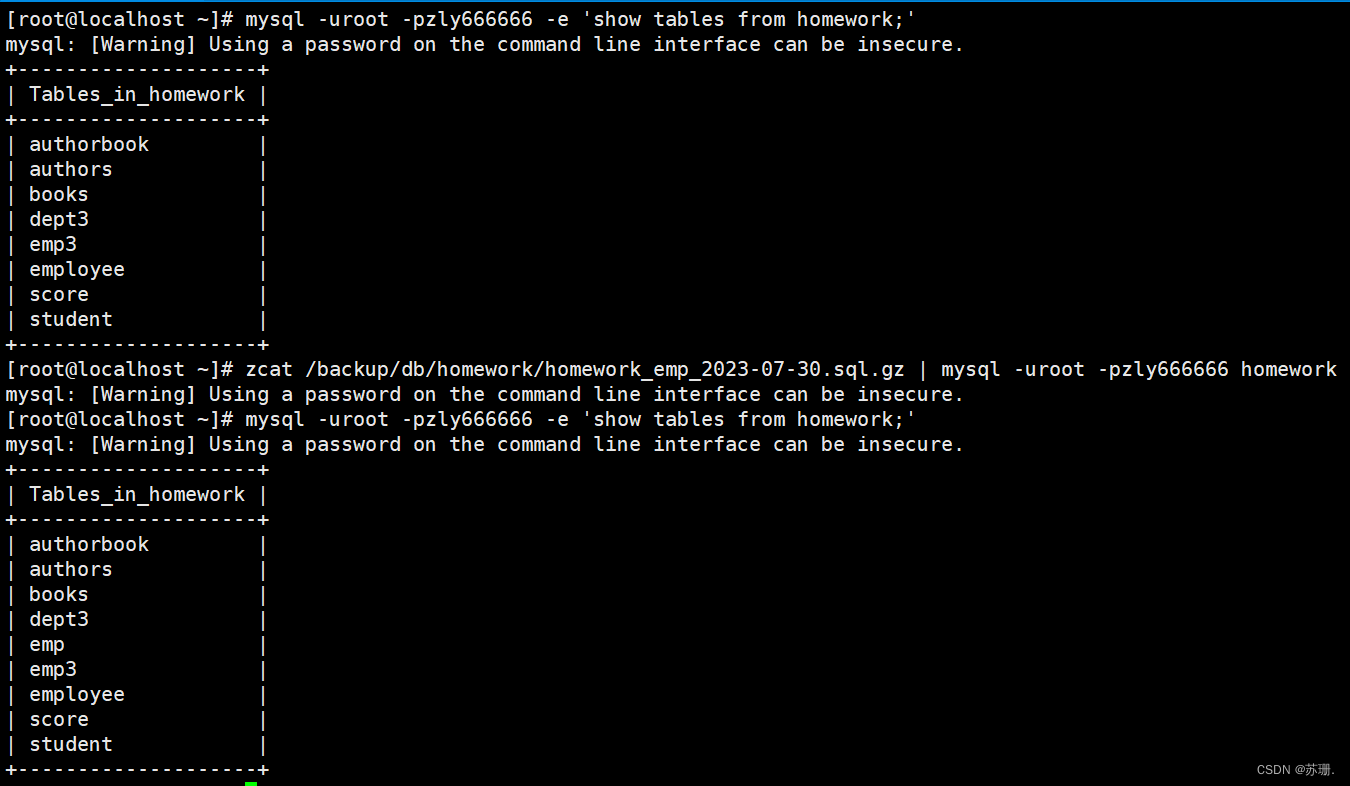
四,备份还原 一,分库备份
#!/bin/bash
mysql_cmd-uroot -pzly666666
bak_path/backup/db
[ -d ${bak_path} ] || mkdir -p ${bak_path}mysql ${mysql_cmd} -e show…
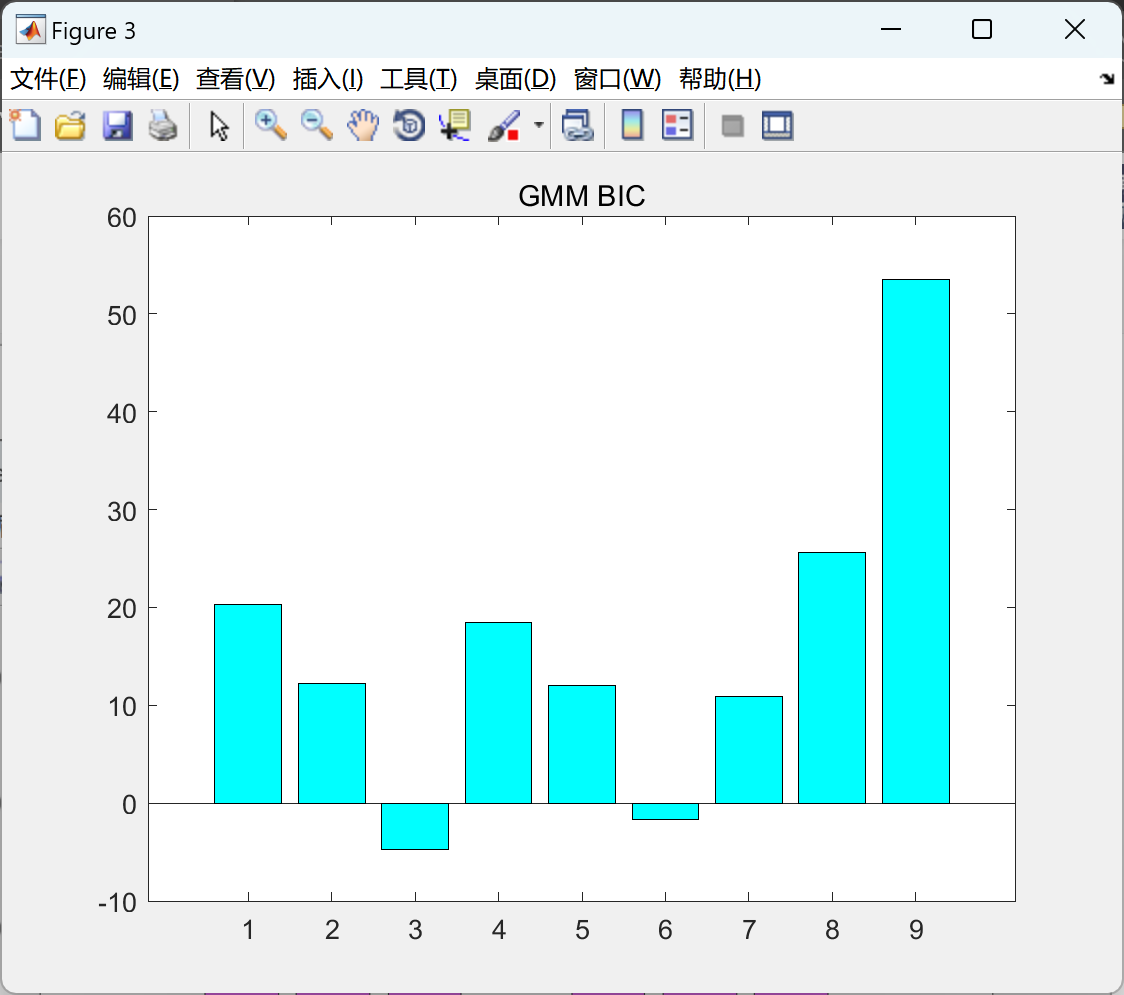
【CNN-BiLSTM-attention】基于高斯混合模型聚类的风电场短期功率预测方法(Pythonmatlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…
FFmpeg 音视频开发工具
目录
FFmpeg 下载与安装
ffmpeg 使用快速入门
ffplay 使用快速入门 FFmpeg 全套下载与安装
1、FFmpeg 是处理音频、视频、字幕和相关元数据等多媒体内容的库和工具的集合。一个完整的跨平台解决方案,用于录制、转换和流式传输音频和视频。 官网:http…
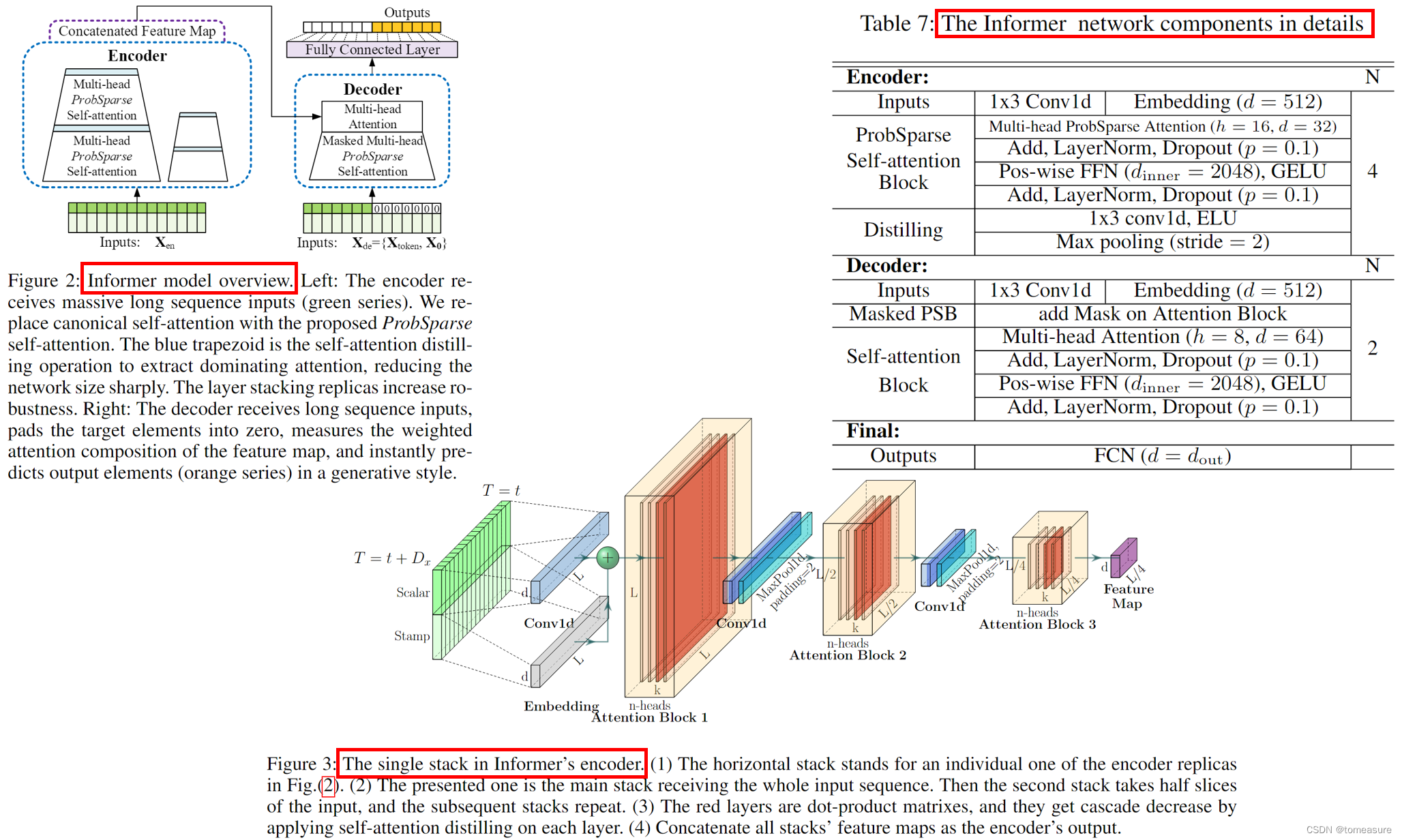
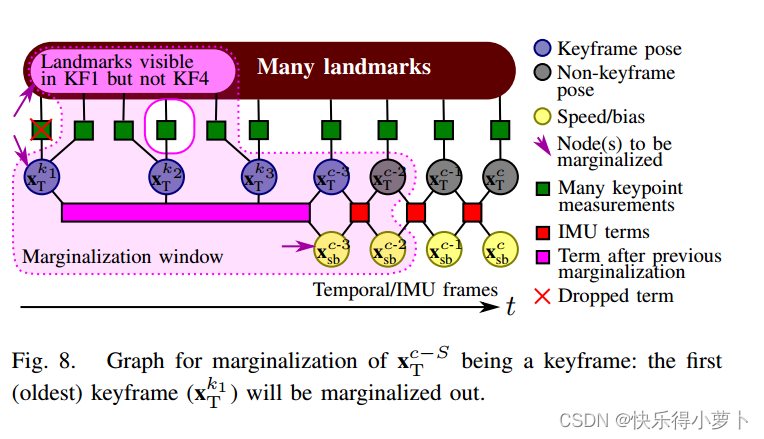
Informer 论文学习笔记
论文:《Informer: Beyond Efficient Transformer for Long Sequence Time-Series Forecasting》 代码:https://github.com/zhouhaoyi/Informer2020 地址:https://arxiv.org/abs/2012.07436v3 特点:
实现时间与空间复杂度为 O ( …