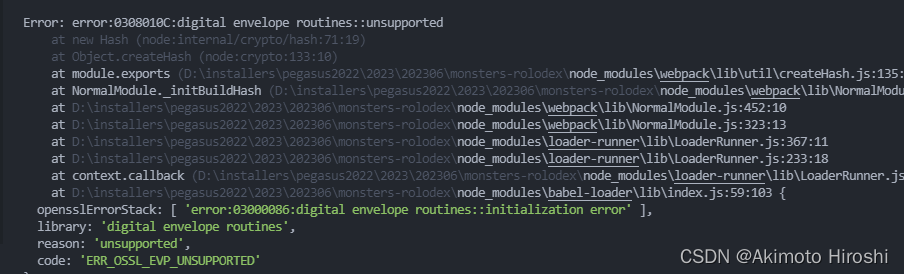
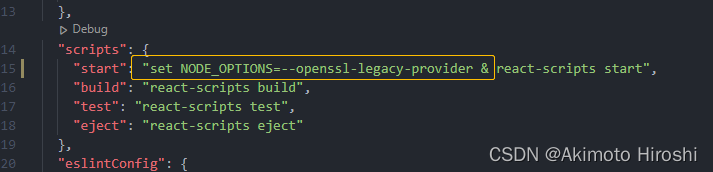
npm i 报错项目启动不了解决方法
news2026/2/12 12:07:55
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/811700.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
使用稀疏性(微球)进行色谱图基线估计和去噪(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…

树莓派上安装cmake
前言
记录一下在树莓派上安装cmake,因为之间安装出了点问题,但是后面解决了,于是记录一下。 直接安装报大红,看的我心里一颤 废话不多说,接下来上操作步骤
网上有的教程让wget下载压缩包,但是咱们就是不知道为啥我这样操作就是也报错,但是我感觉原理上是🆗的,并且…

Java程序逻辑控制(三种基本结构(顺序、分支、循环)、输入输出、循环输入)
目录 一、顺序结构
二、分支结构
1、 if 语句
2、switch 语句
与C语言不同,不能作为switch参数的类型:float double long boolean
三、循环结构
1.while循环
2.for循环 四、输入输出
1.输出 - 将结果显示打印到屏幕上
2.输入
3.输入输出综合…

用友畅捷通T+服务器数据库中了locked勒索病毒怎么办,如何处理解决
计算机技术的发展,也为网络安全埋下隐患,其中勒索病毒攻击已经成为企业和组织面临的严重威胁之一。作为一款被广泛使用的企业资源管理软件,用友畅捷通T系统也成为黑客攻击的目标之一。近期,我们收到很多企业的求助,公司…
Shell脚本实现分库分表操作
目录
一,分库备份
二,分库操作
三,分库分表备份
四,备份还原 一,分库备份
#!/bin/bash
mysql_cmd-uroot -pzly666666
bak_path/backup/db
[ -d ${bak_path} ] || mkdir -p ${bak_path}mysql ${mysql_cmd} -e show…
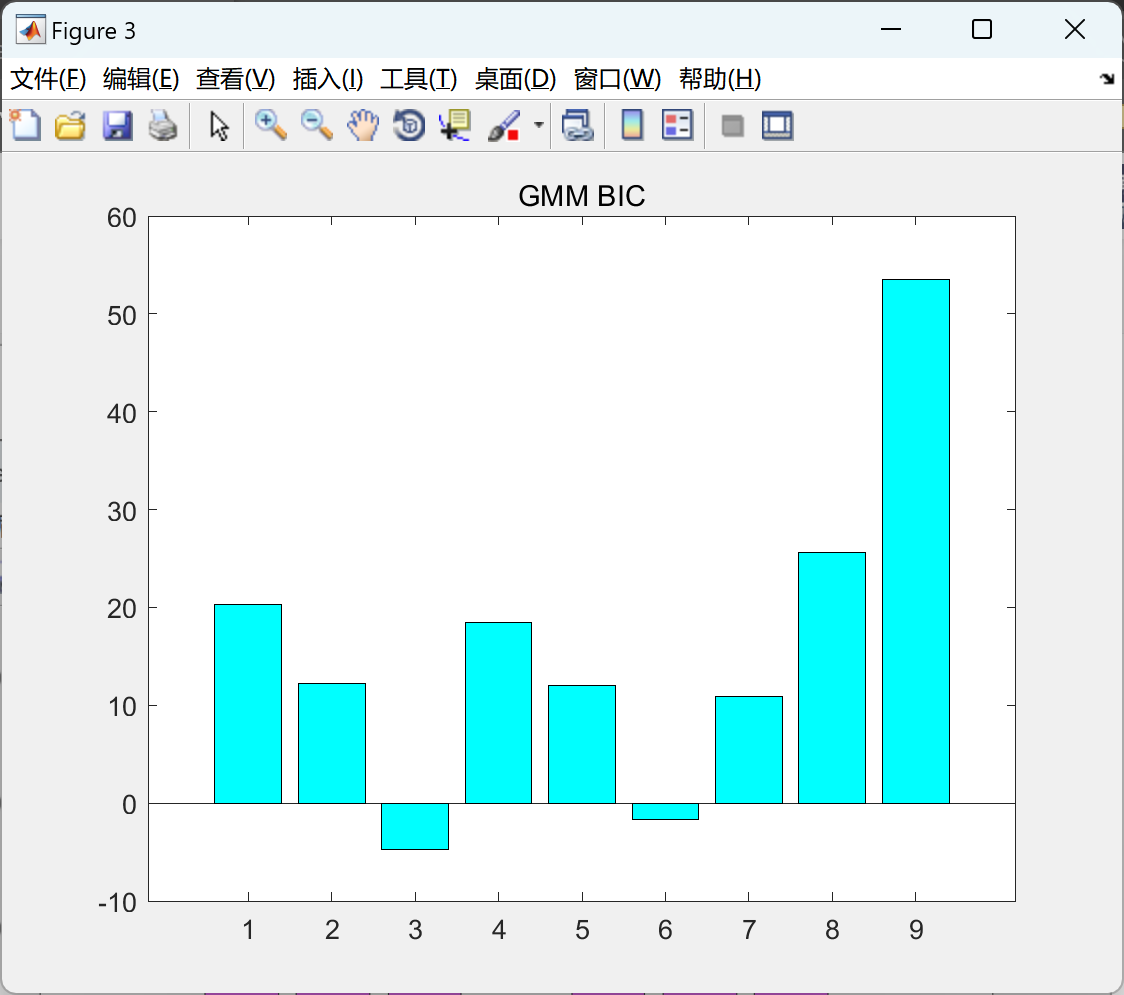
【CNN-BiLSTM-attention】基于高斯混合模型聚类的风电场短期功率预测方法(Pythonmatlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…
FFmpeg 音视频开发工具
目录
FFmpeg 下载与安装
ffmpeg 使用快速入门
ffplay 使用快速入门 FFmpeg 全套下载与安装
1、FFmpeg 是处理音频、视频、字幕和相关元数据等多媒体内容的库和工具的集合。一个完整的跨平台解决方案,用于录制、转换和流式传输音频和视频。 官网:http…
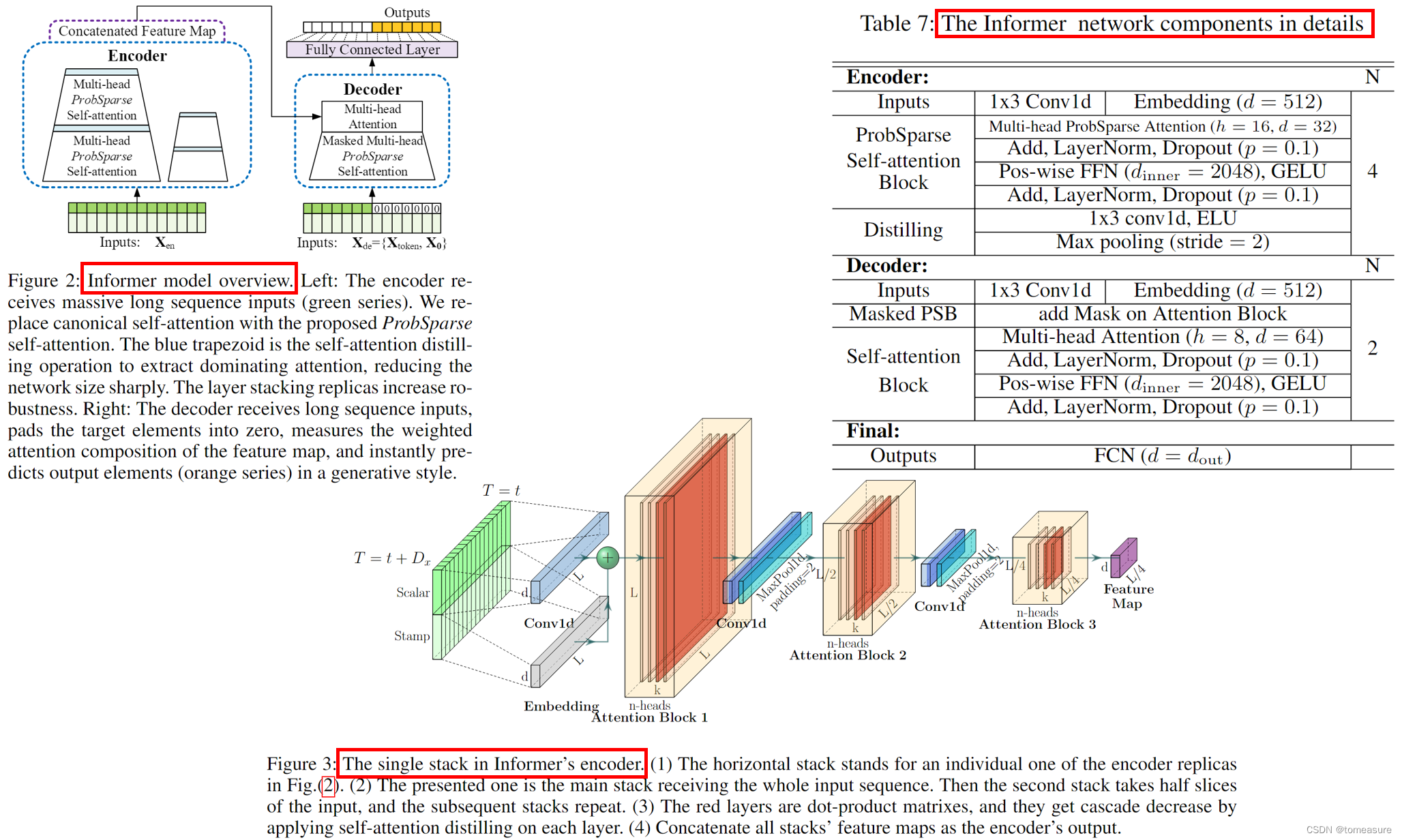
Informer 论文学习笔记
论文:《Informer: Beyond Efficient Transformer for Long Sequence Time-Series Forecasting》 代码:https://github.com/zhouhaoyi/Informer2020 地址:https://arxiv.org/abs/2012.07436v3 特点:
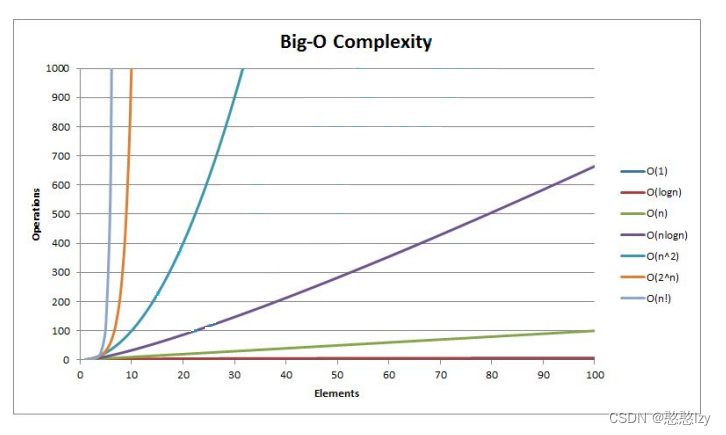
实现时间与空间复杂度为 O ( …
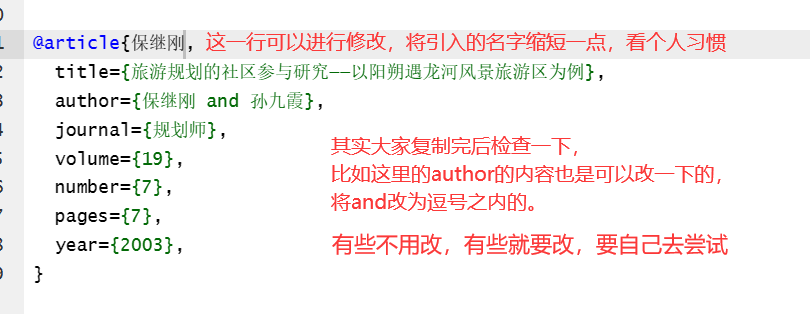
LaTex4【下载模板、引入文献】
下载latex模板:(模板官网一般都有,去找)
我这随便找了一个: 下载得到一个压缩包,然后用overleaf打开👇: (然后改里面的内容就好啦) 另外,有很多在线的数学公式编辑器&am…

1 Python的前世今生
为什么要学Python 这个问题,仁者见仁,智者见智。编程界有一句名言:“人生苦短,我用Python”,这句话似乎道出了一些原因。Python是一门简单直观的语言,更是一门注重可读性和效率的语言。解决同一个问题&…

jmeter常用的性能测试监听器
jmeter中提供了很多性能数据的监听器,我们通过监听器可以来分析性能瓶颈
本文以500线程的阶梯加压测试结果来描述图表。 常用监听器
1:Transactions per Second
监听动态TPS,用来分析吞吐量。其中横坐标是运行时间,纵坐标是TPS…

【后端面经】微服务构架 (1-6) | 隔离:如何确保心悦会员体验无忧?唱响隔离的鸣奏曲!
文章目录 一、前置知识1、什么是隔离?2、为什么要隔离?3、怎么进行隔离?A) 机房隔离B) 实例隔离C) 分组隔离D) 连接池隔离 与 线程池隔离E) 信号量隔离F) 第三方依赖隔离二、面试环节1、面试准备2、基本思路3、亮点方案A) 慢任务隔离B) 制作库与线上库分离三、章节总结 …
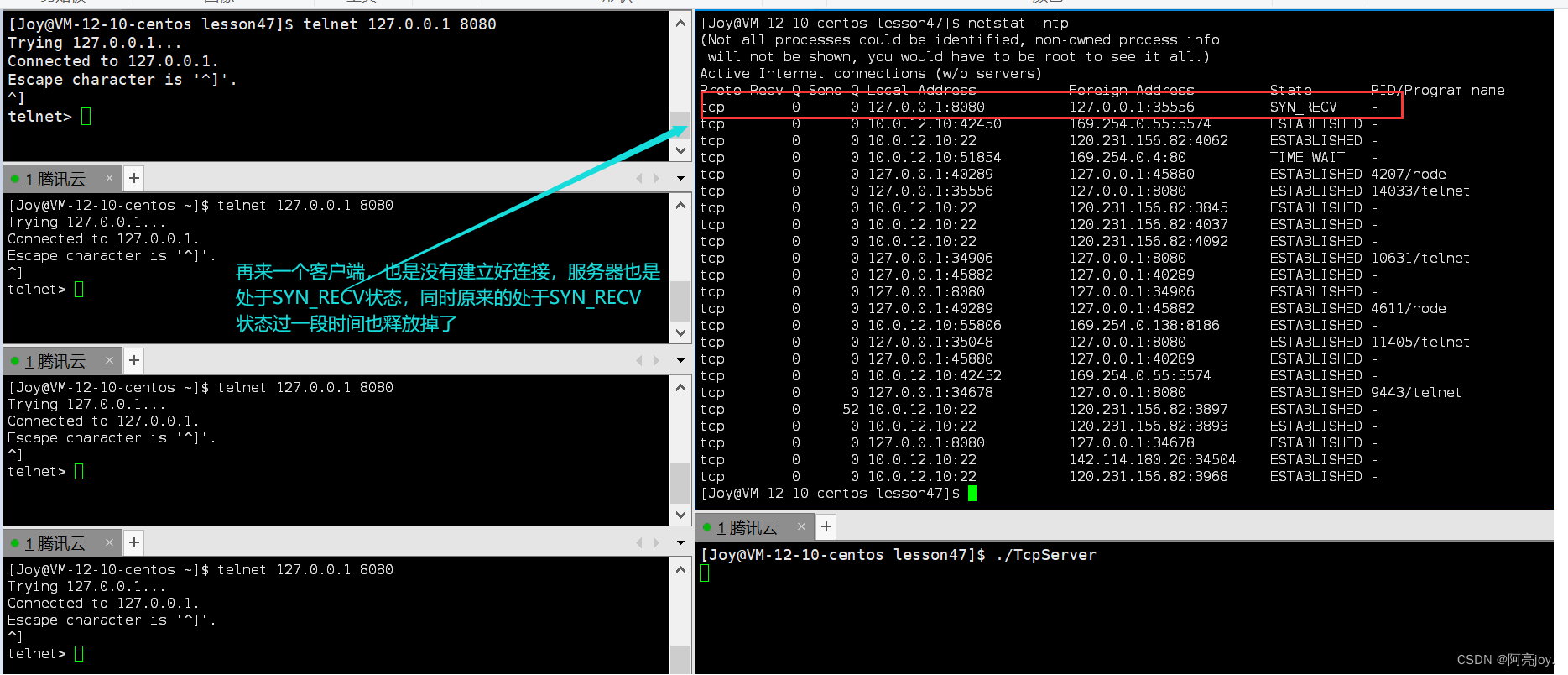
【Linux】TCP协议
🌠 作者:阿亮joy. 🎆专栏:《学会Linux》 🎇 座右铭:每个优秀的人都有一段沉默的时光,那段时光是付出了很多努力却得不到结果的日子,我们把它叫做扎根 目录 👉TCP协议&…
java设计模式-建造者(Builder)设计模式
介绍
Java的建造者(Builder)设计模式可以将产品的内部表现和产品的构建过程分离开来,这样使用同一个构建过程来构建不同内部表现的产品。
建造者设计模式涉及如下角色:
产品(Product)角色:被…
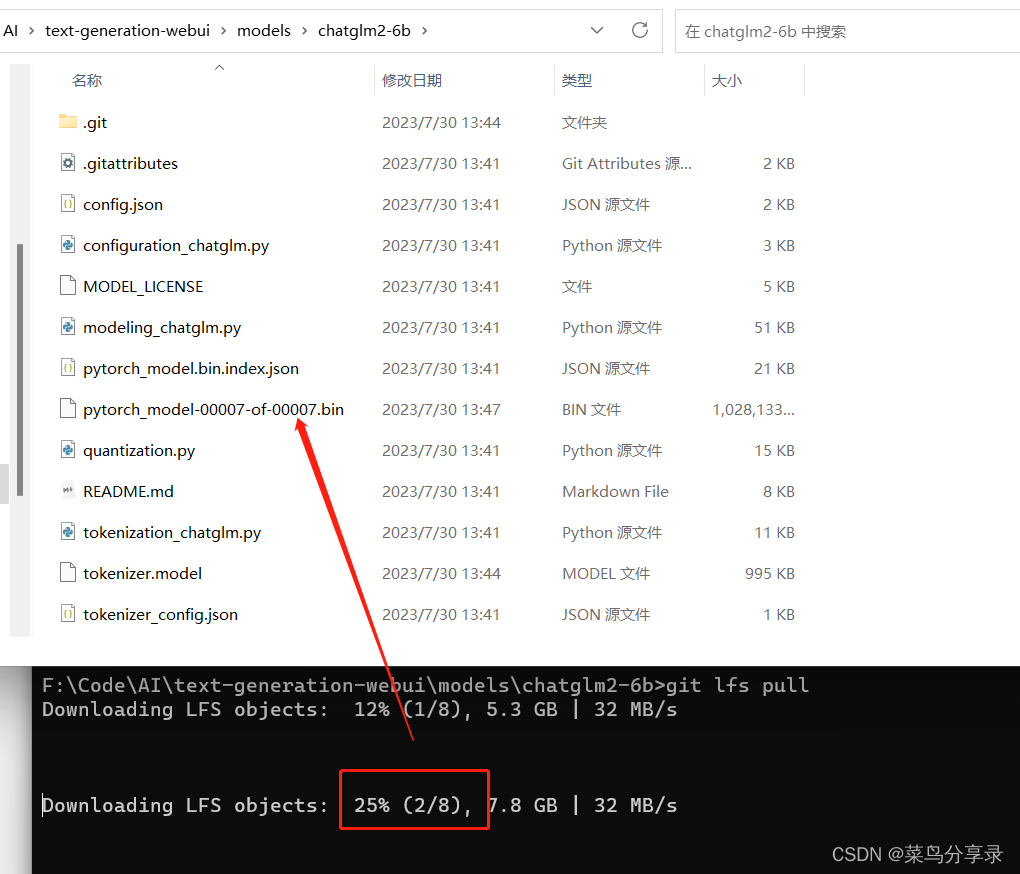
通过clone的方式,下载huggingface中的大模型(git lfs install)
1、如图:可以手动一个个文件下载,但是那样太慢了,此时,可以点击下图圈起来的地方。 2、点击【Clone repository】,在命令行中,输入【git lfs install】(安装了这个,才会下载大文件&a…
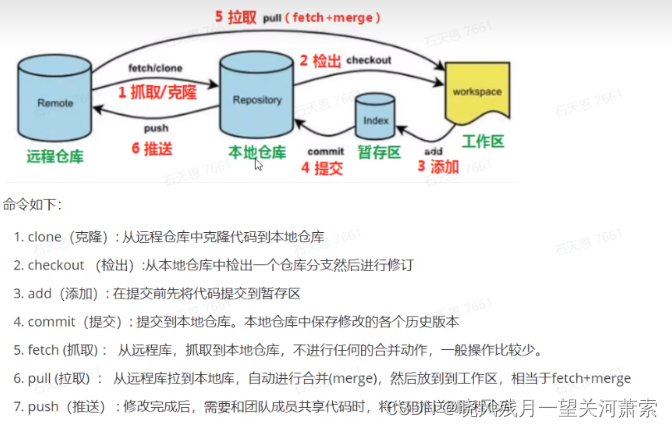
【Git】git企业开发命令整理,以及注意点
1.git企业开发过程 业务的分支大概有以下几个:
master:代码随时可能上线
develop:代码最新
feature/xxx:实际业务开发分支
release/xxx:预发布分支
fix:修复bug分支
过程大概是这样的:
首…