1、摄像头的内参和畸变矫正系数
这个系数不对,没法做,因为下一步没法做对。这个会导致系统无法初始化。
2、对畸变的像素点,求得归一化坐标的方法
理解不同矫正模型的原理,确保矫正对了,得到z=1平面的去畸变点。
3、摄像头和imu的外参
这个外参不对的话,起码在初始化的时候可以看到姿态是不对的,如有一个pitch角度翘起来之类的。可以在有个初始值的情况下,启动优化外参的开关,得到一个稳定的值。将这个稳定的值作为输入,或者在确认外参稳定后,才真正开始整个vins。
初始外参不太对,后面慢慢优化的效果:
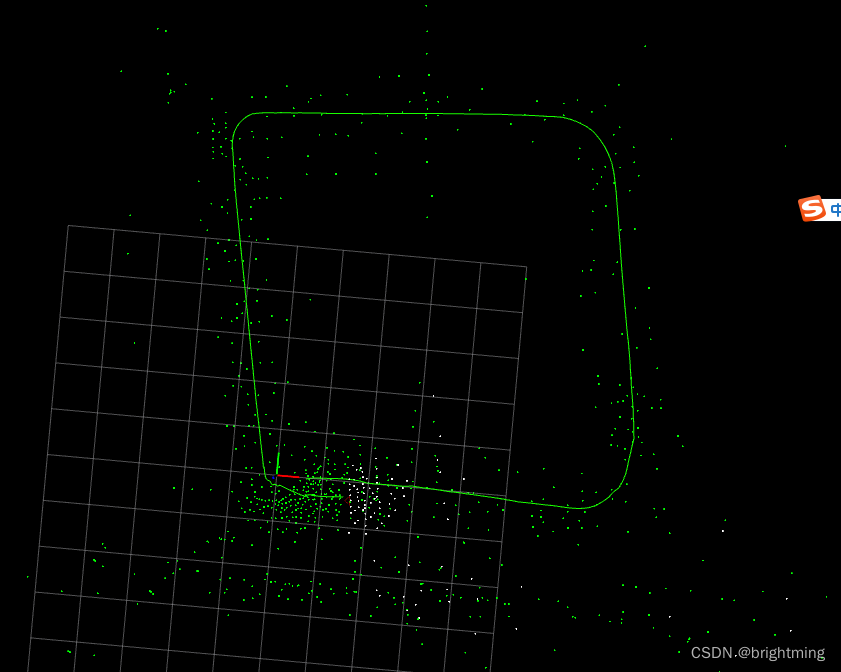
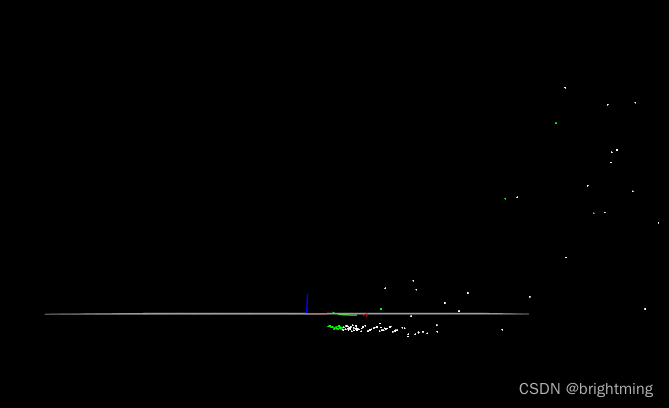
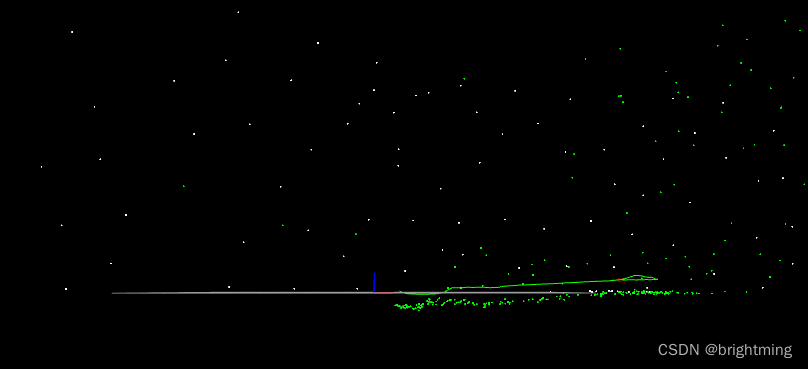
开始的时候pitch不为0,后面的轨迹就基本正常了。
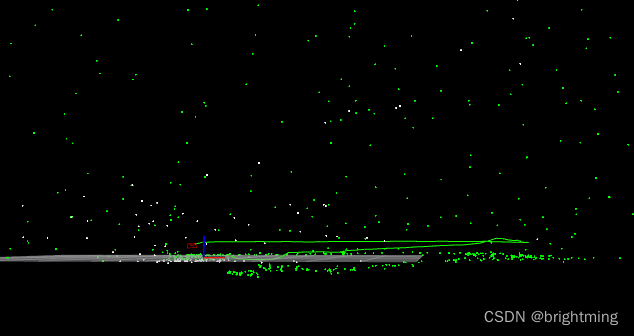
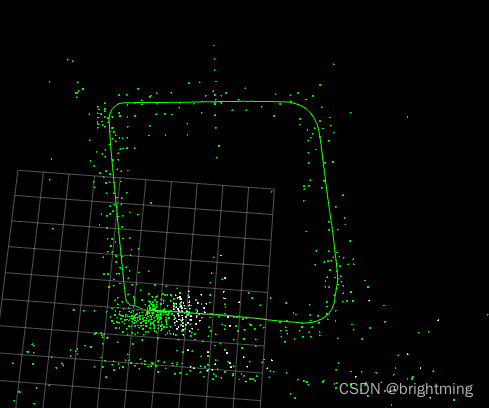
将优化得到的外参作为外参输入的效果:
俯视图:
侧视图: