文章目录
- 4 李群与李代数
- 4.1 李群与李代数基础
- 4.1.1 群
- 4.1.2 李代数的引出
- 4.1.3 李代数的定义
- 4.2 指数与对数映射
- 4.3 李代数求导与扰动模型
- 5 相机与图像
- 5.1 相机模型
- 5.1.1 针孔相机模型
- 5.1.2 畸变
- 5.1.3 双目相机
- 5.1.4 RGB-D相机
- 6 非线性优化
4 李群与李代数
为了解决什么样的相机位姿最符合当前观测数据的问题,可以构建出一个优化问题来求解最优的R和t。以达到误差最小。但是旋转矩阵自身是带有约束的(正交且行列式为1),这会引入额外的约束,导致优化变得困难。通过李群——李代数这种关系,希望把位姿估计的问题变为无约束的优化问题。
4.1 李群与李代数基础
4.1.1 群
群(Group)是一种集合加上一种运算的代数结构。把集合记作A,运算记作 ⋅ \cdot ⋅ ,那么群可以记作G = ( A , ⋅ )。群要求这个运算满足如下条件:
- 封闭性
- 结合律
- 幺元
- 逆
李群是指具有连续(光滑)性质的群。SO(3)和SE(3)都是李群。
4.1.2 李代数的引出
4.1.3 李代数的定义
每个李群都有与之对应的李代数,李代数描述了李群的局部性质。
李代数由一个集合V、一个数域F和一个二元运算[ , ](又称李括号)组成。如果它们满足以下几条性质,则称( V , F , [ , ] )为一个李代数,记作g。
- 封闭性
- 双线性
- 自反性(自己与自己的运算为零)
- 雅可比等价
4.2 指数与对数映射

4.3 李代数求导与扰动模型
引入李代数的一大动机就是方便求导优化。
5 相机与图像
5.1 相机模型
5.1.1 针孔相机模型
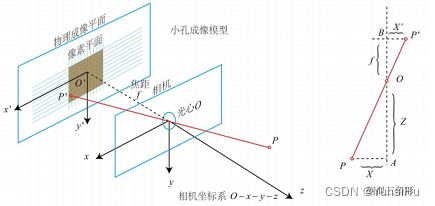
对内参、外参是怎么来的,做了推导。
5.1.2 畸变
畸变包含两种:径向畸变和切向畸变。
径向畸变:由透镜形状引起,主要包括桶形畸变和枕形畸变。可以看成坐标点沿着长度方向发生了变化,也就是其距离原点的长度发生了变化。
切向畸变:由透镜和成像平面不严格平行引起。可以看成坐标点沿着切线方向发生了变,也就是水平夹角发生了变化。
5.1.3 双目相机
基线:两个相机的光圈中心都位于x轴上,它们的距离称为双目相机的基线。
视差:左右图的横坐标之差。视差越大,距离越近。
5.1.4 RGB-D相机
按原理可以分为红外结构光型和飞行时间法(ToF)型。