指令调度(Instruction Scheduling)
- 指令调度的约束
- 基本机器模型
- 基本块调度
- 全局调度
指令调度是为了提高指令级并行(ILP),对于超长指令字(VLIW, Very Long Instruction Word)和多发射系统,ILP是可以有效提高硬件利用率。
指令调度的约束
指令调度也是一种程序的优化pass,需要遵循以下约束:
- 数据依赖约束。调度后代码执行结果需要和调度前相同。
- 控制依赖约束。所有调度前程序执行的指令都必须在调度后的程序中执行。
- 资源约束。调度不能超过机器上的资源。
数据依赖包括真依赖、反依赖、输出依赖和输入依赖,相关概念可以参阅 数据依赖和控制依赖 Data Dependence and Contol Dependence。前3种依赖约束了指令的执行顺序,但其中只有真依赖的依赖关系是不可解除的,而反依赖和输出依赖都可以通过使用不同的变量来解除依赖关系。
一个基本块(BB)内指令只要满足数据依赖就可以进行任意重新排序,但基本块内的程序通常都很少,重排提升并行性非常有限。提高基本块之间的并行性就至关重要了。基本块间指令的调度需要遵循控制依赖的约束,如果指令a的结果决定了指令b是否执行,则称指令b控制依赖于指令a。控制依赖相关概念可以参阅 数据依赖和控制依赖 Data Dependence and Contol Dependence。
资源约束是显而易见的,调度肯定不能超过机器物理资源的限制。
基本机器模型
在介绍指令调度前,先假设下我们的基本机器模型:
对于一个基本数学运算:
- 需要一个ALU单元的物理资源
- 需要一个时钟(clock)的时间
对于Loads (LD) 和 Stores (ST):
- 需要一个MEM(Memory buffer)单元的物理资源
- ST需要一个时钟时间。LD需要两个时钟时间才能完成,但是我们可以在下一个时钟ST到相同的内存位置,并且每个LD可以在任意时钟发射。
基本块调度
先从最简单的基本块调度说起,这里介绍列表调度(list scheduling)的方法。基本块内的指令顺序其实就是一种拓扑排序,基本块调度的目的是找到一种性能最佳(并行度最高)的拓扑排序。
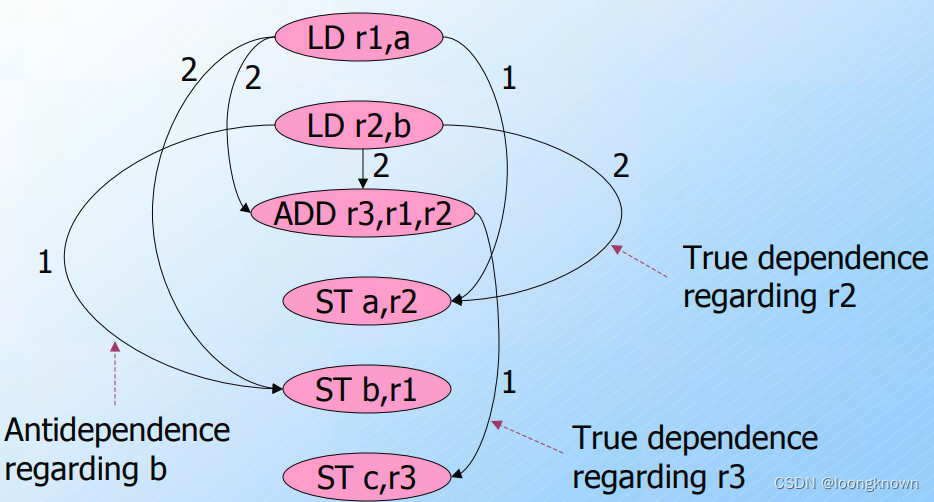
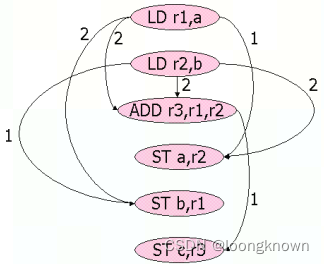
一个基本块内的指令构建一个数据依赖图(data-dependece graph):
- 节点就是基本块内的每条指令
- 边代表两条指令间的数据依赖, i → j i\rightarrow j i→j 表示指令 j j j 数据依赖于指令 i i i
- 边上有一个表示延迟的标号。代表目的指令必须在源指令发射后至少多少个时钟之后发射
例如:
LD r1, a // MEM
LD r2, b // MEM
ADD r3, r1, r2 // ALU
ST a r2 // MEM
ST b r1 // MEM
ST c r3 // MEM
数据依赖图为:
列表调度是一种简单的启发式的方法,在遵从数据依赖的基础上,选择一个带有优先级的拓扑排序来访问数据依赖图中的每个节点,比如启发式地先选择具有最长路径的节点。
指令选择的优先级:
- 最长路径(或关键路径)。从该节点开始的最长路径长度
- 满足资源限制
- 源指令的顺序
列表调度算法为:
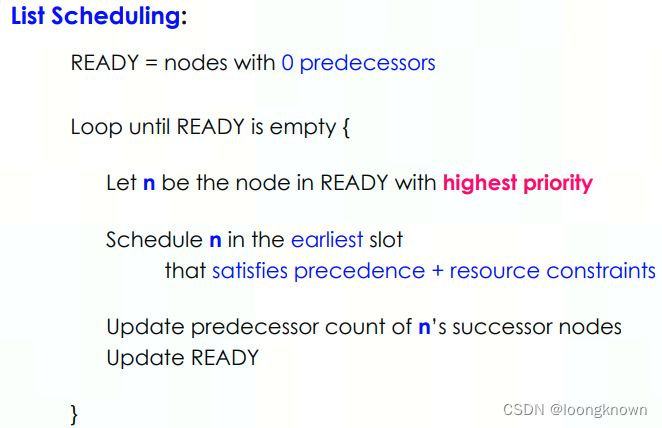
使用列表调度算法对上述指令调度如下:
1)首先将 LD r1, a 和 LD r2, b加入到READY中,此时 READY={LD r1, a; LD r1, a}。则先调度第一条指令 LD r1, a,此时MEM资源限制,LD r2, b延迟到第二个时钟调度:
LD r1, a // clock 1
LD r2, b // clock 2
此时更新READY为 READY={ADD r3, r1, r2; ST a r2; ST b r1 }。
2)接着ADD r3, r1, r2有最高优先权(最长执行路径),并且ALU资源可用,最早可以在第四个时钟调度:
LD r1, a // clock 1
LD r2, b // clock 2
ADD r3, r1, r2 // clock 4
此时更新READY为 READY={ST a r2; ST b r1; ST c r3 }。
3)接着ST a r2有最高调度优先权,最早在时钟4就绪,并且MEM资源可用,因而可以调度到时钟4的位置:
LD r1, a // clock 1
LD r2, b // clock 2
ADD r3, r1, r2 ST a r2 // clock 4
此时更新READY为 READY={ST b r1; ST c r3 }。
4)此时ST b r1有最高调度优先权,最早在时钟3就绪,并且MEM资源可用,因而可以调度到时钟3的位置:
LD r1, a // clock 1
LD r2, b // clock 2
ST b r1 // clock 3
ADD r3, r1, r2 ST a r2 // clock 4
此时更新READY为 READY={ST c r3 }。
5)最后调度ST c r3,结果如下:
LD r1, a // clock 1
LD r2, b // clock 2
ST b r1 // clock 3
ADD r3, r1, r2 ST a r2 // clock 4
ST c r3 // clock 5
全局调度
基本块可以调度的空间非常有限,因而跨基本块的全局调度至关重要。在介绍全局调度前,这里先介绍一个概念:控制等价的(control equivalent)。
如果基本块B支配基本块B’,并且基本块B’反向支配基本块,则称B和B‘是控制等价的。
假设每个时钟可以执行任意两条指令,除了加载指令需要两个时钟周期的延迟外,其余每条指令执行延迟为一个时钟周期。下面的例子,假设a、b、c、d和e地址各不相同,并且它们的地址分别存放在R1~R5中。

通过观察,有以下几个优化点:
- 不管分支如何跳转,
B3中的指令都会被执行,一次B3可以和B1并行执行。 B2和B1存在控制依赖关系,可以投机性地执行B2中的加载指令,如果B2被执行则可以节省两个时钟周期。但保存指令不能投机性地执行,它会覆盖某个内存位置上的值,却可以延迟执行一个保存指令。
移动后的代码可以在4个时钟周期内完成。
指令移动的目的是在遵从数据依赖的同时增加指令的并行性。包括向上代码移动和向下代码移动。
向上代码移动:将指令从基本块src向上移动到基本块dst:
- 如果
src和dst是控制等价的,如果这样的移动没有破坏数据依赖关系,并且可以让的代码运行的更快,这样的移动没有任何问题。 - 如果
src不反向支配dst,则意味着存在一条经过dst但不经过src的路径,在这条路径上会多执行一条被移动过去的指令。首先这条被移动的指令必须是没有副作用的,否则这样的移动就是非法移动。如果这条指令在dst中是”免费“执行的(利用的是闲置的物理资源),则这样的移动不会产生开销。当控制流达到src时,这次移动就是有收益的。 - 如果
dst不支配src,则存在一条不经过dst就到达src的路径,那我们需要在这条路径上插入被移动指令的拷贝(补偿代码)。补偿代码会让某些执行路径变慢,因此需要对这种移动的收益作出评估才行。
向下代码移动:将指令从基本块src向下移动到基本块dst。根据支配情况也同样有以上类似问题。
这里介绍一个基本的全局调度算法——区域调度,它优先调度最内层循环,并且仅向上移动代码。
程序可以被看作是一个 区域(Region) 的层次结构。区域是流图中只有单个入口节点的部分,正式地讲,一个区域是满足如下条件的节点N和边E的集合:
- N中有一个支配N中所有节点的头节点h。
- 如果某个节点m可以不经过h可以到达N中的n,那么m也在N中。
- E是N中任意两个节点n1和n2之间的控制流边的集合。有些进入h的边(可能)不在其中。
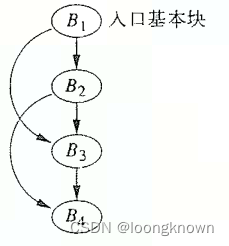
B1和B2以及边B1->B2形成一个区域。B1、B2和B3以及边B1->B2、B2->B3和B1->B3也形成一个区域。但是B2、B3以及边B2->B3组成的子图不是一个区域。
最后给出区域调度算法如下:

参考:
- https://suif.stanford.edu/~courses/cs243/lectures/L7.pdf
- http://infolab.stanford.edu/~ullman/dragon/w06/lectures/inst-sched.pdf
- 龙书