提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 前言
- 一:配置pycharm的ros开发环境
- 二:核心代码讲解
- 三 效果演示
- XTDrone
- 四 完整代码
前言
ubuntu 18.04
pycharm
ros melodic
做一个在终端中键盘输入指令,控制飞机起飞以及进入offbaord
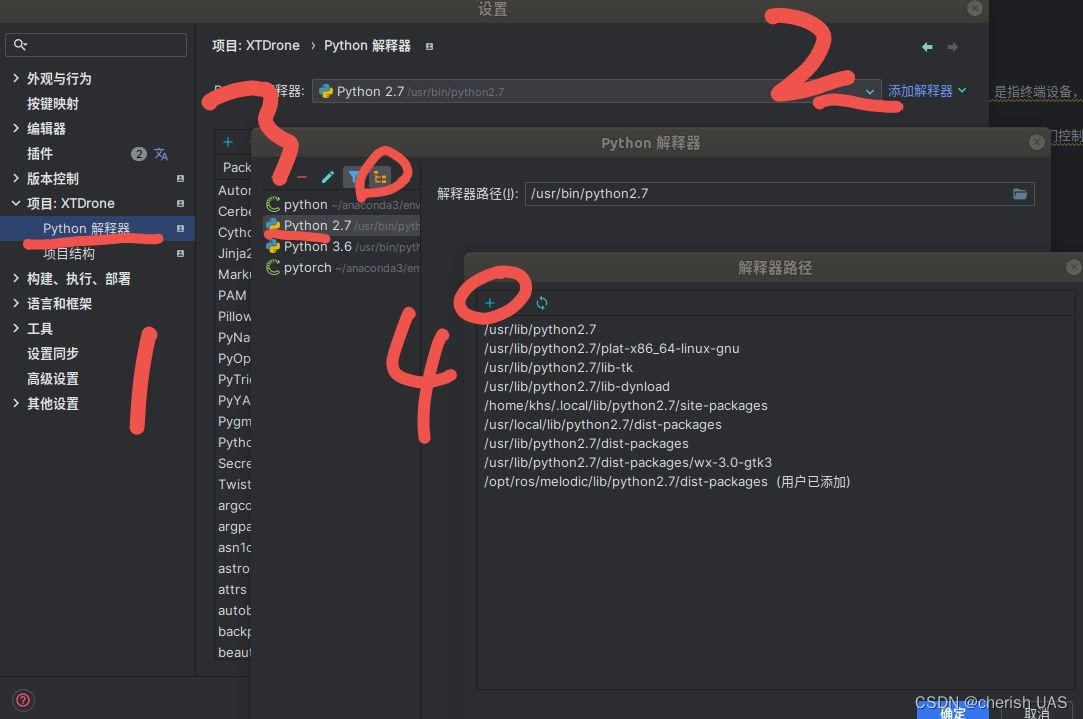
一:配置pycharm的ros开发环境
File->Settings->Project Interpreter->右边小齿轮Show All->选中正在使用的python
点击右边最下面的图标,打开Interpreter Path
添加/opt/ros/indigo/lib/python2.7/dist-packages
二:核心代码讲解
def getKey():
#这行代码使用tty模块的setraw()函数来设置标准输入(sys.stdin)的行为为原始模式。
#原始模式下,输入不经过缓冲,每次输入一个字符。
tty.setraw(sys.stdin.fileno())
#这行代码使用select模块的select()函数来检查是否有可读取的数据。
#它监视sys.stdin(标准输入),并且等待0.1秒钟。如果在等待期间有数据可读,
#则select()函数会返回一个非空的可读列表(rlist),否则返回空列表
rlist, _, _ = select.select([sys.stdin], [], [], 0.1)
#这段代码检查rlist列表是否非空。如果列表非空,说明在等待期间有数据可读。
#此时,通过sys.stdin.read(1)读取一个字符,并将其赋值给key变量。
#如果列表为空,则说明在等待期间没有数据可读,此时将key变量赋值为空字符串。
if rlist:
key = sys.stdin.read(1)
else:
key = ''
#这行代码使用termios模块的tcsetattr()函数来恢复标准输入的设置。
#TCSADRAIN参数表示在所有排队的输出都被传输和处理之后才生效。
#将标准输入的属性设置为之前保存的settings值。它使用termios.tcsetattr函数来设置终端的属性。
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
#最后,函数返回变量key的值,即读取到的字符(如果有)或空字符串(如果没有读取到字符)。
return key
三 效果演示
在不同的仿真环境中,话题名称可能不一致,需要改源码的话题名称
XTDrone
roslaunch px4 outdoor1.launch
python my_keyboard_control.py#键盘控制代码

四 完整代码
# coding=utf-8
import mavros_msgs
import rospy
from mavros_msgs.srv import SetMode,CommandBool
import sys, select, os
#os模块是用于与操作系统进行交互的模块。TTY(teletypewriter)是指终端设备,例如终端窗口、终端控制台或串口终端。
#select 模块:该模块提供了对低级 I/O 多路复用的支持。
#termios模块是Python中用于处理终端IO(Input/Output)的模块,允许我们控制终端的特性(attributes),例如字符的读取方式、输入输出模式等。
import tty, termios
from std_msgs.msg import String
cmd_vel_mask = False
msg2all = """
请输入输入指令:
r : return home
t/y : arm/disarm
v/n : takeoff/land
b : offboard
s/k : hover and remove the mask of keyboard control
CTRL-C to quit
"""
def getKey():
#这行代码使用tty模块的setraw()函数来设置标准输入(sys.stdin)的行为为原始模式。
#原始模式下,输入不经过缓冲,每次输入一个字符。
tty.setraw(sys.stdin.fileno())
#这行代码使用select模块的select()函数来检查是否有可读取的数据。
#它监视sys.stdin(标准输入),并且等待0.1秒钟。如果在等待期间有数据可读,
#则select()函数会返回一个非空的可读列表(rlist),否则返回空列表
rlist, _, _ = select.select([sys.stdin], [], [], 0.1)
#这段代码检查rlist列表是否非空。如果列表非空,说明在等待期间有数据可读。
#此时,通过sys.stdin.read(1)读取一个字符,并将其赋值给key变量。
#如果列表为空,则说明在等待期间没有数据可读,此时将key变量赋值为空字符串。
if rlist:
key = sys.stdin.read(1)
else:
key = ''
#这行代码使用termios模块的tcsetattr()函数来恢复标准输入的设置。
#TCSADRAIN参数表示在所有排队的输出都被传输和处理之后才生效。
#将标准输入的属性设置为之前保存的settings值。它使用termios.tcsetattr函数来设置终端的属性。
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
#最后,函数返回变量key的值,即读取到的字符(如果有)或空字符串(如果没有读取到字符)。
return key
def print_msg():
print(msg2all)
#主函数
if __name__=="__main__":
#设置终端为标准输入流
settings = termios.tcgetattr(sys.stdin)
rospy.init_node('my_keyboard_control')
multi_cmd_ser = rospy.ServiceProxy("/iris_0/mavros/set_mode",SetMode)
multi_arm_ser=rospy.ServiceProxy("/iris_0/mavros/cmd/arming",mavros_msgs.srv.CommandBool)
print_msg()
cmd=""
while(1):
key = getKey()#获取读取到的字符
if key == 'r':
cmd = 'AUTO.RTL'
print_msg()
print('Returning home')
elif key == 't':
cmd = 'ARM'
print_msg()
print('Arming')
elif key == 'y':
cmd = 'DISARM'
print_msg()
print('Disarming')
elif key == 'v':
cmd = 'AUTO.TAKEOFF'
print_msg()
#print('Takeoff mode is disenabled now')
elif key == 'b':
cmd = 'OFFBOARD'
print_msg()
print('Offboard')
elif key == 'n':
cmd = 'AUTO.LAND'
print_msg()
print('Landing')
elif key in ['k', 's']:
cmd = 'HOVER'
print_msg()
print('Hover')
elif(key == '\x03'):
break
if (cmd=='ARM'):
multi_arm_ser(True)
elif (cmd=='DISARM'):
multi_arm_ser(False)
else:
multi_cmd_ser(custom_mode=cmd)
cmd = ''
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)