芯片使用:MSP432P401R.
今日学习一款全角度15KG大扭力舵机的驱动,最近电赛学习任务紧,更新一篇比较水的文章:
文章提供原理解释,全部代码,整体工程:
目录
舵机驱动原理:
这是舵机DS3115MG:
全角度反馈编程设计:
初始化定时器TA3:
设计转角函数:
整体测试工程下载:
测试成功视频:
提示:这个代码对MG996R舵机同样适用
舵机驱动原理:
目前我所接触到的舵机,9g舵机,以及本文将要介绍的DS3115MG,它们作为舵机,一般接有三根线,其中俩根是供电使用,还有一根是信号线,供电需要我们对照产品手册选择合适的电源,而信号线则是重点学习的地方:
之前我有一篇文章讲过9g舵机的驱动:
MSP432学习笔记8:定时器A_PWM驱动舵机_NULL指向我的博客-CSDN博客
而我们今日学习的主角:DS3115MG,它的驱动原理与之大同小异,我们需要给信号线一个相应频率PWM的信号,让其知道有控制信号要到来,然后同时调整PWM的占空比即可调整其旋转角度
(这里信号的频率与占空比先不仔细说,后文会一起查阅介绍,手把手编程驱动)
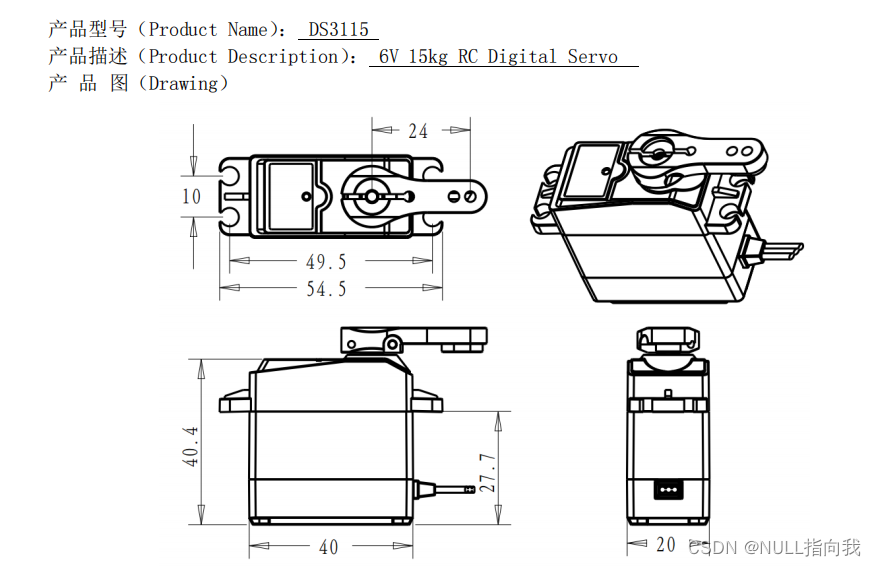
这是舵机DS3115MG:

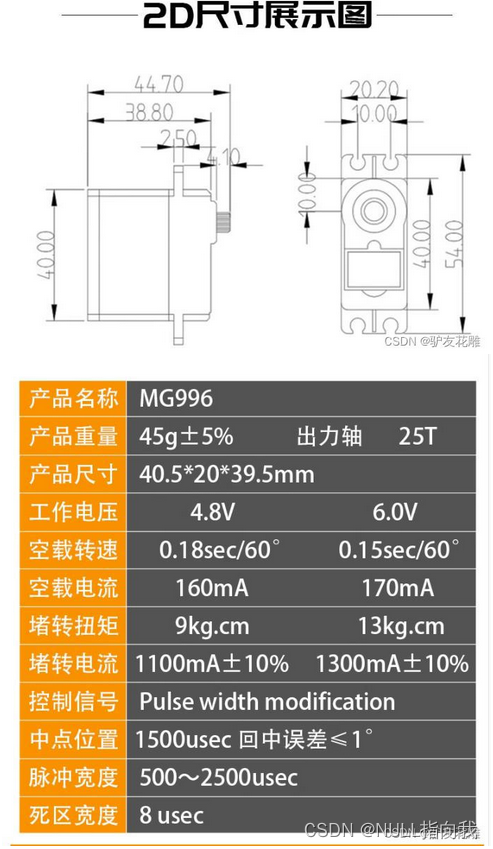
我们看到它的手册,挖掘有用信息:
我们需要知道的大致有三个重要点:1、电压电流 2、PWM频率 3、识别占空比范围
第一张图告诉我们,这个产品是有15KG的扭力的,而且预计可能要最大6V的供电:
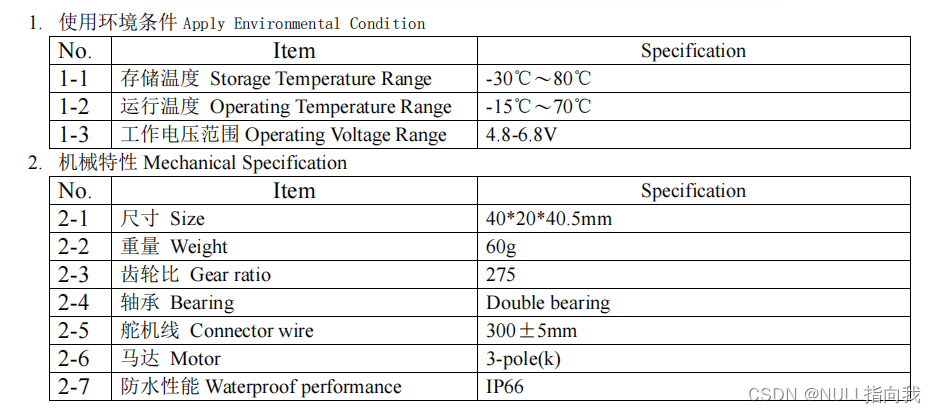
第二张图介绍基本机械特性与性能,使用机械电子产品应在合理的环境条件下
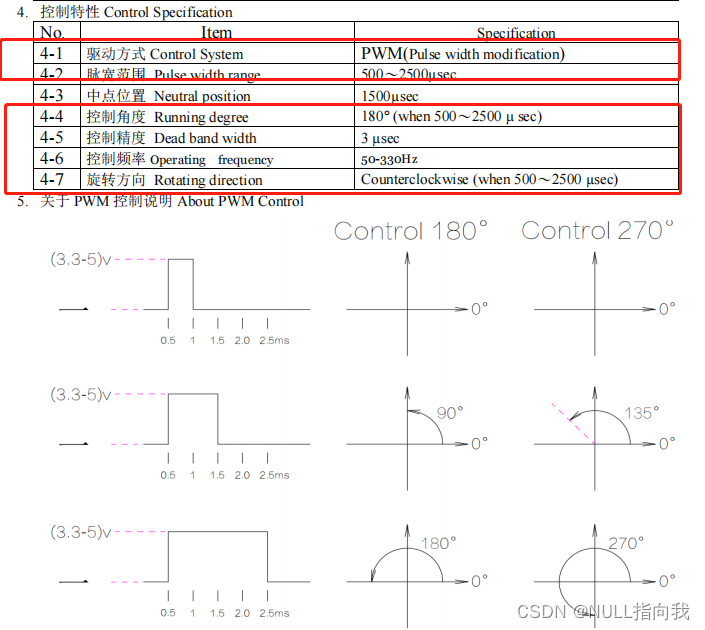
这张图便是有我们需要的参数:
1.PWM频率范围50~330Hz
2.脉宽范围是500~2500 us
3.精度是3us
4.旋转方向是顺时针
全角度反馈编程设计:
实验目标:
0.初始化定时器A的PWM模式
1.舵机缓慢从0~180全角度转动
2.反馈当前高电平占空比
首先我们有输出PWM的需求,因此这时少不了MSP432的定时器A,他作为瑞士军刀级别的多功能定时器模块,它有PWM输出的功能
初始化定时器TA3:
//定时器A3 PWM 初始化
void TimerA3_PWM_inint(void)
{
//1.配置GPIO复用
GPIO_setAsPeripheralModuleFunctionOutputPin(GPIO_PORT_P9,GPIO_PIN2,GPIO_PRIMARY_MODULE_FUNCTION);
//2.配置结构体
Timer_A_PWMConfig TimA3_PWMConfig; //定义一个名为 TimA1_PWMConfig的结构体
TimA3_PWMConfig.clockSource=TIMER_A_CLOCKSOURCE_SMCLK; //时钟源
TimA3_PWMConfig.clockSourceDivider=48; //时钟分频 范围1~64
TimA3_PWMConfig.timerPeriod=3333; //自动重载值
TimA3_PWMConfig.compareRegister=TIMER_A_CAPTURECOMPARE_REGISTER_3;//通道一(与引脚相关联)
TimA3_PWMConfig.compareOutputMode=TIMER_A_OUTPUTMODE_TOGGLE_SET; //输出模式
TimA3_PWMConfig.dutyCycle=1; //此处可初始调占空比
//初始化定时器:
Timer_A_generatePWM(TIMER_A3_BASE,&TimA3_PWMConfig);
}
这段代码分为几个步骤来初始化定时器TA3:
1.配置GPIO复用
2.配置初始化结构体:
我此处的时钟源SMCLK是配置的48Mhz,48分频,
TimA3_PWMConfig.timerPeriod=3333; 是自动重载值,是根据需要频率计算的:
计算公式如下:
PWM频率 = 时钟源频率 / ((时钟源除数值“时钟分频”) *(CCR0值“自动重载值” + 1))
此处我需要的是300HZ的信号,因此我的计算过程如下:
300=48 000 000/(48*(CCR0+1))
计算出CCR0约为3333
设计转角函数:
因为这个项目仅仅只需让这个舵机转就行了,所以这部分做的比较粗糙,使用了延时函数以及扔进主循环的诸多粗糙做法:
大致思路是定义好其最大与最小占空比,在定义其每次转角占空比增加的最小分度 ,让i从500~2500之间每次加三在变化,同时向上位机打印当前角度的i值:
#include "main.h"
#define DIV 3
#define DIV_MAX 2500
#define DIV_MIN 500
uint16_t i=0;
int main(void)
{
inint_all(); //初始化所有模块
while (1)
{
if(i<DIV_MIN)
{i=DIV_MIN;}
i+=DIV;
printf("%d\r\n",i);
delay_ms(50);
MAP_Timer_A_setCompareValue(TIMER_A3_BASE,TIMER_A_CAPTURECOMPARE_REGISTER_3,i);
if(i>=DIV_MAX)
{i=DIV_MIN;}
}
}整体测试工程下载:
https://download.csdn.net/download/qq_64257614/88111224?spm=1001.2014.3001.5503
测试成功视频:
·
DS3115舵机的0~180全角度驱动
提示:这个代码对MG996R舵机同样适用