本文章学习研究PID闭环回路控制算法,介绍帮助大家理解这个算法,希望看后觉得有用就三连支持一下。
目录
认识PID:
PID算法知识理论学习:
首先看PID原理的框图:
一、比例算法P:
二、积分算法I:
三、微分算法D:
认识PID:
PID算法的应用领域:
PID算法主要运用在自动控制系统中,常见的领域包括工业控制、机器人控制、航空航天、汽车控制、水处理、温度控制、流量控制等。
PID算法可以根据系统的反馈信号来实时调整控制参数,使系统的输出能够快速稳定地达到预期值。通过PID算法的应用,可以提高系统的稳定性、精度和响应速度,从而实现自动控制。
PID算法的输入一般就俩个:是当前反馈传感器的值与用户设定值,然后根据俩者的误差,直接计算出其期望功率,从而加快或减少电机转速.
PID算法知识理论学习:
首先看PID原理的框图:
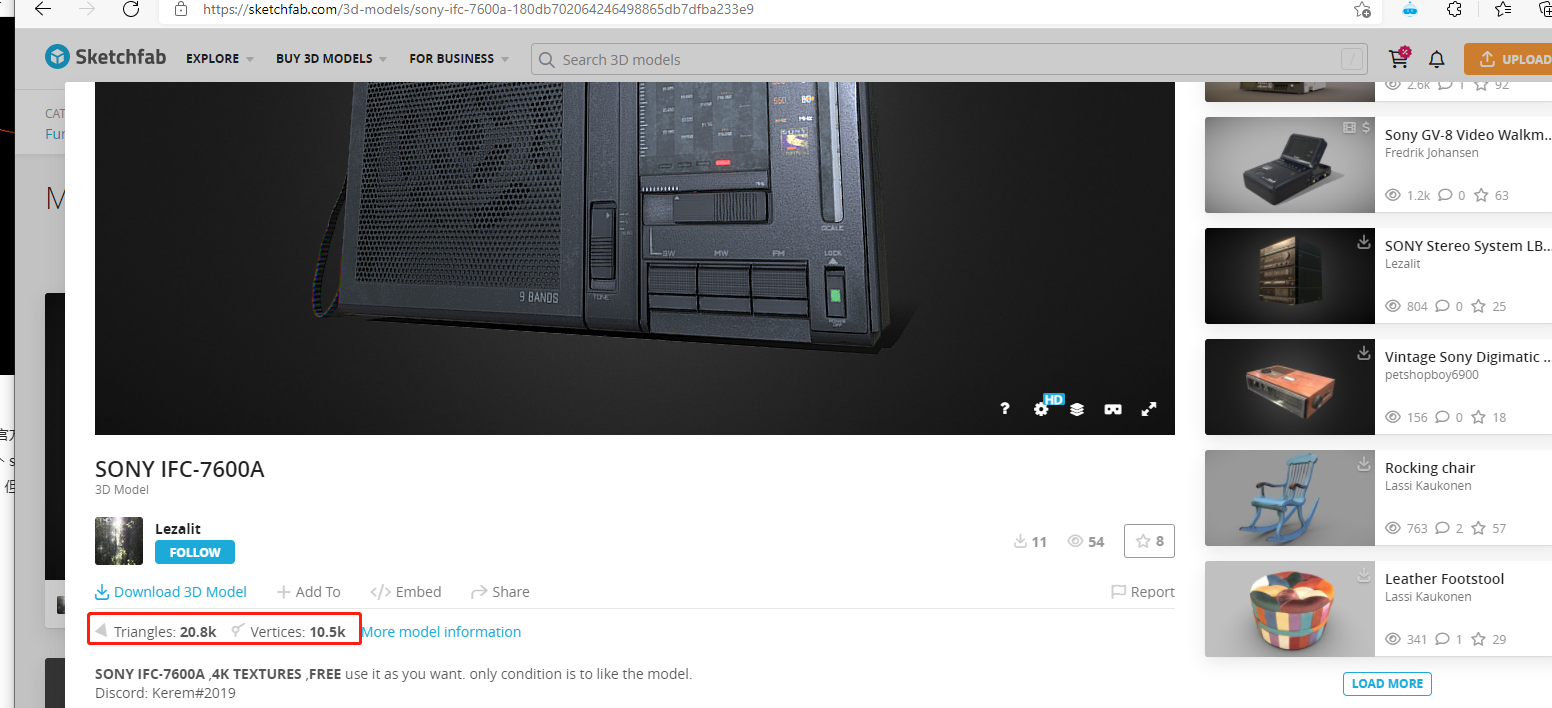
 从这个图中我们了解到,整个计算过程其实是对于“误差”,来进行一系列计算的,输入也只要有设定值Sv与反馈值Pv,它的输出计算是根据历史、当前、趋势来进行计算的,参照传感器数据达标与否,用户设定值与其误差为多少,来进行输出上的自动调整,整个流程从而形成回路
从这个图中我们了解到,整个计算过程其实是对于“误差”,来进行一系列计算的,输入也只要有设定值Sv与反馈值Pv,它的输出计算是根据历史、当前、趋势来进行计算的,参照传感器数据达标与否,用户设定值与其误差为多少,来进行输出上的自动调整,整个流程从而形成回路
现在我们通过传感器采样从开机以来所有采样点的数据序列(理论上时间间隔越短越好)
X1、X2、... 、Xn-1、Xn ,然后从这三方面挖掘PID的三个算法原理:
以下是网上找的图,可以对照看看:
其中R(t)是设定,U(t)是输出,C(t)是传感器反馈
一、比例算法P:
公式:Pout=Kp*Ek 其中( Ek=Sv-Xk )
Ek是误差的意思,Sv是用户设定值,Xk是传感器传回的数据,Kp是一个比例,是需要根据实际情况进行调整的。
原理:
这个算法是直接根据误差来进行比例上的计算,将误差乘以比例,直接输出,误差有三种情况:
Ek>0:当前未达标、Ek=0:正好达标、Ek<0:当前超标。根据这三种情况,比例性地放大、缩小偏差值。
系统上会控制输出更快速得接近目标值
单独使用的缺点:
因为Pout=Kp*Ek ,所以 Ek=0:正好达标时,输出也为0,有误差才起左右,没误差就不动了。
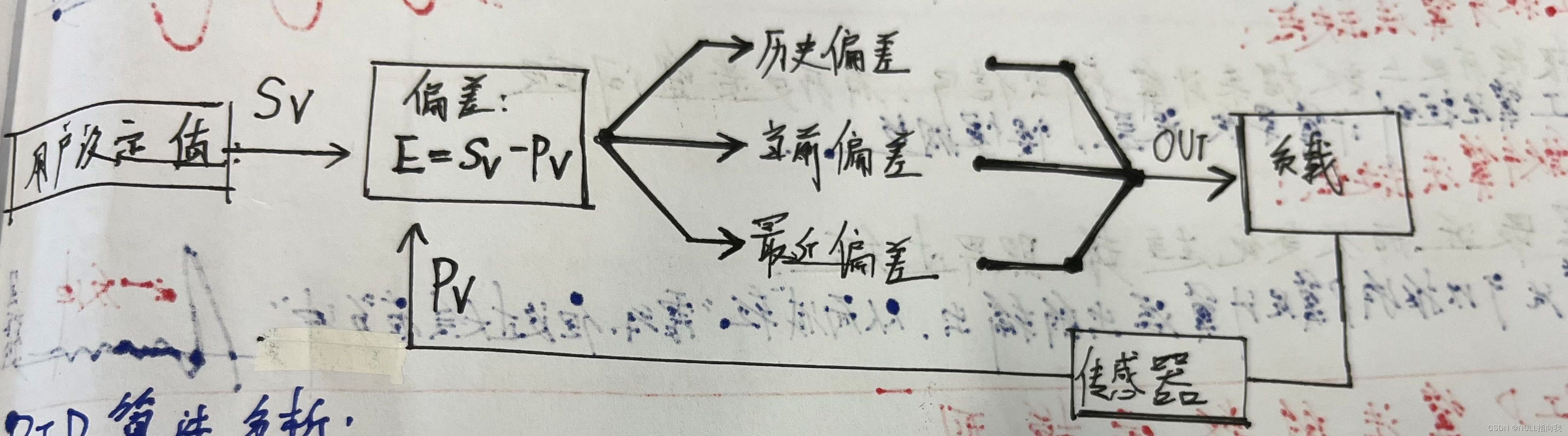
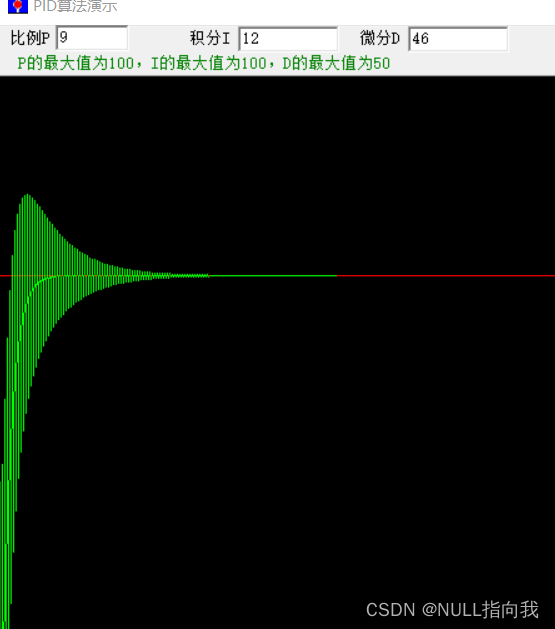
系统上体现单独使用容易产生震荡:
下图为震荡的演示:
比例过大导致起初有许多超调,这个图的演示其实不太准确,但大致表现出单独的比例算法对于物理惯性的稳定方面有所劣势:
二、积分算法I:
公式:Iout=Ki*Sk 其中( Sk=E1+E2+...+Ek-1+Ek )
Sk是指开机以来的偏差的相加的值,Ki是积分的比例,是需要根据实际情况进行调整的。
原理:
这个算法累加过去的误差,根据历史值来计算输出。过去总体未达标:给增强信号,过去整体超标:给减弱信号,累计误差有三种情况:
Sk>0:过去整体不达标, Sk=0:过去整体达标, Sk<0:过去整体超标
系统上会累计减小误差
单独使用的缺点:
Sk=0,就会无输出
过多的累计历史误差,会有历史遗留问题,有些历史误差是不需要过多被累计的
三、微分算法D:
公式:Dout=Kd*Dk 其中( Dk=Ek-Ek-1 )
Dk是指最近俩次偏差值的相减,预示着一种趋势
原理:
微分考虑最近的俩次偏差值,获取一种趋势;
Dk>0:上升趋势,Dk=0:不变趋势,Dk<0:下降趋势

系统上,D算法可以抵消P算法单独使用带来的计算溢出,但调整不当会有反冲现象:
下图为反冲的演示:
D算法占比过大,大致演示反冲,图不准确,但大致是这意思~
单独使用的缺点:
这个没法单独使用
调整PID有关思路: