一、坐标旋转
坐标旋转包含绕x、y、z轴旋转,在右手坐标系中,x-翻滚(roll),y-俯仰(pitch),z-航向(yaw)。如果想详细了解,可以网络搜索
在PCL中,从baseLink到map的转换关系为:先绕x轴旋转,在绕y轴旋转,最后绕z轴旋转,即左乘为Rzyx, 然后在平移t. 从map到baseLink的转换关系正好相反,先平移-t, 然后绕z轴旋转,在绕y轴,最后绕x轴. 注意,此时旋转的角度与baseLink到map的正好相反.
当前车体的位置即姿态x, y, z, roll, pitch, yaw。通过pcl::getTransformation获取从车体坐标系到大地坐标系的旋转矩阵。
Eigen::Matrix3f getRomateZYXMat(float yaw, float pitch, float roll){
float cz = cos(yaw);
float sz = sin(yaw);
float cx = cos(roll);
float sx = sin(roll);
float cy = cos(pitch);
float sy = sin(pitch);
Eigen::Matrix3f Rx, Ry, Rz, mat;
Rx << 1, 0, 0,
0, cx, -sx,
0, sx, cx;
Ry << cy, 0, sy,
0, 1, 0,
-sy, 0, cy;
Rz << cz, -sz, 0,
sz, cz, 0,
0 , 0, 1;
mat = Rx * Ry * Rz;
return mat;
}
在三维点云中,
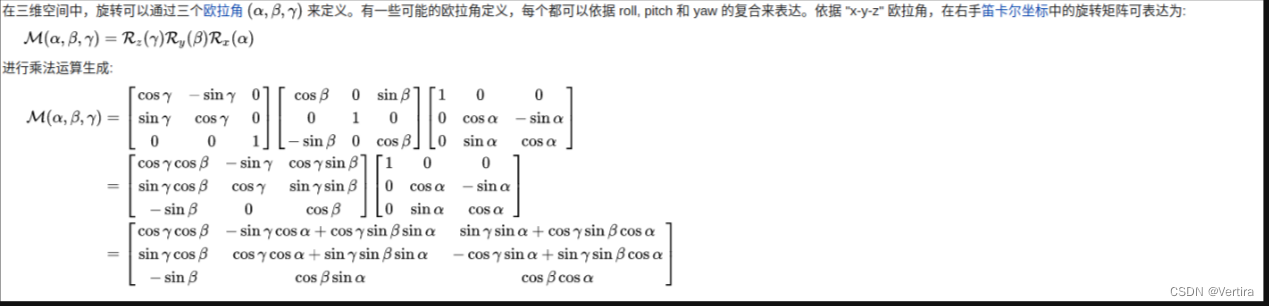
这个旋转公式可以,有效的解释其选择公式代码
如下
cx = cos(x(1));
cy = cos(x(2));
cz = cos(x(3));
sx = sin(x(1));
sy = sin(x(2));
sz = sin(x(3));
R1 = [cy*cz, sx*sy*cz-cx*sz, cx*sy*cz+sx*sz;
cy*sz, cx*cz+sx*sy*sz, cx*sy*sz-sx*cz;
-sy, sx*cy, cx*cy];代码理解完毕