mmdet3d预处理(下)—— train pipeline

文章目录
- mmdet3d预处理(下)—— train pipeline
- 基类 BaseTransform
- LoadPointsFromFile
- LoadAnnotations3D
- 标签信息:
- 源码
- ObjectSample
- 源码
- ObjectNoise
- 输入参数
- 源码
- RandomFlip3D
- 参数
- 源码
- GlobalRotScaleTrans
- 参数
- 源码
- PointsRangeFilter
- 源码
- ObjectRangeFilter
- 源码
- ObjectNameFilter
- 源码
- PointShuffle
- 源码
- Pack3DDetInputs
- 源码
- Reference
- >>>>> 欢迎关注公众号【三戒纪元】 <<<<<
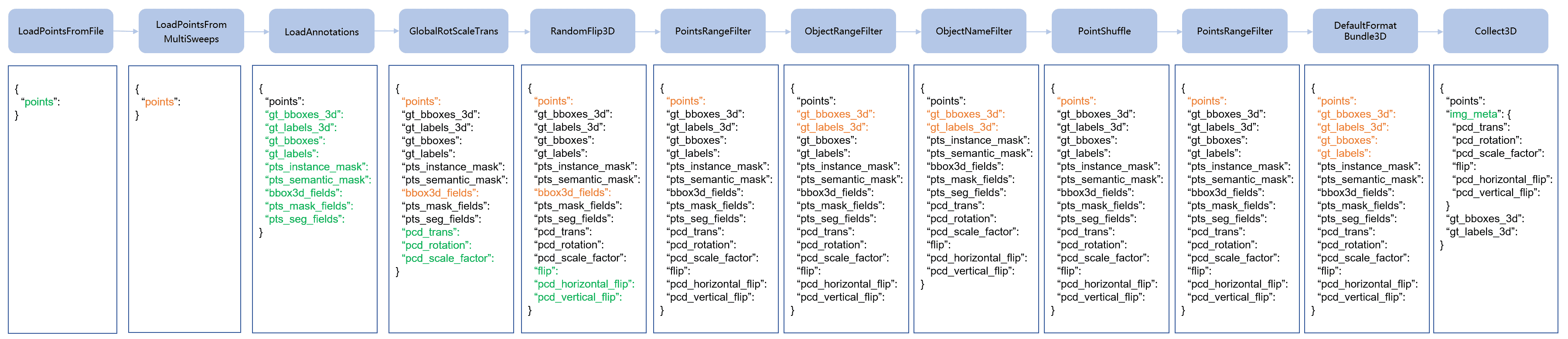
本篇着重分析训练pipeline中各函数的作用及源码剖析
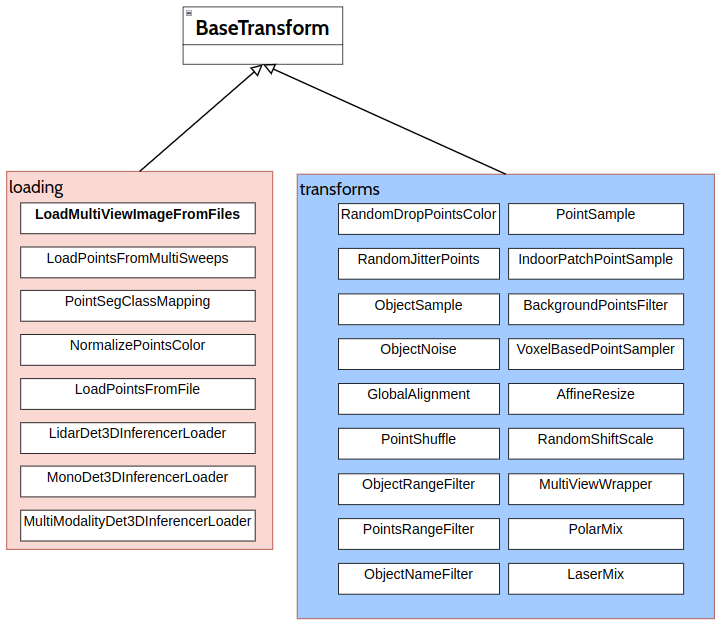
基类 BaseTransform
MMDet3D 1.1中的数据转换都继承自MMCV>=2.0.0 r0中的BaseTransform
- 一些数据转换的功能(例如,“Resize”)被分解成几个转换,以简化和澄清用法。
- 根据数据集的新数据结构,每次数据转换处理的数据字典格式都会发生变化。将一些低效的数据转换(如归一化normalization和填充padding)移到模型的数据预处理中,以改进数据加载和训练速度
LoadPointsFromFile
mmdet3d/datasets/transforms/loading.py
从点云文件加载点
@TRANSFORMS.register_module()
class LoadPointsFromFile(BaseTransform):
"""Load Points From File.
Required Keys:
- lidar_points (dict)
- lidar_path (str)
Added Keys:
- points (np.float32)
Args:
coord_type (str): The type of coordinates of points cloud.
Available options includes:
- 'LIDAR': Points in LiDAR coordinates.
- 'DEPTH': Points in depth coordinates, usually for indoor dataset.
- 'CAMERA': Points in camera coordinates.
load_dim (int): The dimension of the loaded points. Defaults to 6.
use_dim (list[int] | int): Which dimensions of the points to use.
Defaults to [0, 1, 2]. For KITTI dataset, set use_dim=4
or use_dim=[0, 1, 2, 3] to use the intensity dimension.
shift_height (bool): Whether to use shifted height. Defaults to False.
use_color (bool): Whether to use color features. Defaults to False.
norm_intensity (bool): Whether to normlize the intensity. Defaults to
False.
backend_args (dict, optional): Arguments to instantiate the
corresponding backend. Defaults to None.
"""
def __init__(self,
coord_type: str,
load_dim: int = 6,
use_dim: Union[int, List[int]] = [0, 1, 2],
shift_height: bool = False,
use_color: bool = False,
norm_intensity: bool = False,
backend_args: Optional[dict] = None) -> None:
self.shift_height = shift_height
self.use_color = use_color
if isinstance(use_dim, int):
use_dim = list(range(use_dim))
assert max(use_dim) < load_dim, \
f'Expect all used dimensions < {load_dim}, got {use_dim}'
assert coord_type in ['CAMERA', 'LIDAR', 'DEPTH']
self.coord_type = coord_type
self.load_dim = load_dim
self.use_dim = use_dim
self.norm_intensity = norm_intensity
self.backend_args = backend_args
def _load_points(self, pts_filename: str) -> np.ndarray:
"""Private function to load point clouds data.
Args:
pts_filename (str): Filename of point clouds data.
Returns:
np.ndarray: An array containing point clouds data.
"""
try:
pts_bytes = get(pts_filename, backend_args=self.backend_args)
points = np.frombuffer(pts_bytes, dtype=np.float32)
except ConnectionError:
mmengine.check_file_exist(pts_filename)
if pts_filename.endswith('.npy'):
points = np.load(pts_filename)
else:
points = np.fromfile(pts_filename, dtype=np.float32)
return points
def transform(self, results: dict) -> dict:
"""Method to load points data from file.
Args:
results (dict): Result dict containing point clouds data.
Returns:
dict: The result dict containing the point clouds data.
Added key and value are described below.
- points (:obj:`BasePoints`): Point clouds data.
"""
pts_file_path = results['lidar_points']['lidar_path']
points = self._load_points(pts_file_path)
points = points.reshape(-1, self.load_dim)
points = points[:, self.use_dim]
if self.norm_intensity:
assert len(self.use_dim) >= 4, \
f'When using intensity norm, expect used dimensions >= 4, got {len(self.use_dim)}' # noqa: E501
points[:, 3] = np.tanh(points[:, 3])
attribute_dims = None
if self.shift_height:
floor_height = np.percentile(points[:, 2], 0.99)
height = points[:, 2] - floor_height
points = np.concatenate(
[points[:, :3],
np.expand_dims(height, 1), points[:, 3:]], 1)
attribute_dims = dict(height=3)
if self.use_color:
assert len(self.use_dim) >= 6
if attribute_dims is None:
attribute_dims = dict()
attribute_dims.update(
dict(color=[
points.shape[1] - 3,
points.shape[1] - 2,
points.shape[1] - 1,
]))
points_class = get_points_type(self.coord_type)
points = points_class(
points, points_dim=points.shape[-1], attribute_dims=attribute_dims)
results['points'] = points
return results
_load_points:从文件中加载点云,转换为numpy格式
transform:
- 首先正常从文件加载点云
- 根据是否对强度值规范化 ,对强度值进行处理(tanh)
- 是否偏移高度,是否将点云高度减去地面高度
- 是否使用颜色
- 返回带点云数据的字典
LoadAnnotations3D
加载点的实例掩码和语义掩码,并将条目封装到相关字段中。
说白点就是加载GT框的相关信息。
标签信息:
| key | description |
|---|---|
gt_bboxes_3d (:obj:LiDARInstance3DBoxes |:obj:DepthInstance3DBoxes | :obj:CameraInstance3DBoxes) | gt 3d 包围盒。 仅当“with_bbox_3d”为 True 时 |
| gt_labels_3d (np.int64) | gt 3d 标签。仅当“with_label_3d”为 True 时。 |
| gt_bboxes (np.float32) | gt bboxes 包围盒。仅当“with_bbox”为 True 时。 |
| gt_labels (np.ndarray) | gt 标签。仅当“with_label”为 True 时。 |
| depths (np.ndarray) | 深度。仅当with_bbox_depth 为 True。 |
| center_2d (np.ndarray) | 2d中心。仅当with_bbox_depth 为 True。 |
| attr_labels (np.ndarray) | 实例的属性标签。仅当“with_attr_label”为 True 时。 |
源码
@TRANSFORMS.register_module()
class LoadAnnotations3D(LoadAnnotations):
"""Load Annotations3D.
Load instance mask and semantic mask of points and
encapsulate the items into related fields.
def _load_bboxes_3d(self, results: dict) -> dict:
"""Private function to move the 3D bounding box annotation from
`ann_info` field to the root of `results`.
Args:
results (dict): Result dict from :obj:`mmdet3d.CustomDataset`.
Returns:
dict: The dict containing loaded 3D bounding box annotations.
"""
results['gt_bboxes_3d'] = results['ann_info']['gt_bboxes_3d']
return results
def _load_bboxes_depth(self, results: dict) -> dict:
"""Private function to load 2.5D bounding box annotations.
Args:
results (dict): Result dict from :obj:`mmdet3d.CustomDataset`.
Returns:
dict: The dict containing loaded 2.5D bounding box annotations.
"""
results['depths'] = results['ann_info']['depths']
results['centers_2d'] = results['ann_info']['centers_2d']
return results
def _load_labels_3d(self, results: dict) -> dict:
"""Private function to load label annotations.
Args:
results (dict): Result dict from :obj:`mmdet3d.CustomDataset`.
Returns:
dict: The dict containing loaded label annotations.
"""
results['gt_labels_3d'] = results['ann_info']['gt_labels_3d']
return results
def _load_attr_labels(self, results: dict) -> dict:
"""Private function to load label annotations.
Args:
results (dict): Result dict from :obj:`mmdet3d.CustomDataset`.
Returns:
dict: The dict containing loaded label annotations.
"""
results['attr_labels'] = results['ann_info']['attr_labels']
return results
def _load_masks_3d(self, results: dict) -> dict:
"""Private function to load 3D mask annotations.
Args:
results (dict): Result dict from :obj:`mmdet3d.CustomDataset`.
Returns:
dict: The dict containing loaded 3D mask annotations.
"""
pts_instance_mask_path = results['pts_instance_mask_path']
try:
mask_bytes = get(
pts_instance_mask_path, backend_args=self.backend_args)
pts_instance_mask = np.frombuffer(mask_bytes, dtype=np.int64)
except ConnectionError:
mmengine.check_file_exist(pts_instance_mask_path)
pts_instance_mask = np.fromfile(
pts_instance_mask_path, dtype=np.int64)
results['pts_instance_mask'] = pts_instance_mask
# 'eval_ann_info' will be passed to evaluator
if 'eval_ann_info' in results:
results['eval_ann_info']['pts_instance_mask'] = pts_instance_mask
return results
def _load_semantic_seg_3d(self, results: dict) -> dict:
"""Private function to load 3D semantic segmentation annotations.
Args:
results (dict): Result dict from :obj:`mmdet3d.CustomDataset`.
Returns:
dict: The dict containing the semantic segmentation annotations.
"""
pts_semantic_mask_path = results['pts_semantic_mask_path']
try:
mask_bytes = get(
pts_semantic_mask_path, backend_args=self.backend_args)
# add .copy() to fix read-only bug
pts_semantic_mask = np.frombuffer(
mask_bytes, dtype=self.seg_3d_dtype).copy()
except ConnectionError:
mmengine.check_file_exist(pts_semantic_mask_path)
pts_semantic_mask = np.fromfile(
pts_semantic_mask_path, dtype=np.int64)
if self.dataset_type == 'semantickitti':
pts_semantic_mask = pts_semantic_mask.astype(np.int64)
pts_semantic_mask = pts_semantic_mask % self.seg_offset
# nuScenes loads semantic and panoptic labels from different files.
results['pts_semantic_mask'] = pts_semantic_mask
# 'eval_ann_info' will be passed to evaluator
if 'eval_ann_info' in results:
results['eval_ann_info']['pts_semantic_mask'] = pts_semantic_mask
return results
def _load_panoptic_3d(self, results: dict) -> dict:
"""Private function to load 3D panoptic segmentation annotations.
Args:
results (dict): Result dict from :obj:`mmdet3d.CustomDataset`.
Returns:
dict: The dict containing the panoptic segmentation annotations.
"""
pts_panoptic_mask_path = results['pts_panoptic_mask_path']
try:
mask_bytes = get(
pts_panoptic_mask_path, backend_args=self.backend_args)
# add .copy() to fix read-only bug
pts_panoptic_mask = np.frombuffer(
mask_bytes, dtype=self.seg_3d_dtype).copy()
except ConnectionError:
mmengine.check_file_exist(pts_panoptic_mask_path)
pts_panoptic_mask = np.fromfile(
pts_panoptic_mask_path, dtype=np.int64)
if self.dataset_type == 'semantickitti':
pts_semantic_mask = pts_panoptic_mask.astype(np.int64)
pts_semantic_mask = pts_semantic_mask % self.seg_offset
elif self.dataset_type == 'nuscenes':
pts_semantic_mask = pts_semantic_mask // self.seg_offset
results['pts_semantic_mask'] = pts_semantic_mask
# We can directly take panoptic labels as instance ids.
pts_instance_mask = pts_panoptic_mask.astype(np.int64)
results['pts_instance_mask'] = pts_instance_mask
# 'eval_ann_info' will be passed to evaluator
if 'eval_ann_info' in results:
results['eval_ann_info']['pts_semantic_mask'] = pts_semantic_mask
results['eval_ann_info']['pts_instance_mask'] = pts_instance_mask
return results
def _load_bboxes(self, results: dict) -> None:
"""Private function to load bounding box annotations.
The only difference is it remove the proceess for
`ignore_flag`
Args:
results (dict): Result dict from :obj:`mmcv.BaseDataset`.
Returns:
dict: The dict contains loaded bounding box annotations.
"""
results['gt_bboxes'] = results['ann_info']['gt_bboxes']
def _load_labels(self, results: dict) -> None:
"""Private function to load label annotations.
Args:
results (dict): Result dict from :obj :obj:`mmcv.BaseDataset`.
Returns:
dict: The dict contains loaded label annotations.
"""
results['gt_bboxes_labels'] = results['ann_info']['gt_bboxes_labels']
def transform(self, results: dict) -> dict:
"""Function to load multiple types annotations.
Args:
results (dict): Result dict from :obj:`mmdet3d.CustomDataset`.
Returns:
dict: The dict containing loaded 3D bounding box, label, mask and
semantic segmentation annotations.
"""
results = super().transform(results)
if self.with_bbox_3d:
results = self._load_bboxes_3d(results)
if self.with_bbox_depth:
results = self._load_bboxes_depth(results)
if self.with_label_3d:
results = self._load_labels_3d(results)
if self.with_attr_label:
results = self._load_attr_labels(results)
if self.with_panoptic_3d:
results = self._load_panoptic_3d(results)
if self.with_mask_3d:
results = self._load_masks_3d(results)
if self.with_seg_3d:
results = self._load_semantic_seg_3d(results)
return results
ObjectSample
数据增强。
create data步骤建立了一个关于数据集的gt object 库,即db_infos.pkl ,ObjectSample 在当前样本较少的情况下,从库里采样一些 gt object 填充到当前样本中。
mmdet3d/datasets/transforms/transforms_3d.py
源码
@TRANSFORMS.register_module()
class ObjectSample(BaseTransform):
"""Sample GT objects to the data.
Required Keys:
- points
- ann_info
- gt_bboxes_3d
- gt_labels_3d
- img (optional)
- gt_bboxes (optional)
Modified Keys:
- points
- gt_bboxes_3d
- gt_labels_3d
- img (optional)
- gt_bboxes (optional)
Added Keys:
- plane (optional)
Args:
db_sampler (dict): Config dict of the database sampler.
sample_2d (bool): Whether to also paste 2D image patch to the images.
This should be true when applying multi-modality cut-and-paste.
Defaults to False.
use_ground_plane (bool): Whether to use ground plane to adjust the
3D labels. Defaults to False.
"""
def __init__(self,
db_sampler: dict,
sample_2d: bool = False,
use_ground_plane: bool = False) -> None:
self.sampler_cfg = db_sampler
self.sample_2d = sample_2d
if 'type' not in db_sampler.keys():
db_sampler['type'] = 'DataBaseSampler'
self.db_sampler = TRANSFORMS.build(db_sampler)
self.use_ground_plane = use_ground_plane
self.disabled = False
@staticmethod
def remove_points_in_boxes(points: BasePoints,
boxes: np.ndarray) -> np.ndarray:
"""Remove the points in the sampled bounding boxes.
Args:
points (:obj:`BasePoints`): Input point cloud array.
boxes (np.ndarray): Sampled ground truth boxes.
Returns:
np.ndarray: Points with those in the boxes removed.
"""
masks = box_np_ops.points_in_rbbox(points.coord.numpy(), boxes)
points = points[np.logical_not(masks.any(-1))]
return points
def transform(self, input_dict: dict) -> dict:
"""Transform function to sample ground truth objects to the data.
Args:
input_dict (dict): Result dict from loading pipeline.
Returns:
dict: Results after object sampling augmentation,
'points', 'gt_bboxes_3d', 'gt_labels_3d' keys are updated
in the result dict.
"""
if self.disabled:
return input_dict
gt_bboxes_3d = input_dict['gt_bboxes_3d']
gt_labels_3d = input_dict['gt_labels_3d']
if self.use_ground_plane:
ground_plane = input_dict.get('plane', None)
assert ground_plane is not None, '`use_ground_plane` is True ' \
'but find plane is None'
else:
ground_plane = None
# change to float for blending operation
points = input_dict['points']
if self.sample_2d:
img = input_dict['img']
gt_bboxes_2d = input_dict['gt_bboxes']
# Assume for now 3D & 2D bboxes are the same
sampled_dict = self.db_sampler.sample_all(
gt_bboxes_3d.numpy(),
gt_labels_3d,
gt_bboxes_2d=gt_bboxes_2d,
img=img)
else:
sampled_dict = self.db_sampler.sample_all(
gt_bboxes_3d.numpy(),
gt_labels_3d,
img=None,
ground_plane=ground_plane)
if sampled_dict is not None:
sampled_gt_bboxes_3d = sampled_dict['gt_bboxes_3d']
sampled_points = sampled_dict['points']
sampled_gt_labels = sampled_dict['gt_labels_3d']
gt_labels_3d = np.concatenate([gt_labels_3d, sampled_gt_labels],
axis=0)
gt_bboxes_3d = gt_bboxes_3d.new_box(
np.concatenate([gt_bboxes_3d.numpy(), sampled_gt_bboxes_3d]))
points = self.remove_points_in_boxes(points, sampled_gt_bboxes_3d)
# check the points dimension
points = points.cat([sampled_points, points])
if self.sample_2d:
sampled_gt_bboxes_2d = sampled_dict['gt_bboxes_2d']
gt_bboxes_2d = np.concatenate(
[gt_bboxes_2d, sampled_gt_bboxes_2d]).astype(np.float32)
input_dict['gt_bboxes'] = gt_bboxes_2d
input_dict['img'] = sampled_dict['img']
input_dict['gt_bboxes_3d'] = gt_bboxes_3d
input_dict['gt_labels_3d'] = gt_labels_3d.astype(np.int64)
input_dict['points'] = points
return input_dict
使用db_sample 类进行操作
sample_all:对所有种类的bbox进行采样:
sample_class_v2:对特定种类的包围盒进行采样
- 初始化 db_sampler ,在 db_sampler 初始化里面按照 difficulty 和 min_points 过滤掉 一些 gt object.
- 是否选择 sample_2d,调用相应的 db_sampler.sample_all
- db_sampler.sample_all() 的过程
- 计算每个类别需要 sample 的个数: 要求个数 减去 目前 gt label 中该类别个数
- 如果该类别的 gt objects 已经足够多,即需要 sample 的个数 <= 0,则不做任何 sample 操作,返回的 sample 结果为 None
- 如果该类别的 gt objects 比较少,则从 db_info 里面对应的类别 sample 所需数量的 object ,也就是从其他文件去 sample 一些 object 出来填充到当前文件的 gt 数据。比如用000005.bin 的一些 object 点云 补充到 000003.bin 去,并补充相应的 gt boxes.
- 得到 sample 结果之后,判断是否和已有的 gt boxes and sample boxes 冲突 (注意这里是将某类别的 sample 结果和目前所有类别的已有 boxes 判断冲突),保留那些没有冲突的 sample 结果作为该类别的 sample 结果
- concat sample 结果和原本的 gt labels and bboxes, 替换 gt point cloud 里面落在 sample boxes 里的 point 为 sample points
ObjectNoise
为每个场景的GT objects 增加一些噪声
输入参数
translation_std: List[float] = [0.25, 0.25, 0.25], # 平移标准差
global_rot_range: List[float] = [0.0, 0.0], # 旋转范围
rot_range: List[float] = [-0.15707963267, 0.15707963267], # 旋转角度范围
num_try: int = 100 # 个数
源码
ObjectNoise 调用 noise_per_object_v3_ 对每个 gt object 进行旋转、平移等操作,生成新的 gt object
def noise_per_object_v3_(gt_boxes,
points=None,
valid_mask=None,
rotation_perturb=np.pi / 4,
center_noise_std=1.0,
global_random_rot_range=np.pi / 4,
num_try=100)
RandomFlip3D
随机左右或前后翻转点云或者 bbox
参数
| args | description |
|---|---|
| sync_2d (bool) | 是否根据2D应用翻转图片。 如果为 True,它将应用与 2D 图像相同的翻转。如果为False,则会决定是否随机独立翻转到 2D 图像。 默认为 True。 |
| Flip_ratio_bev_horizontal (float) | 翻转概率在水平方向。 默认为 0.0。 |
| Flip_ratio_bev_vertical (float) | 翻转概率在垂直方向。 默认为 0.0。 |
| Flip_box3d (bool) | 是否翻转边界框。 在大多数情况下,盒子应该被翻转。 在基于凸轮的 bev 检测中,此设置为 False,因为 2D 图像的翻转不会影响 3D盒子。 默认为 True。 |
源码
def random_flip_data_3d(self,
input_dict: dict,
direction: str = 'horizontal') -> None:
"""Flip 3D data randomly.
`random_flip_data_3d` should take these situations into consideration:
- 1. LIDAR-based 3d detection
- 2. LIDAR-based 3d segmentation
- 3. vision-only detection
- 4. multi-modality 3d detection.
Args:
input_dict (dict): Result dict from loading pipeline.
direction (str): Flip direction. Defaults to 'horizontal'.
Returns:
dict: Flipped results, 'points', 'bbox3d_fields' keys are
updated in the result dict.
"""
assert direction in ['horizontal', 'vertical']
if self.flip_box3d:
if 'gt_bboxes_3d' in input_dict:
if 'points' in input_dict:
input_dict['points'] = input_dict['gt_bboxes_3d'].flip(
direction, points=input_dict['points'])
else:
# vision-only detection
input_dict['gt_bboxes_3d'].flip(direction)
else:
input_dict['points'].flip(direction)
if 'centers_2d' in input_dict:
assert self.sync_2d is True and direction == 'horizontal', \
'Only support sync_2d=True and horizontal flip with images'
w = input_dict['img_shape'][1]
input_dict['centers_2d'][..., 0] = \
w - input_dict['centers_2d'][..., 0]
# need to modify the horizontal position of camera center
# along u-axis in the image (flip like centers2d)
# ['cam2img'][0][2] = c_u
# see more details and examples at
# https://github.com/open-mmlab/mmdetection3d/pull/744
input_dict['cam2img'][0][2] = w - input_dict['cam2img'][0][2]
def _flip_on_direction(self, results: dict) -> None:
"""Function to flip images, bounding boxes, semantic segmentation map
and keypoints.
Add the override feature that if 'flip' is already in results, use it
to do the augmentation.
"""
if 'flip' not in results:
cur_dir = self._choose_direction()
else:
# `flip_direction` works only when `flip` is True.
# For example, in `MultiScaleFlipAug3D`, `flip_direction` is
# 'horizontal' but `flip` is False.
if results['flip']:
assert 'flip_direction' in results, 'flip and flip_direction '
'must exist simultaneously'
cur_dir = results['flip_direction']
else:
cur_dir = None
if cur_dir is None:
results['flip'] = False
results['flip_direction'] = None
else:
results['flip'] = True
results['flip_direction'] = cur_dir
self._flip(results)
def transform(self, input_dict: dict) -> dict:
"""Call function to flip points, values in the ``bbox3d_fields`` and
also flip 2D image and its annotations.
Args:
input_dict (dict): Result dict from loading pipeline.
Returns:
dict: Flipped results, 'flip', 'flip_direction',
'pcd_horizontal_flip' and 'pcd_vertical_flip' keys are added
into result dict.
"""
# flip 2D image and its annotations
if 'img' in input_dict:
super(RandomFlip3D, self).transform(input_dict)
if self.sync_2d and 'img' in input_dict:
input_dict['pcd_horizontal_flip'] = input_dict['flip']
input_dict['pcd_vertical_flip'] = False
else:
if 'pcd_horizontal_flip' not in input_dict:
flip_horizontal = True if np.random.rand(
) < self.flip_ratio_bev_horizontal else False
input_dict['pcd_horizontal_flip'] = flip_horizontal
if 'pcd_vertical_flip' not in input_dict:
flip_vertical = True if np.random.rand(
) < self.flip_ratio_bev_vertical else False
input_dict['pcd_vertical_flip'] = flip_vertical
if 'transformation_3d_flow' not in input_dict:
input_dict['transformation_3d_flow'] = []
if input_dict['pcd_horizontal_flip']:
self.random_flip_data_3d(input_dict, 'horizontal')
input_dict['transformation_3d_flow'].extend(['HF'])
if input_dict['pcd_vertical_flip']:
self.random_flip_data_3d(input_dict, 'vertical')
input_dict['transformation_3d_flow'].extend(['VF'])
return input_dict
主要使用了flip 的方法进行取反颠倒操作
class LiDARPoints(BasePoints):
"""Points of instances in LIDAR coordinates.
# ...
def flip(self, bev_direction: str = 'horizontal') -> None:
"""Flip the points along given BEV direction.
Args:
bev_direction (str): Flip direction (horizontal or vertical).
Defaults to 'horizontal'.
"""
assert bev_direction in ('horizontal', 'vertical')
if bev_direction == 'horizontal':
self.tensor[:, 1] = -self.tensor[:, 1]
elif bev_direction == 'vertical':
self.tensor[:, 0] = -self.tensor[:, 0]
GlobalRotScaleTrans
数据增广的一种方式,对输入点云进行随机旋转和放缩变换
将全局旋转、缩放和平移应用于 3D 场景
参数
| args | description |
|---|---|
| rot_range (list[float]) | 旋转角度范围。默认为 [-0.78539816, 0.78539816](接近 [-pi/4, pi/4])。 |
| scale_ratio_range (list[float]) | 比例范围。默认为 [0.95, 1.05]。 |
| Translation_std (list[float]) | 标准差应用于场景的平移噪声,其中从高斯分布中采样,其标准差由“translation_std”设置。 默认 |
| shift_height (bool) | 是否移动高度。(室内点的第四维)缩放时。默认为 False。 |
源码
def _trans_bbox_points(self, input_dict: dict) -> None:
"""Private function to translate bounding boxes and points.
Args:
input_dict (dict): Result dict from loading pipeline.
Returns:
dict: Results after translation, 'points', 'pcd_trans'
and `gt_bboxes_3d` is updated in the result dict.
"""
translation_std = np.array(self.translation_std, dtype=np.float32)
trans_factor = np.random.normal(scale=translation_std, size=3).T
input_dict['points'].translate(trans_factor)
input_dict['pcd_trans'] = trans_factor
if 'gt_bboxes_3d' in input_dict:
input_dict['gt_bboxes_3d'].translate(trans_factor)
def _rot_bbox_points(self, input_dict: dict) -> None:
"""Private function to rotate bounding boxes and points.
Args:
input_dict (dict): Result dict from loading pipeline.
Returns:
dict: Results after rotation, 'points', 'pcd_rotation'
and `gt_bboxes_3d` is updated in the result dict.
"""
rotation = self.rot_range
noise_rotation = np.random.uniform(rotation[0], rotation[1])
if 'gt_bboxes_3d' in input_dict and \
len(input_dict['gt_bboxes_3d'].tensor) != 0:
# rotate points with bboxes
points, rot_mat_T = input_dict['gt_bboxes_3d'].rotate(
noise_rotation, input_dict['points'])
input_dict['points'] = points
else:
# if no bbox in input_dict, only rotate points
rot_mat_T = input_dict['points'].rotate(noise_rotation)
input_dict['pcd_rotation'] = rot_mat_T
input_dict['pcd_rotation_angle'] = noise_rotation
def _scale_bbox_points(self, input_dict: dict) -> None:
"""Private function to scale bounding boxes and points.
Args:
input_dict (dict): Result dict from loading pipeline.
Returns:
dict: Results after scaling, 'points' and
`gt_bboxes_3d` is updated in the result dict.
"""
scale = input_dict['pcd_scale_factor']
points = input_dict['points']
points.scale(scale)
if self.shift_height:
assert 'height' in points.attribute_dims.keys(), \
'setting shift_height=True but points have no height attribute'
points.tensor[:, points.attribute_dims['height']] *= scale
input_dict['points'] = points
if 'gt_bboxes_3d' in input_dict and \
len(input_dict['gt_bboxes_3d'].tensor) != 0:
input_dict['gt_bboxes_3d'].scale(scale)
def _random_scale(self, input_dict: dict) -> None:
"""Private function to randomly set the scale factor.
Args:
input_dict (dict): Result dict from loading pipeline.
Returns:
dict: Results after scaling, 'pcd_scale_factor'
are updated in the result dict.
"""
scale_factor = np.random.uniform(self.scale_ratio_range[0],
self.scale_ratio_range[1])
input_dict['pcd_scale_factor'] = scale_factor
def transform(self, input_dict: dict) -> dict:
"""Private function to rotate, scale and translate bounding boxes and
points.
Args:
input_dict (dict): Result dict from loading pipeline.
Returns:
dict: Results after scaling, 'points', 'pcd_rotation',
'pcd_scale_factor', 'pcd_trans' and `gt_bboxes_3d` are updated
in the result dict.
"""
if 'transformation_3d_flow' not in input_dict:
input_dict['transformation_3d_flow'] = []
self._rot_bbox_points(input_dict)
if 'pcd_scale_factor' not in input_dict:
self._random_scale(input_dict)
self._scale_bbox_points(input_dict)
self._trans_bbox_points(input_dict)
input_dict['transformation_3d_flow'].extend(['R', 'S', 'T'])
return input_dict
PointsRangeFilter
通过设置点云范围,PointsRangeFilter用于过滤点云及其掩模(语义和实例)
源码
def transform(self, input_dict: dict) -> dict:
"""Transform function to filter points by the range.
Args:
input_dict (dict): Result dict from loading pipeline.
Returns:
dict: Results after filtering, 'points', 'pts_instance_mask'
and 'pts_semantic_mask' keys are updated in the result dict.
"""
points = input_dict['points']
points_mask = points.in_range_3d(self.pcd_range)
clean_points = points[points_mask]
input_dict['points'] = clean_points
points_mask = points_mask.numpy()
pts_instance_mask = input_dict.get('pts_instance_mask', None)
pts_semantic_mask = input_dict.get('pts_semantic_mask', None)
if pts_instance_mask is not None:
input_dict['pts_instance_mask'] = pts_instance_mask[points_mask]
if pts_semantic_mask is not None:
input_dict['pts_semantic_mask'] = pts_semantic_mask[points_mask]
return input_dict
通过获取范围内点云的mask,对点进行过滤。本质上还是通过范围比较进行
def in_range_3d(
self, box_range: Union[Tensor, np.ndarray,
Sequence[float]]) -> Tensor:
"""Check whether the boxes are in the given range.
Args:
box_range (Tensor or np.ndarray or Sequence[float]): The range of
box (x_min, y_min, z_min, x_max, y_max, z_max).
Note:
In the original implementation of SECOND, checking whether a box in
the range checks whether the points are in a convex polygon, we try
to reduce the burden for simpler cases.
Returns:
Tensor: A binary vector indicating whether each point is inside the
reference range.
"""
in_range_flags = ((self.tensor[:, 0] > box_range[0])
& (self.tensor[:, 1] > box_range[1])
& (self.tensor[:, 2] > box_range[2])
& (self.tensor[:, 0] < box_range[3])
& (self.tensor[:, 1] < box_range[4])
& (self.tensor[:, 2] < box_range[5]))
return in_range_flags
ObjectRangeFilter
ObjectRangeFilter用于过滤3D边界框。
源码
class ObjectRangeFilter(BaseTransform):
"""Filter objects by the range.
Required Keys:
- gt_bboxes_3d
Modified Keys:
- gt_bboxes_3d
Args:
point_cloud_range (list[float]): Point cloud range.
"""
def __init__(self, point_cloud_range: List[float]) -> None:
self.pcd_range = np.array(point_cloud_range, dtype=np.float32)
def transform(self, input_dict: dict) -> dict:
"""Transform function to filter objects by the range.
Args:
input_dict (dict): Result dict from loading pipeline.
Returns:
dict: Results after filtering, 'gt_bboxes_3d', 'gt_labels_3d'
keys are updated in the result dict.
"""
# Check points instance type and initialise bev_range
if isinstance(input_dict['gt_bboxes_3d'],
(LiDARInstance3DBoxes, DepthInstance3DBoxes)):
bev_range = self.pcd_range[[0, 1, 3, 4]]
elif isinstance(input_dict['gt_bboxes_3d'], CameraInstance3DBoxes):
bev_range = self.pcd_range[[0, 2, 3, 5]]
gt_bboxes_3d = input_dict['gt_bboxes_3d']
gt_labels_3d = input_dict['gt_labels_3d']
mask = gt_bboxes_3d.in_range_bev(bev_range)
gt_bboxes_3d = gt_bboxes_3d[mask]
# mask is a torch tensor but gt_labels_3d is still numpy array
# using mask to index gt_labels_3d will cause bug when
# len(gt_labels_3d) == 1, where mask=1 will be interpreted
# as gt_labels_3d[1] and cause out of index error
gt_labels_3d = gt_labels_3d[mask.numpy().astype(bool)]
# limit rad to [-pi, pi]
gt_bboxes_3d.limit_yaw(offset=0.5, period=2 * np.pi)
input_dict['gt_bboxes_3d'] = gt_bboxes_3d
input_dict['gt_labels_3d'] = gt_labels_3d
return input_dict
通过判断 gt_bboxes_3d是否在 bev的范围内对 box及label进行筛选
def in_range_bev(
self, box_range: Union[Tensor, np.ndarray,
Sequence[float]]) -> Tensor:
"""Check whether the boxes are in the given range.
Args:
box_range (Tensor or np.ndarray or Sequence[float]): The range of
box in order of (x_min, y_min, x_max, y_max).
Note:
The original implementation of SECOND checks whether boxes in a
range by checking whether the points are in a convex polygon, we
reduce the burden for simpler cases.
Returns:
Tensor: A binary vector indicating whether each box is inside the
reference range.
"""
in_range_flags = ((self.bev[:, 0] > box_range[0])
& (self.bev[:, 1] > box_range[1])
& (self.bev[:, 0] < box_range[2])
& (self.bev[:, 1] < box_range[3]))
return in_range_flags
ObjectNameFilter
通过名字对 GT objects 进行过滤。即通过输入为训练而保留的gt labels,对所有的输入的 gt 框进行过滤。
源码
@TRANSFORMS.register_module()
class ObjectNameFilter(BaseTransform):
"""Filter GT objects by their names.
Required Keys:
- gt_labels_3d
Modified Keys:
- gt_labels_3d
Args:
classes (list[str]): List of class names to be kept for training.
"""
def __init__(self, classes: List[str]) -> None:
self.classes = classes
self.labels = list(range(len(self.classes)))
def transform(self, input_dict: dict) -> dict:
"""Transform function to filter objects by their names.
Args:
input_dict (dict): Result dict from loading pipeline.
Returns:
dict: Results after filtering, 'gt_bboxes_3d', 'gt_labels_3d'
keys are updated in the result dict.
"""
gt_labels_3d = input_dict['gt_labels_3d']
# 此处为对labels 进行过滤,生成mask
gt_bboxes_mask = np.array([n in self.labels for n in gt_labels_3d],
dtype=bool)
input_dict['gt_bboxes_3d'] = input_dict['gt_bboxes_3d'][gt_bboxes_mask]
input_dict['gt_labels_3d'] = input_dict['gt_labels_3d'][gt_bboxes_mask]
return input_dict
PointShuffle
随机排列输入点
源码
@TRANSFORMS.register_module()
class PointShuffle(BaseTransform):
"""Shuffle input points."""
def transform(self, input_dict: dict) -> dict:
"""Call function to shuffle points.
Args:
input_dict (dict): Result dict from loading pipeline.
Returns:
dict: Results after filtering, 'points', 'pts_instance_mask'
and 'pts_semantic_mask' keys are updated in the result dict.
"""
idx = input_dict['points'].shuffle()
idx = idx.numpy()
pts_instance_mask = input_dict.get('pts_instance_mask', None)
pts_semantic_mask = input_dict.get('pts_semantic_mask', None)
if pts_instance_mask is not None:
input_dict['pts_instance_mask'] = pts_instance_mask[idx]
if pts_semantic_mask is not None:
input_dict['pts_semantic_mask'] = pts_semantic_mask[idx]
return input_dict
通过调用 shuffle 函数实现
def shuffle(self) -> Tensor:
"""Shuffle the points.
Returns:
Tensor: The shuffled index.
"""
idx = torch.randperm(self.__len__(), device=self.tensor.device)
self.tensor = self.tensor[idx]
return idx
Pack3DDetInputs
打包输入数据的方法。 当字典中的值是一个列表时,表示该值通常应用在增强测试中
在最新版本代码中,DefaultFormatBundle3D 和 Collect3D 替换为 PackDet3DInputs,将数据打包为元素格式作为模型输入。
源码
def transform(self, results: Union[dict,
List[dict]]) -> Union[dict, List[dict]]:
"""Method to pack the input data. when the value in this dict is a
list, it usually is in Augmentations Testing.
Args:
results (dict | list[dict]): Result dict from the data pipeline.
Returns:
dict | List[dict]:
- 'inputs' (dict): The forward data of models. It usually contains
following keys:
- points
- img
- 'data_samples' (:obj:`Det3DDataSample`): The annotation info of
the sample.
"""
# augtest
if isinstance(results, list):
if len(results) == 1:
# simple test
return self.pack_single_results(results[0])
pack_results = []
for single_result in results:
pack_results.append(self.pack_single_results(single_result))
return pack_results
# norm training and simple testing
elif isinstance(results, dict):
return self.pack_single_results(results)
else:
raise NotImplementedError
def pack_single_results(self, results: dict) -> dict:
"""Method to pack the single input data. when the value in this dict is
a list, it usually is in Augmentations Testing.
Args:
results (dict): Result dict from the data pipeline.
Returns:
dict: A dict contains
- 'inputs' (dict): The forward data of models. It usually contains
following keys:
- points
- img
- 'data_samples' (:obj:`Det3DDataSample`): The annotation info
of the sample.
"""
# Format 3D data
if 'points' in results:
if isinstance(results['points'], BasePoints):
results['points'] = results['points'].tensor
if 'img' in results:
if isinstance(results['img'], list):
# process multiple imgs in single frame
imgs = np.stack(results['img'], axis=0)
if imgs.flags.c_contiguous:
imgs = to_tensor(imgs).permute(0, 3, 1, 2).contiguous()
else:
imgs = to_tensor(
np.ascontiguousarray(imgs.transpose(0, 3, 1, 2)))
results['img'] = imgs
else:
img = results['img']
if len(img.shape) < 3:
img = np.expand_dims(img, -1)
# To improve the computational speed by by 3-5 times, apply:
# `torch.permute()` rather than `np.transpose()`.
# Refer to https://github.com/open-mmlab/mmdetection/pull/9533
# for more details
if img.flags.c_contiguous:
img = to_tensor(img).permute(2, 0, 1).contiguous()
else:
img = to_tensor(
np.ascontiguousarray(img.transpose(2, 0, 1)))
results['img'] = img
for key in [
'proposals', 'gt_bboxes', 'gt_bboxes_ignore', 'gt_labels',
'gt_bboxes_labels', 'attr_labels', 'pts_instance_mask',
'pts_semantic_mask', 'centers_2d', 'depths', 'gt_labels_3d'
]:
if key not in results:
continue
if isinstance(results[key], list):
results[key] = [to_tensor(res) for res in results[key]]
else:
results[key] = to_tensor(results[key])
if 'gt_bboxes_3d' in results:
if not isinstance(results['gt_bboxes_3d'], BaseInstance3DBoxes):
results['gt_bboxes_3d'] = to_tensor(results['gt_bboxes_3d'])
if 'gt_semantic_seg' in results:
results['gt_semantic_seg'] = to_tensor(
results['gt_semantic_seg'][None])
if 'gt_seg_map' in results:
results['gt_seg_map'] = results['gt_seg_map'][None, ...]
data_sample = Det3DDataSample()
gt_instances_3d = InstanceData()
gt_instances = InstanceData()
gt_pts_seg = PointData()
data_metas = {}
for key in self.meta_keys:
if key in results:
data_metas[key] = results[key]
elif 'images' in results:
if len(results['images'].keys()) == 1:
cam_type = list(results['images'].keys())[0]
# single-view image
if key in results['images'][cam_type]:
data_metas[key] = results['images'][cam_type][key]
else:
# multi-view image
img_metas = []
cam_types = list(results['images'].keys())
for cam_type in cam_types:
if key in results['images'][cam_type]:
img_metas.append(results['images'][cam_type][key])
if len(img_metas) > 0:
data_metas[key] = img_metas
elif 'lidar_points' in results:
if key in results['lidar_points']:
data_metas[key] = results['lidar_points'][key]
data_sample.set_metainfo(data_metas)
inputs = {}
for key in self.keys:
if key in results:
if key in self.INPUTS_KEYS:
inputs[key] = results[key]
elif key in self.INSTANCEDATA_3D_KEYS:
gt_instances_3d[self._remove_prefix(key)] = results[key]
elif key in self.INSTANCEDATA_2D_KEYS:
if key == 'gt_bboxes_labels':
gt_instances['labels'] = results[key]
else:
gt_instances[self._remove_prefix(key)] = results[key]
elif key in self.SEG_KEYS:
gt_pts_seg[self._remove_prefix(key)] = results[key]
else:
raise NotImplementedError(f'Please modified '
f'`Pack3DDetInputs` '
f'to put {key} to '
f'corresponding field')
data_sample.gt_instances_3d = gt_instances_3d
data_sample.gt_instances = gt_instances
data_sample.gt_pts_seg = gt_pts_seg
if 'eval_ann_info' in results:
data_sample.eval_ann_info = results['eval_ann_info']
else:
data_sample.eval_ann_info = None
packed_results = dict()
packed_results['data_samples'] = data_sample
packed_results['inputs'] = inputs
return packed_results
通过预先设定的keys 和 meta_keys ,整理结果数据,输出data pipeline 的字典结果
keys = [
'proposals', 'gt_bboxes', 'gt_bboxes_ignore', 'gt_labels',
'gt_bboxes_labels', 'attr_labels', 'pts_instance_mask',
'pts_semantic_mask', 'centers_2d', 'depths', 'gt_labels_3d'
]
meta_keys: tuple = ('img_path', 'ori_shape', 'img_shape', 'lidar2img',
'depth2img', 'cam2img', 'pad_shape',
'scale_factor', 'flip', 'pcd_horizontal_flip',
'pcd_vertical_flip', 'box_mode_3d', 'box_type_3d',
'img_norm_cfg', 'num_pts_feats', 'pcd_trans',
'sample_idx', 'pcd_scale_factor', 'pcd_rotation',
'pcd_rotation_angle', 'lidar_path',
'transformation_3d_flow', 'trans_mat',
'affine_aug', 'sweep_img_metas', 'ori_cam2img',
'cam2global', 'crop_offset', 'img_crop_offset',
'resize_img_shape', 'lidar2cam', 'ori_lidar2img',
'num_ref_frames', 'num_views', 'ego2global')
Reference
- [开源框架]mmdetection3d学习(三):数据加载