1、在fmu v2中回传电压值
在comm task 里面有电压读取的任务,pool 电池的电压状态
这是上层会调用hal层,也就是adc.c里面的read函数
主要是fmu v2 里面没有写adc的驱动函数,也就是driver层,这里需要模仿v5+上面的驱动来补充一下;
2、关于光流和激光定高模块的接入和处理
这两个模块目前主要还是在gd32的飞控上面
主要就是src下面的flow目录下面的源文件
光流模块通过串口连接飞控,发送的是光流的速度值和高度数据到飞控
主要的融合都放在fmt上面;
3、V5+无法连接地面站
注释掉配置里面的飞行前检查的宏
//#define FMT_USING_CHECKED
最后发现是sd的问题;
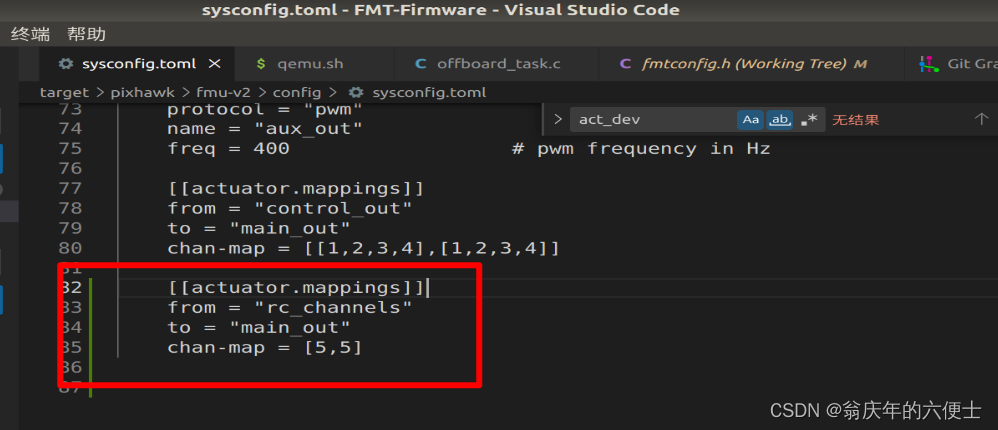
4、添加舵机接口,使用遥控上的旋钮控制pwm的输出
这里直接在sysconfig里面直接映射添加就可以了
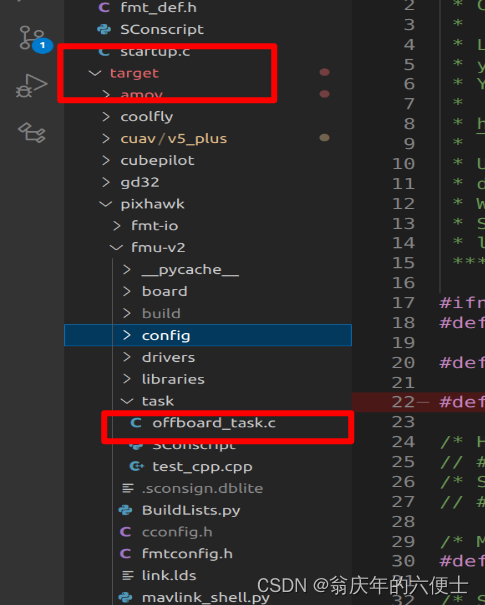
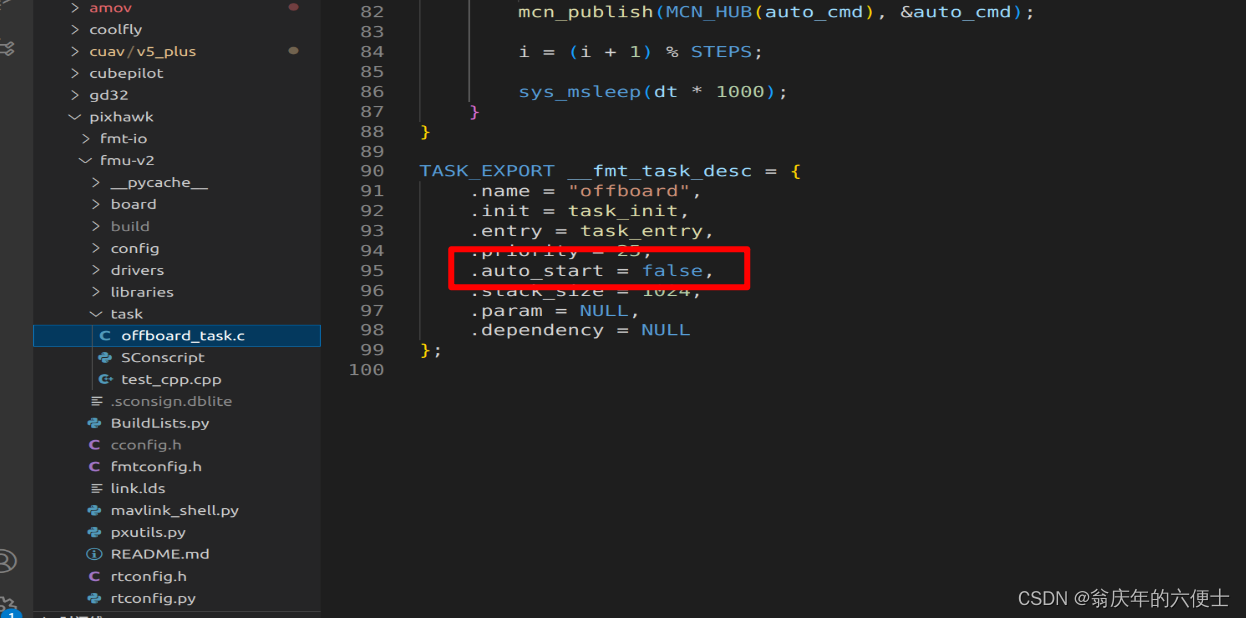
5、在v2上添加take_offboard,在SIH中运行offboard的demo
从qeum里面复制task_offboard的文件,粘贴在target的task目录下方
6、在V2上添加自定义的task,比如走一个矩形轨迹;
类似的,只要按照上面的task的模板写一个task,
最后设置自启动的方式,开机后就可以自动运行任务了;
相应的,可以通过下面的网站生成轨迹
https://www.wolframalpha.com/
7、添加遥控器失控返航的功能
需要在fms里面通过超时机制的方式添加一条RTH的通路
![[附源码]计算机毕业设计交通事故档案管理系统Springboot程序](https://img-blog.csdnimg.cn/8a30448c566141509256079e5e711f05.png)