💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
粒子滤波(Particle Filter)是一种基于蒙特卡洛采样的非线性滤波方法,常被应用于机器人自主导航和目标跟踪等领域。在地形辅助导航中,粒子滤波器可以用来估计机器人的位置和姿态,并结合地形信息进行导航。
粒子滤波器的基本思想是通过一系列粒子(即假设的机器人状态)来近似表示目标状态的后验概率分布。这些粒子在状态空间中进行随机采样,并通过观测数据进行权重更新,从而使得具有较高权重的粒子更加接近真实状态。最终,通过对粒子进行重采样,可以得到对目标状态的估计。
在地形辅助导航中,粒子滤波器可以结合地形地图和传感器数据来进行导航。地形地图可以提供地形信息,比如高度、坡度等,而传感器数据可以提供机器人当前位置的观测值。通过不断更新粒子的权重,并利用地形地图进行粒子采样和重采样,可以实现对机器人位置和姿态的准确估计。
PCRB(Probabilistic Concurrent Reachability-based Path Planning)是一种基于概率模型的路径规划方法,通过考虑环境中的不确定性和动态变化来生成鲁棒的路径。与传统的路径规划方法相比,PCRB方法能够在考虑传感器误差和环境变化的情况下,生成更加可靠和鲁棒的路径。
在地形辅助导航中,PCRB方法可以结合地形地图和传感器数据,考虑不确定性因素和环境变化,生成适应性强、鲁棒性好的导航路径。通过使用PCRB方法,可以更好地应对地形变化、传感器误差和其他环境不确定性,提高导航的精度和可靠性。
因此,通过结合粒子滤波器和PCRB方法,可以实现基于地形辅助导航的精确定位和鲁棒路径规划。这种方法能够更好地应对不确定性和环境变化,提高导航系统的性能和可靠性。
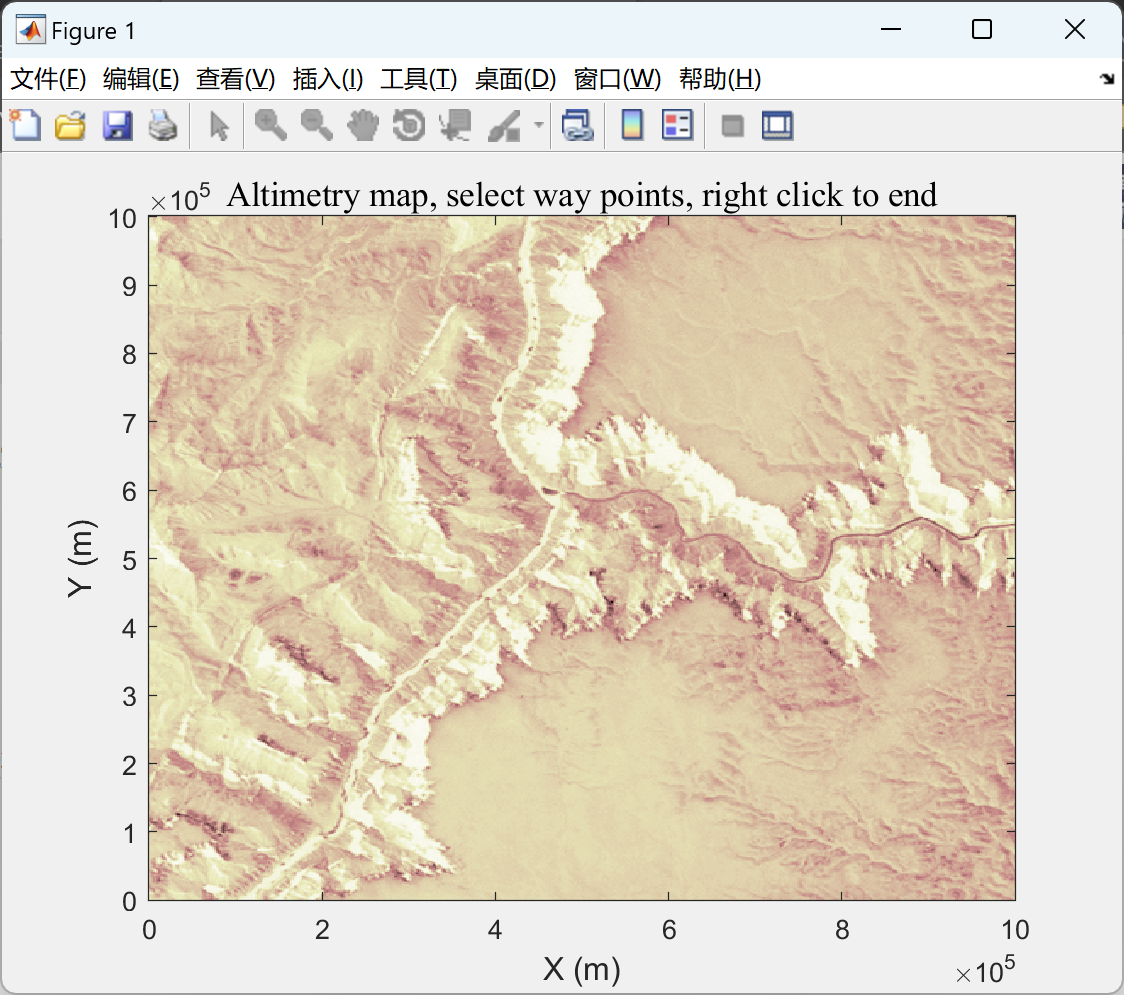
📚2 运行结果
部分代码:
% Bounds for navigation (altimetry) with the following dynamic system :
%
% X_1 = N(X1 , Q1)
% X_{k+1} = FkXk + Uk + N(0 , Qk)
% Zk = h(Xk) + N(0 , Rk(Xk))
%
% If nb_ite variable is > 1, RMSE is compared versus PCRB
%
% Demo can be easily extented for multivariate measurements (m > 1)
%
% Author S茅bastien PARIS (sebastien.paris@lsis.org)
% -------
%%
clear,clc , close all hidden;
options_affichage;
%% ---------------- Map --------------- %%
load colorado.mat
map = double(colorado);
clear colorado;
[nR , nC] = size(map);
%% ---------------- Parameters Simulation ---------------- %%
verbose = 2; %% 0 : nodisplay, 1 : map , 2 : map + measurements
N_part = 500000; % Number of particules
N_threshold = (6/10)*N_part;
nb_ite = 1; % Number of particule filter iteration to compute MSE & PCRB if nb_ite>1
M = 1000; % Number of paths used to evaluate PCRB
d = 4; % State dimension
m = 1; % Measurement dimension
alpha = 2.4477; % sqrt(chi2inv(0.95 , 2))
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
1. 黄宾,李一航. 基于粒子滤波的无人机地形辅助导航[J]. 光学 精密工程, 2019, 27(3):521-529.
2. 刘秋雨,李世鹏,冯春. 基于粒子滤波的地形车引导协同导航研究[J]. 自动化技术与应用, 2020, 41(5):106-114.
3. 刘麟麒,许晗豪,薛英俊. 基于粒子滤波的地形辅助导航算法研究[J]. 论文工程研究, 2018, 34(2):555-560.
4. 杨澜湘,周峰. 一种基于PCRB的地形辅助导航方法研究[J]. 电光与控制, 2020, 27(3):62-69.
5. 郑时瑜,赵静然,孙晓涛. 基于粒子滤波和PCRB的无人机地形辅助导航方法[J]. 信息技术, 2021, 40(1):166-170.