这部分比较抽象,我就不按照书本上的定义来了,直接讲直观的理解。
一般来说,我们认为:
这是一个圆,
但同时也可以认为他是一个一维的曲面。
同理
是一个球面
但同时也是一个二维的曲面,依次类推。
我们写出一个参数方程:
r是常数,a是参数,那么a就可以有自己的参数域(0,2π),注意,这是个开集,会挖掉一个点。
那么它的有效域也就少了一个点(0,r)
而这个映射本身就是一个图,因为少了一个点,所以无法用一个图来覆盖整个曲面。所以这不是一个初等曲面。需要再增加一个图,两个图形成一个图册,覆盖整个曲面。
三维也是如此,只是参数方程更加复杂。
一般的:
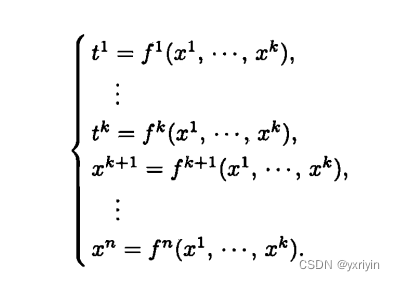
这就是Rn空间中的一个k维曲面。前提是雅克比矩阵行列式不为0.
中间插入了一点线性代数的知识。
假设两个空间中的基向量是v1,v2, w1,w2.
那么那么的基变换矩阵是A。
可以得到w1 = Av1, w2 = Av2
按照我们对线性代数的理解,应该是这样:
v1 v2
这个矩阵是从V空间变换到W空间,从计算上来说,
v1 = a11w1 + a21w2
所以,按照乘法运算,应该是AT
| a11 a21|
|a12 a22| 和向量(w1, w2)相乘
那么就是 a11w1 + a21w2, a12w1+ a22w2, 刚好是v1, v2
所以,矩阵变换把空间坐标v变到空间坐标w,而它的转置,则把基向量w变到基向量v
这里,我们还是重点来理解下线性变换,而不是坐标变换。
参考:线性变换与基变换是什么关系?是一个矩阵的两种理解角度么? - 知乎
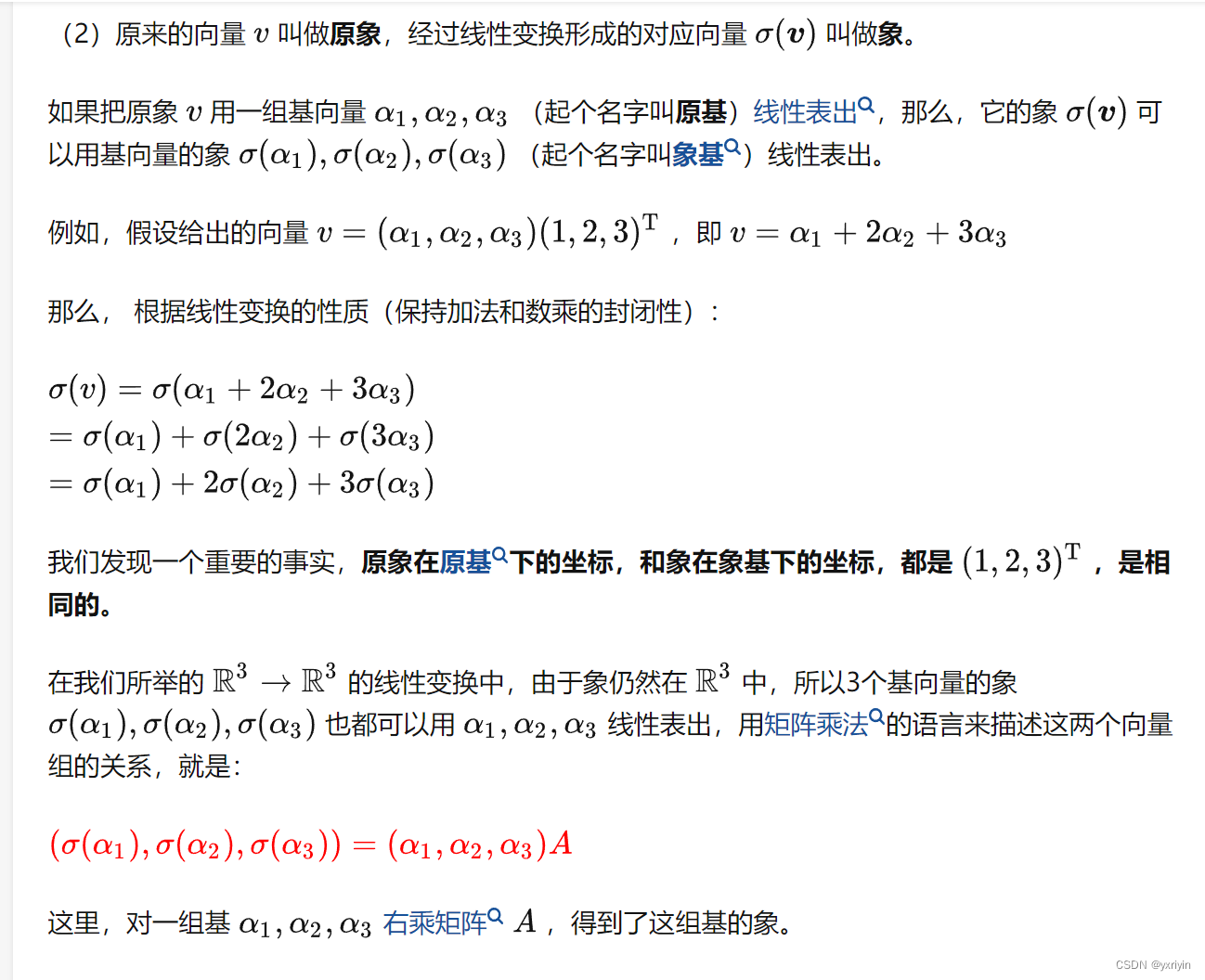
重点在于,对于原来的一组基,线性变换可以把这组基变成另外一组基。那么如果都考虑在原始的基下面,坐标变换是如何的呢?
我们假设这个线性变换的矩阵是A,
 原始向量v,在基下的坐标是X
原始向量v,在基下的坐标是X
那么经过线性变换后,在基下的坐标是Y
我们要找到X和Y的关系。
显然,Y=AX
直观的理解就是,如果基不变,那么线性变换代表的矩阵就是坐标变换。



两两相容的意思是公共作用域上的相互转换的雅克比行列式为正。


这里要注意,莫比乌斯环的法向量场是不存在的,因为饶了一圈之后,它的法线就反了。

要注意,这里面的偏导符号是边界的意思。


第一个图册是边界和内点的集合。R^k是这个曲面内点微分同胚的部分。
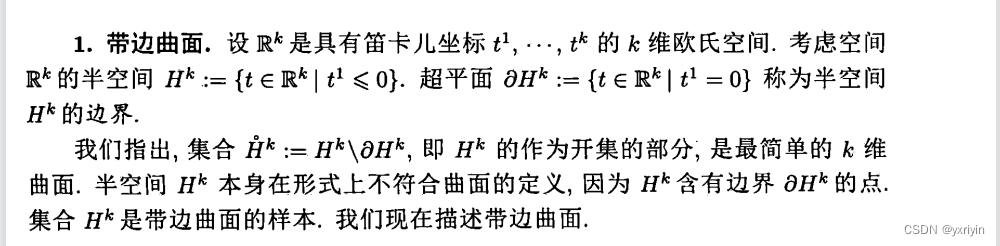
H^k是R^k的半空间。
所以边界首先是R^(k-1),因为它要低一维,同时它的映射要被限制到边界本身上即可。

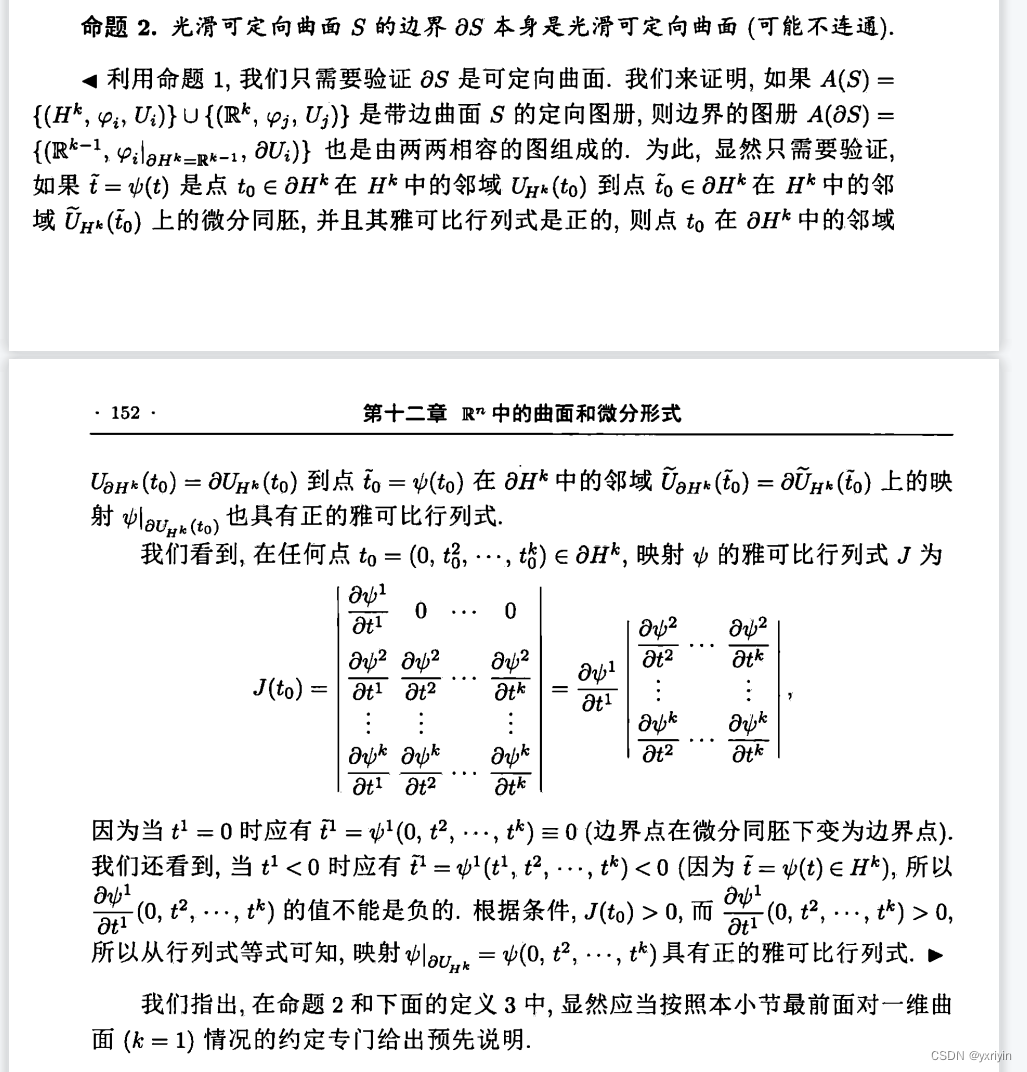
这个证明挺有意思的。考虑一个函数y=f(x1,x2,x3), 当x1=0的时候,y=0.
那么求当x1=0的时候y对x1,x2,x3的偏导。这个要从求导的本质来思考。首先当x1=0的时候,y=0,此时不论x2,x3怎么变换,y始终是0,也就是y对他们的变化率是0.所以y对x2,x3的求导就是0. 而如果把x1看成未知数,那么知道一个点的值并不能知道具体的导数。所以答案未知。