1.3.4 LDW系统功能定义
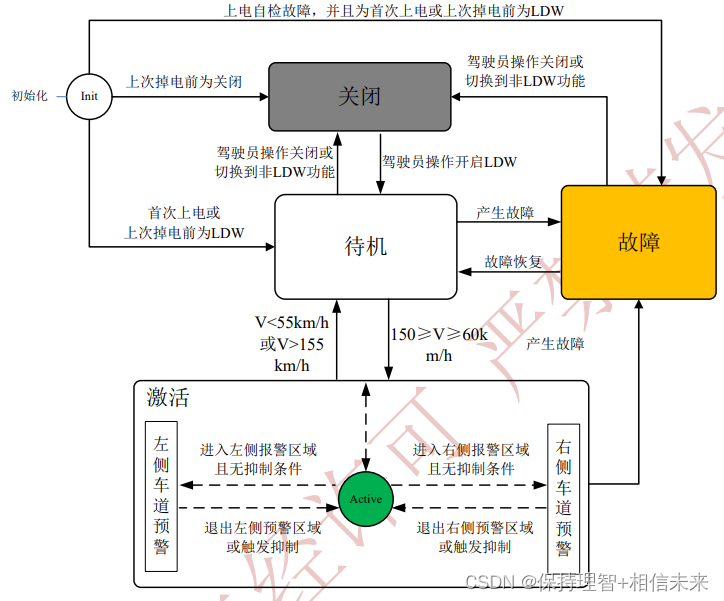
1.3.4.1 状态机
1.3.4.2 功能定义
1.3.4.2.1 信号需求列表
1.3.4.2.2 系统开启关闭
1)初始化
车辆上电后,车道偏离预警系统(LDW)进行初始化,控制器需要在上电后 220ms 内发出第一帧报文,并在 3s 内 完成内部自检,同时上电 3s 内不进行关联系统检测(上电 3s 内不报关联系统故障、不记录关联系统故障码)。
车道偏离预警系统内部自检:自检完成后,如果检测到前置智能摄像头或前向毫米波雷达,导致无法支持车道偏离预警系统,此时如果 LDW 功能上次掉电前为关闭状态(FC_LASModeSelectionStatus =0x7:off),保持 LDW 系统状态为关闭状态( FC_LDWStatus=0x0 : off ),如果 LDW 上次掉电前为开启或者系统首次上电 (FC_LASModeSelectionStatus=0x1 : LDW) ,则发送车道偏离预警系统状态为失效状态( FC_LDWStatus=0x3 : Failure),仪表根据系统状态进行显示。自检完无故障时,LDW 根据上次掉电前的状态切换到对应系统状态(0x0:off 或 0x1:standby)。
车道偏离预警系统关联系统检测:LDW 系统上电 3s 后,如果 LDW 功能开关为关闭时,不针对关联系统进行检测。 如果 LDW 功能开关为开启时,检测关联系统是否满足 LDW 功能正常工作要求,当 EPS 振动状态为故障时 (EPS_ConcussAvailabilityStatus=0x2:EPS Concuss failure EPS 振动故障不可用)且 LDW 预警方式包含“振动” 时 ( FC_LASWarningModeSelectionSts=0x2 或 0x3 ) ,需要发送车道偏离预警系统状态为失效状态 (FC_LDWStatus=0x3:Failure),仪表根据系统状态进行显示;其余信号和关联部件导致的降级策略参考 LDW 系统降级策略。
系统故障信息仅在系统处于开启状态下才发出。
2)系统开启关闭
车道偏离系统初始化完成后,可通过 HU 软开关对 LDW 进行开启、关闭设置:
① HU 里面选择 HU_LASModeSelection 为 0x1:LDW,LDW 系统接收到选择信号后,开启 LDW 功能,如果关联系统均满足 LDW 开启要求,LDW 状态切换为“开启”(FC_LDWStatus =0x1:Standby 或 0x2:Active),如果关联系统不满足 LDW 开启要求,LDW 状态切换为失效状态(FC_LDWStatus=0x3:Failure)。
② HU 里面选择 HU_LASModeSelection 为 0x7:OFF,LDW 系统接收到选择信号后,关闭功能(FC_LDWStatus=0x0: off)。
备注:
① 车道辅助系统(包括 LDW、LKA、LCS)出厂默认为开启 LDW 状态,系统第一次上电发出厂默认值 0x1=LDW;整车下电时,系统自动记录下电前的功能设置状态,下一次上电时自动恢复上次掉电的记录状态,并将FC_LASModeSelectionStatus、FC_LDWStatus 置为相应值发出。
② 车辆为 ON 档时,可通过 HU 对 LDW 系统工作状态进行设置。
③ 通过 HU 设置“功能选择”时,HU 将事件型信号“HU_LASModeSelection”置为相应值(预警,纠偏,对中),并通过网关转发给车道辅助系统。车道辅助系统收到该信号后响应功能选择设置,将周期性信号 “FC_LASModeSelectionStatus”置为对应值,并通过网关转发给 HU,HU 收到 “FC_LASModeSelectionStatus”信号后,将 UI 界面“功能选择”软开关置为对应值。仅当 “HU_LASModeSelection”信号为 0x1:LDW(预警)时,LDW 功能才开启。
④ 系统处于故障状态(非控制器硬件、通讯等故障,如关联系统故障导致的故障等)下,也能响应设置需求。故障恢复后,应根据用户最新设置的状态切换到相应的状态(预警、纠偏、对中)。
⑤ HU 发送 HU_LASModeSelection=Invalid 、 Inactive 或 reserved 时 , LAS 模式选择信号 FC_LASModeSelectionStatus 保持原来状态不变化。
1.3.4.2.3 系统待机
1) LDW 功能开启时且系统无故障。如果车速小于 60km/h,此时 LDW 将工作状态待机状态;仪表接收到相应信号后将 LDW 状态显示到屏幕上。
2) 若 LDW 系统处于激活状态,同时车速小于 55km/h,此时 LDW 将退回到待机状态,仪表接收到相应信号后将 LDW 状态显示到屏幕上。
3) 若 LDW 系统处于预警状态,同时接收到车速小于 55m/h,此时 LDW 将退回到待机状态,仪表接收到相应信号后将 LDW 状态显示到屏幕上。
1.3.4.2.4 系统激活
1) LDW 系统启用后,若系统处于待机状态,此时车速大于 60km/h 且小于 150km/h , LDW 功能激活 (FC_LDWStatus=0x2:Active)。
2) LDW 系统处于激活状态时(FC_LDWStatus=0x2:Active),若车速降低到 55km/h,此时,LDW 系统工作状态保持为激活状态,若车速降低到 55km/h 以下,则 LDW 工作状态变为待机(FC_LDWStatus=0x1:Standby)。
3) 若车辆处于倒挡(R)时,系统无法被激活。
4) 当系统处于激活状态,车速增加但不超过 150km/h 时,此时 LDW 工作状态信号保持为激活状态。
1.3.4.2.5 车道线识别
车道偏离控制器完成初始化后,系统车道线识别功能正常时(无影响车道线识别的 error,如摄像头失明,内部元器件故障等),系统需要输出车道线检测结果。系统可以识别不同类型(实线、虚线、点状线等)和颜色(黄色、白色等)的道路的道路交通线。
1.3.4.2.6 车道偏离预警
1) 车道偏离预警系统激活后,如果检测到车辆车轮外边缘距离车道线的距离小于 X(可标定)时,发出预警信息。
2) LDW 预警告方式有“①声音,②振动,③声音+振动” 三种方式。三种方式的选择通过 HU 的车道偏离预警的模式选择信号“HU_LASWarningModeSelection”进行选择,车道辅助系统接收到信号后改变预警模式并反馈给 HU( “FC_LASWarningModeSelectionSts”)。即使 LDW 系统处于故障状态下(通讯正常时均能响应),也能响应设置需求。
3) 用户选择多种报警方式后,LDW 在报警条件满足时,应同步发出各种报警信号,并同步结束,若各个信号的周期不同,则按照信号定义周期发送信号。预警方式默认出厂为 0x2=振动报警。LDW 需记忆用户上一次的“预警方式”设置状态,并在下次上电时,将上次上电时的“FC_LASWarningModeSelectionSts”发送给 HU。
① 仪表图像报警
LDW 在三种警告方式下都需要发出仪表图像报警请求信号。
当 LDW 系统监测到车辆右侧即将压线时且抑制条件未触发,则 LDW 将“FC_HostLaneRightStatus” 信号置为右侧压线报警“0x3:Warning”状态通过 CAN 总线发送给仪表,仪表接收到信号后进行右侧压线图像报警。
当 LDW 监测到车辆左侧即将压线时且抑制条件未触发,则 LDW 将“FC_HostLaneLeftStatus” 信号置为左侧压线报警“0x3:Warning”状态通过 CAN 总线发送给仪表,仪表接收到信号后进行左侧压线图像报警。
② 声音报警
LDW系统有声音报警有以下两种情况:
1) LDW警告方式信号仅声音报警“FC_LASWarningModeSelectionSts”为“0x1:sound”;
2) LDW 警告方式为声音和振动同时报警 “FC_LASWarningModeSelectionSts ” 为 “ 0x3 : sound and vibration”;
LDW 监测到车辆左侧或右侧即将压线时且抑制条件未触发,LDW 将“ACC_Voiceinfo”信号置为“0x6:LDW/ELK Left Warning 左报警”或“0x7:LDW/ELK Right Warning 右报警” 状态通过 CAN 总线发送给仪表或 AMP,仪表或 AMP 接收到信号后驱动蜂鸣器进行报警,声音报警根据 LDW 发出的信号的时长以 1s 为周期进行报警。LDW 需根据车辆压线状态来发出报警信号,单次报警时长在 500ms~2700ms (可标定)范围内。
③ EPS 振动报警
系统EPS振动报警有以下两种情况:
1) LDW警告方式为仅振动,信号“FC_LASWarningModeSelectionSts”为“0x2:vibration”;
2) LDW 警告方式为振动和声音报警,信号 “FC_LASWarningModeSelectionSts ” 为 “ 0x3 : sound and vibration”;
LDW监测到车辆左侧或右侧即将压线时且抑制条件未触发,LDW将“FC_LDWVibrationWarningReq”信号置为 “0x1:Left Warning左报警”或“0x2:Right Warning右报警” 状态通过CAN总线发送给EPS,EPS接收到信号后进行振动报警。单次报警时长在500ms~2700ms(可标定)范围内,即驾驶员压线行驶时,系统最多发送2700ms振动报警请求。
EPS振动频率为10-100Hz(根据具体车型标定)。
EPS响应振动报警:当EPS接收到LDW发送FC_LDWStatus为0x2:active,同时接收到LDW发送的振动报警信号 FC_LDWVibrationWarningReq=0x1:Left Warning或0x2:Right Warning时,EPS控制方向盘按相应设置强度振动一个周期。
每个周期连续振动三次,每次振动时间220ms(可标定),每次振动后间隔110ms(可标定)。为避免错误触发下一个振动周期,第三次振动结束后停止120ms(可标定),每个振动周期的总时长可设为1000ms(总时长可标定),EPS 执行一个周期振动过程中(1000ms,可标定),不响应新的报警需求(包括LDW报警需求),在一个振动周期结束后再判断并响应新的报警需求。两次振动的间隔由LDW控制,EPS不做间隔判断。
LDW报警时,根据具体的设置,可能同时包括声音报警和振动报警,此时要求声音和振动在开始报警和停止报警时间上基本保持同步。为保证声音和振动同步,可能通过调整仪表声音持续时间或EPS振动时长的标定值来实现。
EPS 发出是否可以响应 LDW 的振动报警需求 EPS_ConcussAvailabilityStatus 方向盘振动状态信号给 LAS。如果 LDW 激活时,接收到 0x0:Concuss Availability 信号则正常报警;接收到 0x2:EPS Concuss failure,根据 LDW 预警方式的选择:
若预警方式不包含“振动”LDW 仅记录 DTC 但不进入故障模式,若预警方式包含“振动”LDW 记录 DTC 同时进入故障模式。
③ 报警区域
车轮进入报警区域(可标定;为车道线内侧±30cm(可标定))且有相应的横向偏离速度(XX,可标定),LDW 才发出报警信号。在进入报警区域的一个周期内,若激活一次报警后,因抑制条件退出报警时,再次满足报警条件时, LDW 不应该再次请求报警。
LDW 发出的报警信号为连续信号,非脉冲信号,单次报警时长最短 500ms(可标定),最长 2.7s(可标定)。车辆连续压线行驶时,只在进入报警区域时开始发出报警,2.7s 后不再发出报警。车辆偏离车道,车轮驶出报警区域停止发送报警信号,车辆偏离侧车轮驶出报警区域,但并未完成换道,车辆回到原车道行驶过程中,车轮压过报警区域不触发二次报警。车辆换道时(两前轮连续压过同一条车道线),另一侧车轮压过车道线时,不触发报警。LDW 系统不应同时发出两侧报警信号。
1.3.4.2.7 系统退出
LDW 满足预警条件,并且发出预警信息后,如果出现以下情况,LDW 将退出预警,进入激活状态:
1)更高优先级系统触发,如 ABS、ESC、AEB 等持续 3s(可标定),ABS 和 ESP 激活 ESP_ActiveStatus=active 或 ESP_OnlyABSActive =active 或 ESP_TCSActive =active 或 ESP_VDCActive=active 或 ACC_AEBActive=active,,系统退出预警,直到高优先级响应结束,并持续 1s(可标定),恢复预警;
2)LDW 接收到 BCM 发送的驾驶员打对应侧的转向灯开关信号“BCM_TurnLightSwitchSts”为激活状态;
3)收到 BCM 发送过来的危险报警灯信号“BCM_emergencylightstatus”为激活状态;
4)转角速率:方向盘转角速率大于激活阈值,条件满足后立即退出报警。方向盘转角速率小于解除阈值时恢复纠偏,条件满足后需等待 2s(可标定)以恢复报警;
5)车速降至 55km/h 以下,系统进入 standby;
6)车速超过 155km/h,系统进入 standby;
7)车道过宽:LaneWidth > 5.5m(可标定)持续 3s(可标定),系统退出预警。LaneWidth < 4.5m (可标定)持续 1s(可标定)恢复预警;
8)车道过窄:LaneWidth < 2.5m(可标定)持续 3s(可标定),系统退出预警。LaneWidth > 3m(可标定)持续 1s(可标定)恢复预警;
9)YawRate > 0.25 rad/s(可标定)持续 4s(可标定),系统退出预警。YawRate < 0.2 rad/s(可标定)持续 1s(可标定),恢复预警;
10)弯道半径:弯道半径小于 150m(可标定)持续 2s(可标定),系统退出预警。弯道半径大于 200m(可标定) 持续 4s(可标定),恢复预警;
11)车道线丢失:两侧车道线两条持续 1 s(可标定)未被探测到时,系统退出预警。两侧车道线均被探测到,且持续 2s(可标定)时恢复预警;
12)偏离进入别的车道时系统退出预警,系统检测到新的车道线目标恢复。
13)当 LDW 系统处于待机或关闭状态,同时车轮已在报警区域,此时激活 LDW,系统报警一次后退出。在车辆进入安全区域后持续 1s(可标定),解除抑制。
14)驾驶员主动控制车辆回到车道内,系统退出预警。
15)IACC 系统处于激活状态 Active 或临时退出状态 Suspend 时,系统退出预警。
16)ELK/ESS 系统处于激活状态时,系统退出预警。
LDW 立刻将报警信号设置为不报警状态,仪表、EPS 接收到此信号后退出报警状态。
1.3.4.2.8 系统抑制
存在如下抑制条件时,LDW 系统被抑制,无法激活,直到抑制条件解除:
1)更高优先级系统触发,如 ABS 、 ESC 、 AEB 等持续 3s (可标定), ABS 和 ESP 激 活 ESP_ActiveStatus=active 或 ESP_OnlyABSActive =active 或 ESP_TCSActive =active 或 ESP_VDCActive=active 或 ACC_AEBActive=active,系统抑制,直到高优先级响应结束,并持续 1s(可标定),解除抑制;
2)LDW 接收到 BCM 发送的转向灯开关信号“BCM_TurnLightSwitchSts”为激活状态,系统抑制对应侧的功能;
3)收到 BCM 发送过来的危险报警灯信号“BCM_emergencylightstatus”为激活状态;
4)转角速率:方向盘转角速率大于激活阈值,系统被抑制。方向盘转角速率小于解除阈值时恢复纠偏,条件满足后需等待 2s(可标定)以解除抑制;
5)系统为 standby,车辆加速,车速在 60km/h 以下,系统抑制,直到车速达到或超过 60km/h;
6)车速超过 155km/h,系统进入 standby,直到车速降至 150km/h 及以下;
7)车道过宽,LaneWidth > 5.5m(可标定),系统抑制,LaneWidth <4.5m(可标定)持续 1s(可标定) 解除抑制;
8)车道过窄,LaneWidth < 2.5m(可标定),系统抑制,LaneWidth > 3m(可标定)持续 1s(可标定)解除抑制;
9)YawRate > 0.25 rad/s,系统被抑制。YawRate < 0.2 rad/s(可标定)持续 1s(可标定),解除抑制;
10)弯道半径:弯道半径小于 150m(可标定)系统抑制。弯道半径大于 200m(可标定)持续 4s(可标定),解除抑制;
11)车道线丢失:至少有一侧车道线持续 3s(可标定)未被探测到时触发该侧抑制,两侧车道线均被探测到,且持续持续 3s(可标定)时解除抑制。
12)偏离进入别的车道时系统退出预警,系统检测到新的车道线目标解除抑制。
13)当 LDW 系统处于待机或关闭状态,同时车轮已在报警区域,此时激活 LDW,系统报警一次后如果一直压线行驶,系统抑制报警。在车辆进入安全区域后持续 1s(可标定),解除抑制。
14)IACC 系统处于激活状态 Active 或临时退出状态 Suspend 时,抑制 LDW 激活。
15)ELK/ESS 系统处于激活状态时,抑制 LDW 激活。
1.3.4.2.9 系统显示
TBD
1.3.4.2.10 系统设置
LDW 系统设置情况如下:
1)LDW 开启/关闭设置
用户可在 HU 内,选择 LAS 的辅助模式,包含:关闭、预警、纠偏、对中,出厂默认为预警。
当用户选择后,HU 发送 HU_LASModeSelection 对应的值,系统设置成功后发送 FC_LASModeSelectionStatus 给 HU,HU 改变设置,显示在屏幕上。
HU 发送 Invalid、Inactive 或 reserved 时,LAS 模式设置不响应。
2)LDW 报警方式设置
用户可在 HU 内,选择 LDW 预警方式,包含:声音、振动、声音和振动,出厂默认为振动。
当用户选择后,HU 发送 HU_LASWarningModeSelection 对应值给 LDW 系统,系统设置成功后发送 FC_LASWarningModeSelectionSts 对应值给 HU,HU 改变设置,显示在屏幕上。任何报警模式下,图像显示都包含。
HU 发送 Invalid、Inactive 或 reserved 时,LDW 报警方式设置不响应。
1.3.4.2.11 系统失效
LDW 系统失效存在两种情况,一种是实现 LDW 系统的硬件出现问题,无法支持,另外一种是支持 LDW 系统的关联部件出现故障或失效,无法满足 LDW 需求。
1)关联系统失效
| 序号 | 关联系统问题 | LDW 系统处理逻辑 | 失效是否可恢复 |
| 1 | 车外温度信号无效或丢失时 | 系统正常工作,不失效 | - |
| 2 | 开关信号无效或丢失时 | 系统正常工作,不失效 | - |
| 3 | 前吹风模式无效或丢失时 | 系统正常工作,不失效 | - |
| 4 | 前雨刮工作状态无效或丢失时 | 系统正常工作,不失效 | - |
| 5 | 紧急报警灯状态无效或丢失时 | 系统正常工作,不失效 | - |
| 6 | 全雨刮刮速状态无效或丢失时 | 系统正常工作,不失效 | - |
| 7 | 时间信号无效或丢失时 | 系统正常工作,不失效 | - |
| 8 | EPS 方向盘振动状态无效或丢失时 | 1、LDW 选择含振动报警时,系统失效,记录 DTC 2、LDW 选择仅声音报警时,系统正常工作, 记录 DTC | 可恢复 |
| 9 | LAS 模式选择信号无效或丢失时 | 系统正常工作,不失效 | - |
| 10 | LDW 警告方式无效或丢失时 | 系统正常工作,不失效 | - |
| 11 | TCU 信号无效或信号丢失时 | LDW 系统失效,记录 DTC | 可恢复 |
| 12 | 加速踏板信号异常或信号丢失 | LDW 系统失效,记录 DTC | 可恢复 |
| 13 | 发动机运行状态异常或信号丢失 | LDW 系统失效,记录 DTC | 可恢复 |
| 14 | 里程信号 | 系统正常工作,不失效 | - |
| 15 | ESP 轮速,车速相关信号异常或信号丢失 | LDW 系统失效,记录 DTC | 可恢复 |
| 16 | SAS 相关信号异常或丢失 | LDW 系统失效,记录 DTC | 可恢复 |
| 17 | 总线 BUS OFF | LDW 系统失效,记录 DTC | 可恢复 |
2)系统相关硬件故障
| 序号 | 关联系统问题 | LDW 系统处理逻辑 | 失效是否可恢复 |
| 1 | 中央控制器故障 | LDW 系统失效,记录 DTC | 是 |
| 2 | 摄像头失明,未校准 | LDW 系统失效,记录 DTC | 是 |
| 3 | 摄像头控制器故障 | LDW 系统失效,记录 DTC | 是 |
| 4 | 高低电压 | LDW 系统失效,记录 DTC | 是 |
3)失效特殊处理逻辑
① 当发动机处于 EMS_EngineStatus=stop,crank 状态,或发动机从 crank 到 running 后 5 秒,LDW 系统不监控轮速信号,轮速方向和轮速脉冲信号。
② LDW 系统在车速≤1km/h 时,不对轮速及轮速方向信号进行监控。
③ 摄像头检测到失明时,系统 5 分钟后报失效,记录 DTC 且本点火周期内可恢复;5 分钟内,各基于摄像头探测结果的功能根据目标探测结果按照原逻辑执行提示、报警、控制等;10 分钟后永久失明,报失效且记录 DTC。