DMA介绍
什么是DMA?
令人头秃的描述:
DMA(Direct Memory Access,直接存储器访问) 提供在外设与内存、存储器和存储器、外设 与外设之间的高速数据传输使用。它允许不同速度的硬件装置来沟通,而不需要依赖于 CPU,在这个时间中,CPU对于内存的工作来说就无法使用。
简单描述: 就是一个数据搬运工!!
DMA的意义
代替 CPU 搬运数据,为 CPU 减负。
1. 数据搬运的工作比较耗时间;
2. 数据搬运工作时效要求高(有数据来就要搬走);
3. 没啥技术含量(CPU 节约出来的时间可以处理更重要的事)。
搬运什么数据?
存储器、外设
这里的外设指的是spi、usart、iic、adc 等基于APB1 、APB2或AHB时钟的外设,而这里的存 储器包括自身的闪存(flash)或者内存(SRAM)以及外设的存储设备都可以作为访问地源或者目 的
三种搬运方式:
- 存储器→存储器(例如:复制某特别大的数据buf)
- 存储器→外设 (例如:将某数据buf写入串口TDR寄存器)
- 外设→存储器 (例如:将串口RDR寄存器写入某数据buf)


DMA 控制器
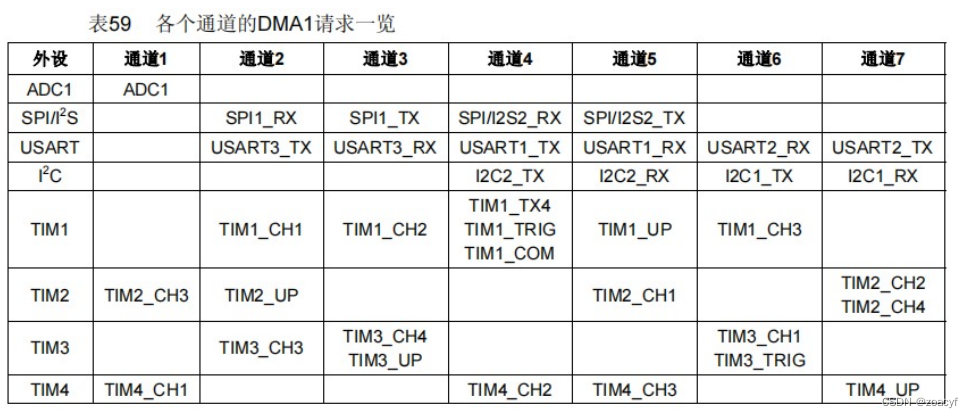
STM32F103有2个 DMA 控制器,DMA1有7个通道,DMA2有5个通道。
一个通道每次只能搬运一个外设的数据!! 如果同时有多个外设的 DMA 请求,则按照优先级进 行响应。
DMA1有7个通道:
DMA2有5个通道

DMA及通道的优先级
优先级管理采用软件+硬件:
- 软件: 每个通道的优先级可以在DMA_CCRx寄存器中设置,有4个等级 最高级>高级>中级>低级
- 硬件: 如果2个请求,它们的软件优先级相同,则较低编号的通道比较高编号的通道有较高 的优先权。 比如:如果软件优先级相同,通道2优先于通道4
DMA传输方式
- DMA_Mode_Normal(正常模式) 一次DMA数据传输完后,停止DMA传送 ,也就是只传输一次
- DMA_Mode_Circular(循环传输模式) 当传输结束时,硬件自动会将传输数据量寄存器进行重装,进行下一轮的数据传输。 也就是 多次传输模式
指针递增模式
外设和存储器指针在每次传输后可以自动向后递增或保持常量。当设置为增量模式时,下一个要 传输的地址将是前一个地址加上增量值。

实验一、内存到内存搬运
实验要求 :使用DMA的方式将数组A的内容复制到数组B中,搬运完之后将数组B的内容打印到屏幕。
CubeMX上DMA 配置

用到的库函数
1. HAL_DMA_Start
HAL_StatusTypeDef HAL_DMA_Start(DMA_HandleTypeDef *hdma, uint32_t SrcAddress, uint32_t DstAddress, uint32_t DataLength)
- 参数一:DMA_HandleTypeDef *hdma,DMA通道句柄
- 参数二:uint32_t SrcAddress,源内存地址
- 参数三:uint32_t DstAddress,目标内存地址
- 参数四:uint32_t DataLength,传输数据长度。注意:需要乘以sizeof(uint32_t)
- 返回值:HAL_StatusTypeDef,HAL状态(OK,busy,ERROR,TIMEOUT)
2. __HAL_DMA_GET_FLAG
#define __HAL_DMA_GET_FLAG(__HANDLE__, __FLAG__) (DMA1->ISR & (__FLAG__))
- 参数一:HANDLE,DMA通道句柄
- 参数二:FLAG,数据传输标志。DMA_FLAG_TCx表示数据传输完成标志
- 返回值:FLAG的值(SET/RESET)
代码实现
1. 开启数据传输
2. 等待数据传输完成
3. 打印数组内容
#define BUF_SIZE 16
// 源数组
uint32_t srcBuf[BUF_SIZE] = {
0x00000000,0x11111111,0x22222222,0x33333333,
0x44444444,0x55555555,0x66666666,0x77777777,
0x88888888,0x99999999,0xAAAAAAAA,0xBBBBBBBB,
0xCCCCCCCC,0xDDDDDDDD,0xEEEEEEEE,0xFFFFFFFF
};
// 目标数组
uint32_t desBuf[BUF_SIZE];
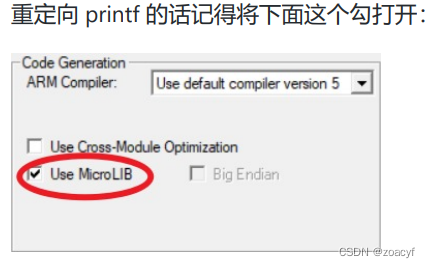
int fputc(int ch, FILE *f)
{
unsigned char temp[1]={ch};
HAL_UART_Transmit(&huart1,temp,1,0xffff);
return ch;
}
main函数里:
// 开启数据传输
HAL_DMA_Start(&hdma_memtomem_dma1_channel1,
(uint32_t)srcBuf, (uint32_t)desBuf, sizeof(uint32_t) * BUF_SIZE);
// 等待数据传输完成
while(__HAL_DMA_GET_FLAG(&hdma_memtomem_dma1_channel1, DMA_FLAG_TC1) == RESET);
// 打印数组内容
for (i = 0; i < BUF_SIZE; i++)
printf("Buf[%d] = %X\r\n", i, desBuf[i]);
实验二、内存到外设搬运
实验要求 :使用DMA的方式将内存数据搬运到串口1发送寄存器,同时闪烁LED1。
CubeMX上DMA 配置

用到的库函数
HAL_UART_Transmit_DMA HAL_StatusTypeDef
HAL_UART_Transmit_DMA(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)
- 参数一:UART_HandleTypeDef *huart,串口句柄
- 参数二:uint8_t *pData,待发送数据首地址
- 参数三:uint16_t Size,待发送数据长度
- 返回值:HAL_StatusTypeDef,HAL状态(OK,busy,ERROR,TIMEOUT)
代码实现
1. 准备数据
2. 将数据通过串口DMA发送
#define BUF_SIZE 1000
// 待发送的数据
unsigned char sendBuf[BUF_SIZE];
main函数里
// 准备数据
for (i = 0; i < BUF_SIZE; i++)
sendBuf[i] = 'A';
// 将数据通过串口DMA发送
HAL_UART_Transmit_DMA(&huart1, sendBuf, BUF_SIZE);
while (1)
{
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_8);
HAL_Delay(100);
}
实验三、外设到内存搬运
实验要求 :使用DMA的方式将串口接收缓存寄存器的值搬运到内存中,同时闪烁LED1。
CubeMX上DMA 配置


用到的库函数
1. __HAL_UART_ENABLE
#define __HAL_UART_ENABLE_IT(__HANDLE__, __INTERRUPT__) ((((__INTERRUPT__) >> 28U) == UART_CR1_REG_INDEX)? ((__HANDLE__)->Instance->CR1 |= ((__INTERRUPT__) & UART_IT_MASK)): \ (((__INTERRUPT__) >> 28U) == UART_CR2_REG_INDEX)? ((__HANDLE__)->Instance->CR2 |= ((__INTERRUPT__) & UART_IT_MASK)): \ ((__HANDLE__)->Instance- >CR3 |= ((__INTERRUPT__) & UART_IT_MASK)))
- 参数一:HANDLE,串口句柄
- 参数二:INTERRUPT,需要使能的中断
2. HAL_UART_Receive_DMA
HAL_StatusTypeDef HAL_UART_Receive_DMA(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)
- 参数一:UART_HandleTypeDef *huart,串口句柄
- 参数二:uint8_t *pData,接收缓存首地址
- 参数三:uint16_t Size,接收缓存长度
- 返回值:HAL_StatusTypeDef,HAL状态(OK,busy,ERROR,TIMEOUT)
3. __HAL_UART_GET_FLAG
#define __HAL_UART_GET_FLAG(__HANDLE__, __FLAG__) (((__HANDLE__)->Instance->SR & (__FLAG__)) == (__FLAG__))
- 参数一:HANDLE,串口句柄
- 参数二:FLAG,需要查看的FLAG
- 返回值:FLAG的值
4. __HAL_UART_CLEAR_IDLEFLAG
#define __HAL_UART_CLEAR_IDLEFLAG(__HANDLE__) __HAL_UART_CLEAR_PEFLAG(__HANDLE__)
- 参数一:HANDLE,串口句柄
- 返回值:无
5. HAL_UART_DMAStop
HAL_StatusTypeDef HAL_UART_DMAStop(UART_HandleTypeDef *huart)
- 参数一:UART_HandleTypeDef *huart,串口句柄
- 返回值:HAL_StatusTypeDef,HAL状态(OK,busy,ERROR,TIMEOUT)
6. __HAL_DMA_GET_COUNTER
#define __HAL_DMA_GET_COUNTER(__HANDLE__) ((__HANDLE__)->Instance->CNDTR)
- 参数一:HANDLE,串口句柄
- 返回值:未传输数据大小
代码实现
如何判断串口接收是否完成?
如何知道串口收到数据的长度?
使用串口空闲中断(IDLE)!
串口空闲时,触发空闲中断; 空闲中断标志位由硬件置1,软件清零
利用串口空闲中断,可以用如下流程实现DMA控制的任意长数据接收:
1. 使能IDLE空闲中断;
2. 使能DMA接收中断;
3. 收到串口接收中断,DMA不断传输数据到缓冲区;
4. 一帧数据接收完毕,串口暂时空闲,触发串口空闲中断;
5. 在中断服务函数中,清除中断标志位,关闭DMA传输(防止干扰);
6. 计算刚才收到了多少个字节的数据。
7. 处理缓冲区数据,开启DMA传输,开始下一帧接收。
有三个文件需要修改:
main.c
uint8_t rcvBuf[BUF_SIZE]; // 接收数据缓存数组
uint8_t rcvLen = 0; // 接收一帧数据的长度
__HAL_UART_ENABLE_IT(&huart1, UART_IT_IDLE); // 使能IDLE空闲中断
HAL_UART_Receive_DMA(&huart1,rcvBuf,100); // 使能DMA接收中断
while (1)
{
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_8);
HAL_Delay(300);
}main.h
#define BUF_SIZE 100stm32f1xx_it.c
extern uint8_t rcvBuf[BUF_SIZE];
extern uint8_t rcvLen;
void USART1_IRQHandler(void)
{
/* USER CODE BEGIN USART1_IRQn 0 */
/* USER CODE END USART1_IRQn 0 */
HAL_UART_IRQHandler(&huart1);
/* USER CODE BEGIN USART1_IRQn 1 */
if((__HAL_UART_GET_FLAG(&huart1,UART_FLAG_IDLE) == SET)) // 判断IDLE标志位是否被置位
{
__HAL_UART_CLEAR_IDLEFLAG(&huart1);// 清除标志位
HAL_UART_DMAStop(&huart1); // 停止DMA传输,防止干扰
uint8_t temp=__HAL_DMA_GET_COUNTER(&hdma_usart1_rx);
rcvLen = BUF_SIZE - temp; //计算数据长度
HAL_UART_Transmit_DMA(&huart1, rcvBuf, rcvLen);//发送数据
HAL_UART_Receive_DMA(&huart1, rcvBuf, BUF_SIZE);//开启DMA
}
/* USER CODE END USART1_IRQn 1 */
}