HAL串口发送/接收函数:
- HAL_UART_Transmit(); 串口发送数据,使用超时管理机制
- HAL_UART_Receive(); 串口接收数据,使用超时管理机制
- HAL_UART_Transmit_IT(); 串口中断模式发送
- HAL_UART_Receive_IT(); 串口中断模式接收
HAL_UART_Transmit(); 串口发送数据,使用超时管理机制
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)
作用:以阻塞的方式发送指定字节的数据
形参 1 :UART_HandleTypeDef 结构体类型指针变量
形参 2:指向要发送的数据地址
形参 3:要发送的数据大小,以字节为单位
形参 4:设置的超时时间,以ms单位
HAL_UART_Receive_IT(); 串口中断模式接收
HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)
作用:以中断的方式接收指定字节的数据
形参 1 是 UART_HandleTypeDef 结构体类型指针变量
形参 2 是指向接收数据缓冲区
形参 3 是要接收的数据大小,以字节为单位 此函数执行完后将清除中断,需要再次调用以重新开启中断。
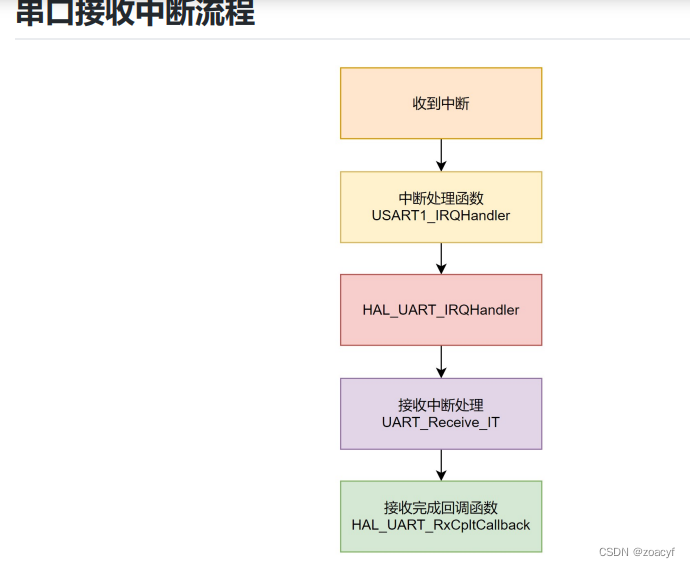
串口中断回调函数:
- HAL_UART_IRQHandler(UART_HandleTypeDef *huart); //串口中断处理函数 HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart); //发送中断回调函数 HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart); //接收中断回调函数
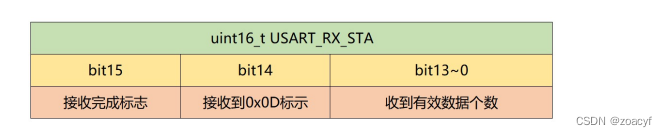
状态标记变量:
USART_RX_STA
从0开始,串口中断接收到一个数据(一个字节)就自增1。当数据读取全部OK时候(回车和换行 符号来的时候),那么 USART_RX_STA的最高位置1,表示串口数据接收全部完毕了,然后main 函数里面可以处理数据了。
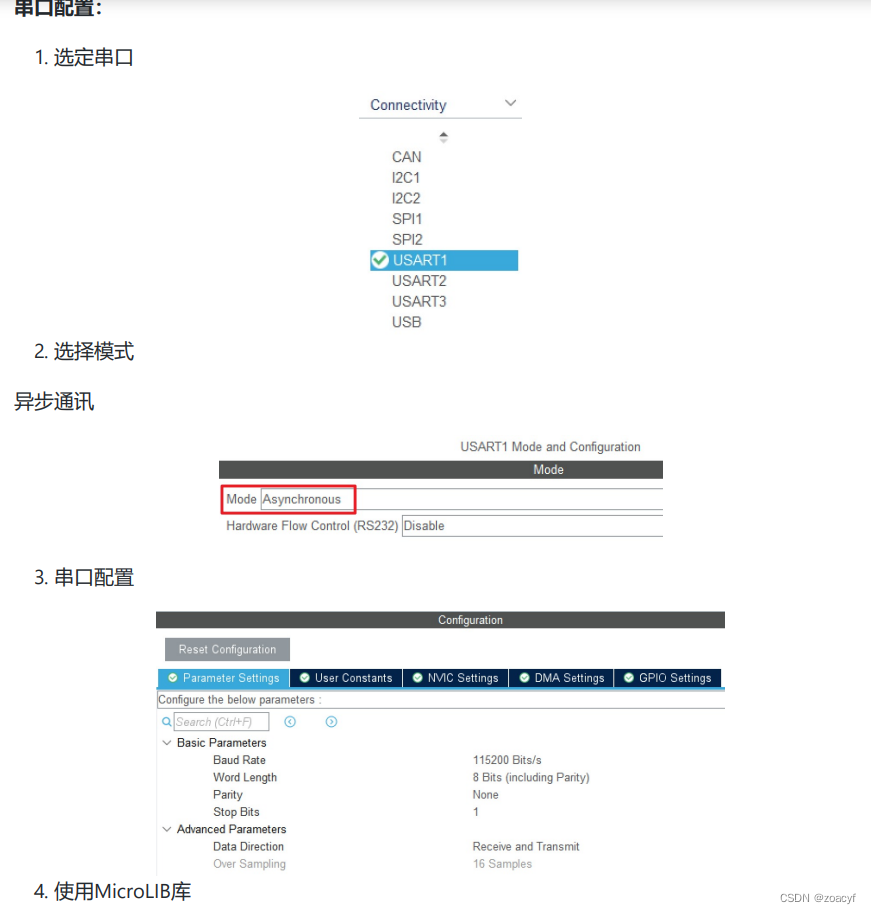
串口实验(非中断)串口配置
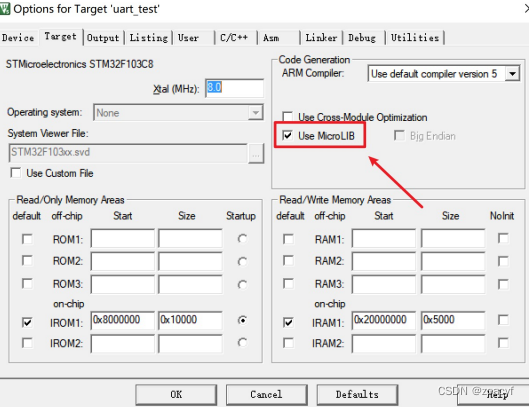
从魔术棒打开,这个勾勾一定要打上,否则 printf 无法重映射
部分实现代码
#include <stdio.h>
#include <string.h>
unsigned char ch[20] = {0};
int fputc(int ch, FILE *f)//方便printf打印
{
unsigned char temp[1]={ch};
HAL_UART_Transmit(&huart1,temp,1,0xffff);
return ch;
}
main函数里:
unsigned char ch[20] = {0};
HAL_UART_Transmit(&huart1, "hello world\n", strlen("hello world\n"), 100);
while(1)
{
HAL_UART_Receive(&huart1, ch, 19, 100);
//HAL_UART_Transmit(&huart1, ch, strlen(ch), 100);
printf(ch);
memset(ch, 0, strlen(ch));
}串口实验(中断)串口配置
串口配置: 前4步同上

编程实现
#include <stdio.h>
//串口接收缓存(1字节)
uint8_t buf=0;
//定义最大接收字节数 200,可根据需求调整
#define UART1_REC_LEN 200
// 接收缓冲, 串口接收到的数据放在这个数组里,最大UART1_REC_LEN个字节
uint8_t UART1_RX_Buffer[UART1_REC_LEN];
// 接收状态
// bit15, 接收完成标志
// bit14, 接收到0x0d
// bit13~0, 接收到的有效字节数目
uint16_t UART1_RX_STA=0;
// 接收完成回调函数,收到一个数据后,在这里处理
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
// 判断中断是由哪个串口触发的
if(huart->Instance == USART1)
{
// 判断接收是否完成(UART1_RX_STA bit15 位是否为1)
if((UART1_RX_STA & 0x8000) == 0)
{
// 如果已经收到了 0x0d (回车),
if(UART1_RX_STA & 0x4000)
{
// 则接着判断是否收到 0x0a (换行)
if(buf == 0x0a)
// 如果 0x0a 和 0x0d 都收到,则将 bit15 位置为1
UART1_RX_STA |= 0x8000;
else
// 否则认为接收错误,重新开始
UART1_RX_STA = 0;
}
else // 如果没有收到了 0x0d (回车)
{
//则先判断收到的这个字符是否是 0x0d (回车)
if(buf == 0x0d)
{
// 是的话则将 bit14 位置为1
UART1_RX_STA |= 0x4000;
}
else
{
// 否则将接收到的数据保存在缓存数组里
UART1_RX_Buffer[UART1_RX_STA & 0X3FFF] = buf;
UART1_RX_STA++;
// 如果接收数据大于UART1_REC_LEN(200字节),则重新开始接收
if(UART1_RX_STA > UART1_REC_LEN - 1)
UART1_RX_STA = 0;
}
}
}
// 重新开启中断
HAL_UART_Receive_IT(&huart1, &buf, 1);
}
}
int fputc(int ch, FILE *f)
{
unsigned char temp[1]={ch};
HAL_UART_Transmit(&huart1,temp,1,0xffff);
return ch;
}
main函数部分
HAL_UART_Receive_IT(&huart1, &buf, 1);
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//判断判断串口是否接收完成
if(UART1_RX_STA & 0x8000)
{
printf("收到数据:");
// 将收到的数据发送到串口
HAL_UART_Transmit(&huart1, UART1_RX_Buffer, UART1_RX_STA & 0x3fff, 0xffff);
// 等待发送完成
while(huart1.gState != HAL_UART_STATE_READY);
printf("\r\n");
// 重新开始下一次接收
UART1_RX_STA = 0;
}
printf("hello zyf\r\n");
HAL_Delay(1000);
}