[入门必看]数据结构6.2:图的存储及基本操作
- 第六章 图
- 6.2 图的存储及基本操作
- 知识总览
- 6.2.1 邻接矩阵法
- 6.2.2 邻接表法
- 6.2.3+6.2.4 十字链表、邻接多重表
- 6.2.5 图的基本操作
- 6.2.1 邻接矩阵法
- 图的存储——邻接矩阵法
- 邻接矩阵法存储带权图(网)
- 邻接矩阵法的性能分析
- 邻接矩阵法的性质
- 6.2.2 邻接表法
- 邻接表法(顺序+链式存储)
- 6.2.3+6.2.4 十字链表、邻接多重表
- 十字链表存储有向图
- 十字链表法性能分析
- 邻接多重表存储无向图
- 6.2.5 图的基本操作
- Adjacent(G,x,y):判断图G是否存在边<x, y>或(x, y)
- Neighbors(G,x):列出图G中与结点x邻接的边
- InsertVertex(G,x):在图G中插入顶点x
- DeleteVertex(G,x):从图G中删除顶点x
- AddEdge(G,x,y):若无向边(x, y)或有向边<x, y>不存在,则向图G中添加该边
- RemoveEdge(G,x,y):若无向边(x, y)或有向边<x, y>存在,则从图G中删除该边
- FirstNeighbor(G,x):求图G中顶点x的第一个邻接点,若有则返回顶点号。若x没有邻接点或图中不存在x,则返回-1
- NextNeighbor(G,x,y):假设图G中顶点y是顶点x的一个邻接点,返回除y之外顶点x的下一个邻接点的顶点号,若y是x的最后一个邻接点,则返回-1
- Get_edge_value(G,x,y):获取图G中边(x, y)或<x, y>对应的权值。
- Set_edge_value(G,x,y,v):设置图G中边(x, y)或<x, y>对应的权值为v。
- 知识回顾与重要考点
- 6.2.1 邻接矩阵法
- 6.2.2 邻接表法
- 6.2.3+6.2.4 十字链表、邻接多重表
- 6.2.5 图的基本操作
第六章 图
小题考频:33
大题考频:11
6.2 图的存储及基本操作
难度:☆☆☆☆
知识总览
6.2.1 邻接矩阵法

6.2.2 邻接表法

6.2.3+6.2.4 十字链表、邻接多重表

6.2.5 图的基本操作

6.2.1 邻接矩阵法

图的存储——邻接矩阵法

1表示两个顶点相互邻接
0表示两个顶点相互不邻接
实现:

定义一个一维数组存放各个顶点的信息。
——用char类型可以放置更复杂的数据。
用二维数组表示各个边的信息。
——因为此处边只有0和1两种状态,可以使用空间更小的bool类型或者枚举类型。
(int型变量可能会占4B或8B,而bool类型或者枚举类型只占1B)
各个结点的数据在数组中有一个具体的编号,Eg.A-0、B-1、C-2……
利用结点在数组中的下标和邻接矩阵里行和列进行对应。

如果矩阵中某一个元素为1,意味着与之对应的边或弧存在,为0则不存在。

无向图:
第i个结点的度=第i行(或第i列)的非零元素个
操作复杂度为 O ( n ) O(n) O(n)
Eg. 要求结点B的度,检查和B对应的这一行,总共有几个非0元素。
可以看到有3个,所以B的度就应该是3。
有向图:
第i个结点的出度=第i行的非零元素个数
第i个结点的入度=第i列的非零元素个数
第i个结点的度=第i行、第i列的非零元素个数之和
邻接矩阵法存储带权图(网)

带权图:在对应的位置写上两个顶点之间对应的权值。
如果两个顶点之间不存在边,用无穷表示。
可以定义一个常量INFINITY,取int值的最大值来表示无穷
边的权值可以根据场景改为其他类型

有时带权图中,会把自己指向自己的这条边的权值设为0
在带权图中,如果一条边是无∞或0,则表示与之对应的两个顶点之间不存在边
邻接矩阵法的性能分析
空间复杂度:
O
(
∣
V
∣
2
)
O(|V|^2)
O(∣V∣2)——只和顶点数相关,和实际的边数无关
适合用于存储稠密图
如果一个图中顶点数很多,边数很少,那么邻接矩阵中会有很多空间被浪费。
无向图的邻接矩阵是对称矩阵,可以压缩存储(只存储上三角区/下三角区)
回顾:对称矩阵的压缩存储

邻接矩阵法的性质
——此处讨论的为不带权图

设图G的邻接矩阵为
A
A
A(矩阵元素为0/1),则
A
n
A^n
An的元素
A
n
[
i
]
[
j
]
A^n\left[ i \right] \left[ j \right]
An[i][j]等于由顶点
i
i
i到顶点
j
j
j的长度为
n
n
n的路径的数目
此处 A A A指的是整个邻接矩阵(右图),其中的某个元素表示由顶点 i i i到顶点 j j j的长度为 n n n的路径的数目。

如果两个矩阵相乘的意义是什么?
Eg. A 2 [ 1 ] [ 4 ] A^2\left[ 1 \right] \left[ 4 \right] A2[1][4]:第一行和第四列分别相乘相加(式1)
现实意义:
Eg1. 如乘式中的元素 a 1 , 2 a_{1,2} a1,2为1,意义是结点A到结点B之间有一条边;
与之相乘的元素 a 2 , 4 a_{2,4} a2,4为1,意义是结点B到结点D之间有一条边;
相乘值为1,意义是存在1条可以从A到B到D的路径。
Eg2. 乘式中 a 1 , 3 a_{1,3} a1,3为0,表示从A到C没有路径;
a 3 , 4 a_{3,4} a3,4为0,表示从C到D没有路径;
相乘值为0,那么表示从A到C到D的路径就不存在
所以整个
A
2
[
1
]
[
4
]
=
1
A^2\left[ 1 \right] \left[ 4 \right] = 1
A2[1][4]=1的意义为,从结点A到结点D,只有1条长度为2的路径【A-B-D】

类似,
A
2
[
2
]
[
2
]
=
3
A^2\left[ 2 \right] \left[ 2 \right] = 3
A2[2][2]=3,B到B有3条长度2的路径【BAB、BCB、BDB】

其余分析方法同上。
该矩阵 A 2 A^2 A2的含义为:矩阵中对应的两个结点之间长度为2的路径有多少条

三次方含义类似。
即对应结点之间长度为3的路径有多少条。
更严谨的证明方法详见离散数学图论部分。
6.2.2 邻接表法

邻接矩阵(顺序存储)的缺点是:空间复杂度高,为
O
(
n
2
)
O(n^2)
O(n2),不适合存储稀疏图。
邻接表法(顺序+链式存储)

用一个一位数组存储各个顶点信息:数据域,指向该顶点的第一条边/弧的指针
声明图时,声明顶点结点的一个数组,记录图中共有多少结点、多少边/弧。
对于各边/弧,也有一个与之对应的结点,int adjvex指明了当前这条边/弧指向哪个结点。
——Eg. 如图:AB相连,B的编号为1,所以A之后有一条指向1(结点B)的边,同时也有指向2(结点C)、3(结点D)的边
如果存储带权图,也可以在和边相关的这个顶点中加入权值信息。

对比:树的孩子表示法

邻接表法与树的孩子表示法是相似的
也可以用邻接表法存储有向图:

无向图中,两个相邻的结点会有相同的边。
所以无向图中,边的数据存在冗余:边
结点的数量是 2 ∣ E ∣ 2|E| 2∣E∣,整体空间复杂度为 O ( ∣ V ∣ + 2 ∣ E ∣ ) O(|V| + 2|E|) O(∣V∣+2∣E∣)
有向图中每个结点后的信息表示:从该结点往外射的一条弧
边结点的数量是 ∣ E ∣ |E| ∣E∣,整体空间复杂度为 O ( ∣ V ∣ + ∣ E ∣ ) O(|V| + |E|) O(∣V∣+∣E∣)

无向图的度:遍历和结点相关的边链表,有多少边,度就是多少。
遍历边链表也可以找到该结点相连的所有边。
有向图的度:入度加上出度
出度:遍历和结点相关的边链表,有多少弧,度就是多少。
入度:唯一的办法就是把所有结点的边列表遍历一次,找指向那个结点的弧的数量
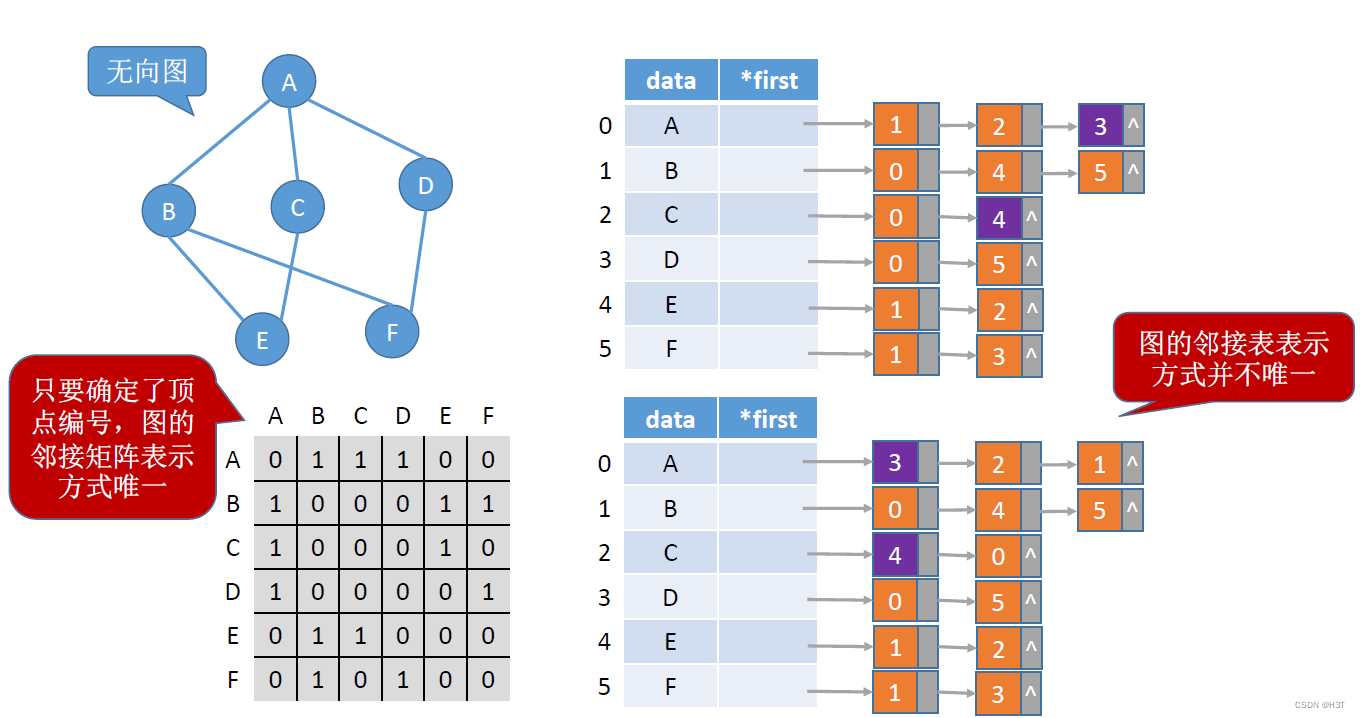
对于一个邻接表,表示方式不唯一。
边在链表中出现的先后顺序是任意的。
而邻接矩阵的表示方式是唯一的!
总结:
6.2.3+6.2.4 十字链表、邻接多重表

邻接矩阵、邻接表存储有向图都有所不便:

十字链表存储有向图

每一个结点对应一个编号.
十字链表法存储图,定义两个结构体:顶点结点和弧结点
图中顶点结点处的绿色箭头代表该顶点作为弧尾的第一条弧,弧结点的绿色箭头代表弧尾相同的下一条弧
Eg. ①0指向1 A->B ②0指向2 A->C
可以找到所有从当前顶点往外发射的弧
图中顶点结点处的橙色箭头代表该顶点作为弧头的第一条弧,弧结点的橙色箭头代表弧头相同的下一条弧
Eg. ①2指向0 C->A ②3指向0 D->A
可以找到所有指向当前结点的弧
十字链表法找出和入都很方便!
十字链表法性能分析

空间复杂度为 O ( ∣ V ∣ + ∣ E ∣ ) O(|V|+|E|) O(∣V∣+∣E∣),和邻接表同样优秀
如何找到指定顶点的所有出边?——顺着绿色线路找
如何找到指定顶点的所有入边?——顺着橙色线路找
注意:十字链表只用于存储有向图
对无向图的存储能否优化?

邻接矩阵:空间复杂度高
邻接表:数据冗余
邻接多重表存储无向图

看图,与十字链表相似
可以定义顶点结点、边结点结构体。
顶点结点:用数组的形式来顺序存储顶点信息。
顶点结点指针:指向和当前顶点相连的第一条边。
边结点:顺着iLink指针往下找,可以找到与当前顶点相连的下一条边。接下来没有更多边与当前顶点相连了,iLink指向NULL。
不用维护两份冗余数据,在删除结点和边的时候操作更方便。
- 删除边:

删除边AB:
需要修改两个指针:让两个节点的指针指向后一条边
- 删顶点:

删除顶点E:
除了删除顶点本身的信息之外,还需要删除和顶点相连的所有边的信息。
并修改指针的值。
更好的空间复杂度,没有冗余边。
删除边、节点都方便。
注意:只适用于存储无向图。
6.2.5 图的基本操作


Adjacent(G,x,y):判断图G是否存在边<x, y>或(x, y)


<>表示有向边(弧);()表示无向边
Neighbors(G,x):列出图G中与结点x邻接的边


InsertVertex(G,x):在图G中插入顶点x

DeleteVertex(G,x):从图G中删除顶点x



AddEdge(G,x,y):若无向边(x, y)或有向边<x, y>不存在,则向图G中添加该边

RemoveEdge(G,x,y):若无向边(x, y)或有向边<x, y>存在,则从图G中删除该边

FirstNeighbor(G,x):求图G中顶点x的第一个邻接点,若有则返回顶点号。若x没有邻接点或图中不存在x,则返回-1


NextNeighbor(G,x,y):假设图G中顶点y是顶点x的一个邻接点,返回除y之外顶点x的下一个邻接点的顶点号,若y是x的最后一个邻接点,则返回-1

Get_edge_value(G,x,y):获取图G中边(x, y)或<x, y>对应的权值。
Set_edge_value(G,x,y,v):设置图G中边(x, y)或<x, y>对应的权值为v。

知识回顾与重要考点
6.2.1 邻接矩阵法

邻接矩阵法要点回顾:
- 如何计算指定顶点的度、入度、出度(分无向图、有向图来考虑)?时间复杂度如何?
- 如何找到与顶点相邻的边(入边、出边)?时间复杂度如何?
- 如何存储带权图?
- 空间复杂度—— O ( ∣ V ∣ 2 ) O(|V|^2) O(∣V∣2),适合存储稠密图
- 无向图的邻接矩阵为对称矩阵,如何压缩存储?
- 设图G的邻接矩阵为A(矩阵元素为0/1),则An的元素An[i][j]等于由顶点i到顶点j的长度为n的路径的数目
6.2.2 邻接表法

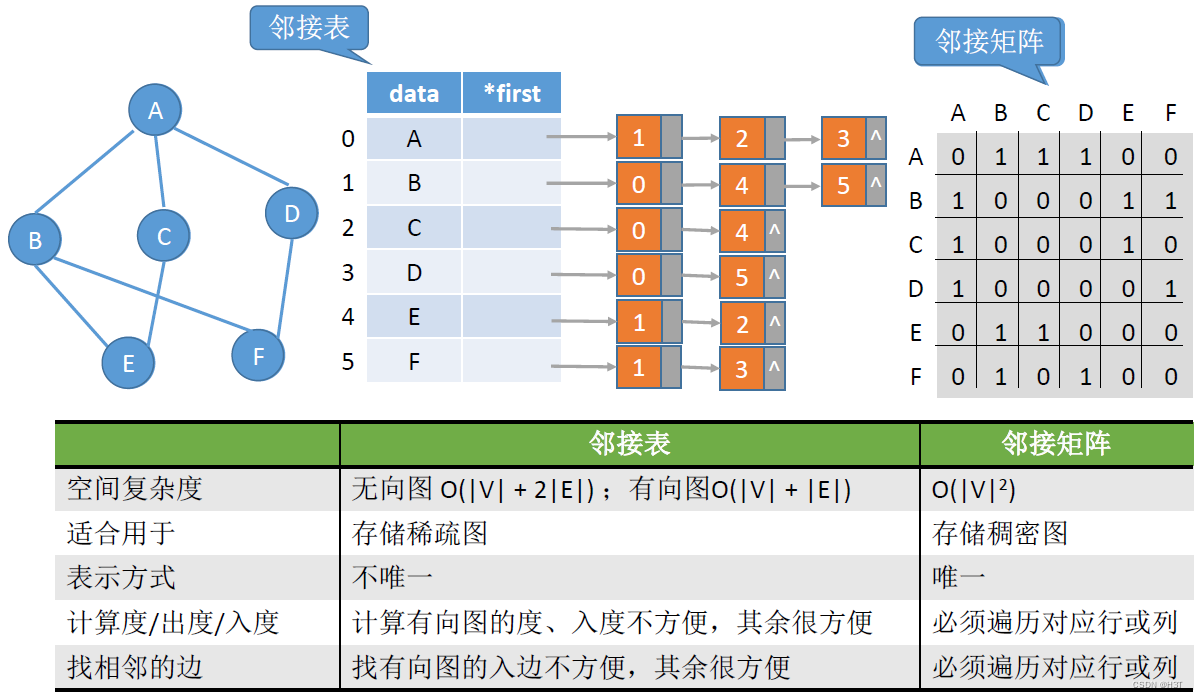
- 空间复杂度:邻接表空间复杂度低【适合存储稀疏图】;邻接矩阵时间复杂度高【适合存储稠密度】
- 表示方式:邻接表表示方式不唯一;邻接矩阵表示方式唯一‘
- 计算度/入度/出度:邻接表计算有向图的度、入度不方便;邻接矩阵必须遍历对应行或列
- 找相邻边:邻接表找有向图的入边不方便;邻接矩阵必须遍历对应行或列
6.2.3+6.2.4 十字链表、邻接多重表

- 理解特性。
- 十字链表只能存有向图
- 邻接多重表只能存无向图
6.2.5 图的基本操作