从零开始学习自动驾驶决策规划
从入门到掌握的一系列讲解,其中涵盖的内容如下:
前言课
第一节-ros工程的创建
第一节-运行环境和工程目录简介
第二节-工程运行和小车模型搭建简介
第二节-车辆里程计
第三节-整体架构思路
第三节-地图路线构建方法
第三节-参考线平滑函数
第三节-参考线平滑原理(一)
第三节-参考线平滑原理(二)
第四节-lqr控制器、pid控制器、stanley控制器、pure_pursuit控制器代码简介
第五节-局部规划器代码简介
第五节-Frenet坐标系和参考线参数计算
第六节-模拟障碍物的生成函数介绍
第六节-模拟障碍物的生成方法介绍
第六节-障碍物函数类的介绍
第七节-基于Frenet采样规划原理(一)
第七节-基于Frenet采样规划原理(二)
第七节-基于Frenet采样规划原理(三)
第七节-基于Frenet采样规划总结
第七节-基于Frenet采样规划的补充-停止模式
第八节-Lattice规划算法-函数介绍(第八节-Lattice规划算法原理一)
第八节-Lattice规划算法-障碍物的SL图和ST图(一) (第八节-Lattice规划算法原理二-障碍物的SL图和ST图)
第八节-Lattice规划算法-障碍物的SL图和ST图(二) (第八节-Lattice规划算法原理三-障碍物的SL图和ST图)
第八节-Lattice规划算法-巡航模式的速度采样 (第八节-Lattice规划算法原理四-巡航模式的速度采样)
第八节-Lattice规划算法-超车和跟车速度采样(一) (第八节-Lattice规划算法原理五-超车和跟车速度采样)
第八节-Lattice规划算法-超车和跟车速度采样(二) (第八节-Lattice规划算法原理六)
第八节-Lattice规划算法-横向采样与二次规划 (第八节-Lattice规划算法原理七-横向采样与二次规划)
第八节-Lattice规划算法-二次规划(一) (第八节-Lattice规划算法原理八-二次规划)
第八节-Lattice规划算法-二次规划(二) (第八节-Lattice规划算法原理九-二次规划)
第八节-Lattice规划算法-二次规划(三) (第八节-Lattice规划算法原理十-二次规划)
第八节-Lattice规划算法一-代价函数 (第八节-Lattice规划算法原理十一-代价函数)
第八节-Lattice规划算法-合成函数和碰撞检测 (第八节-Lattice规划算法原理十二-合成函数和碰撞检测)
第八节-Lattice规划算法效果演示 (第八节-Lattice规划算法效果演示)
第九节-Em规划算法-函数介绍
第九节-Em规划算法-路径规划DP介绍
第九节-Em规划算法-路径规划QP函数介绍
第九节-Em规划算法-路径规划QP原理和效果显示
第九节-Em规划算法-速度规划DP介绍
第九节-Em规划算法-速度规划QP介绍
第九节-Em规划算法-效果演示
第十节-混合A星算法(一)
第十节-混合A星算法(二)
第十节-混合A星算法(三)
第十节-混合A星算法(四)
第十节-混合A星算法(五)
第十节-混合A星算法效果演示
第十一节-变道规划算法-变道算法介绍
第十一节-变道规划算法-Lattice超车和跟车效果演示
第十一节-变道规划算法-变道算法决策过程(一)
第十一节-变道规划算法-变道算法决策过程(二)
第十一节-变道规划算法-效果演示
第十二节-open planner规划算法-介绍
第十二节-open planner规划算法-效果演示
第十三节-carla-ros联合仿真-carla介绍与版本选择
第十三节-carla-ros联合仿真-carla环境配置与运行
第十三节-carla-ros联合仿真-PythonAPI例子介绍
第十三节-carla-ros联合仿真-PythonAPI应用示例
第十三节-carla-ros联合仿真-ros-bridge的介绍
第十三节-carla-ros联合仿真-ros-bridge的使用
第十三节-carla-ros联合仿真-ros-bridge的代码讲解
第十三节-carla-ros联合仿真-ros-bridge的坑
第十三节-carla-ros联合仿真-ros-bridge的演示
第十三节-carla-ros联合仿真-切回ros单独仿真
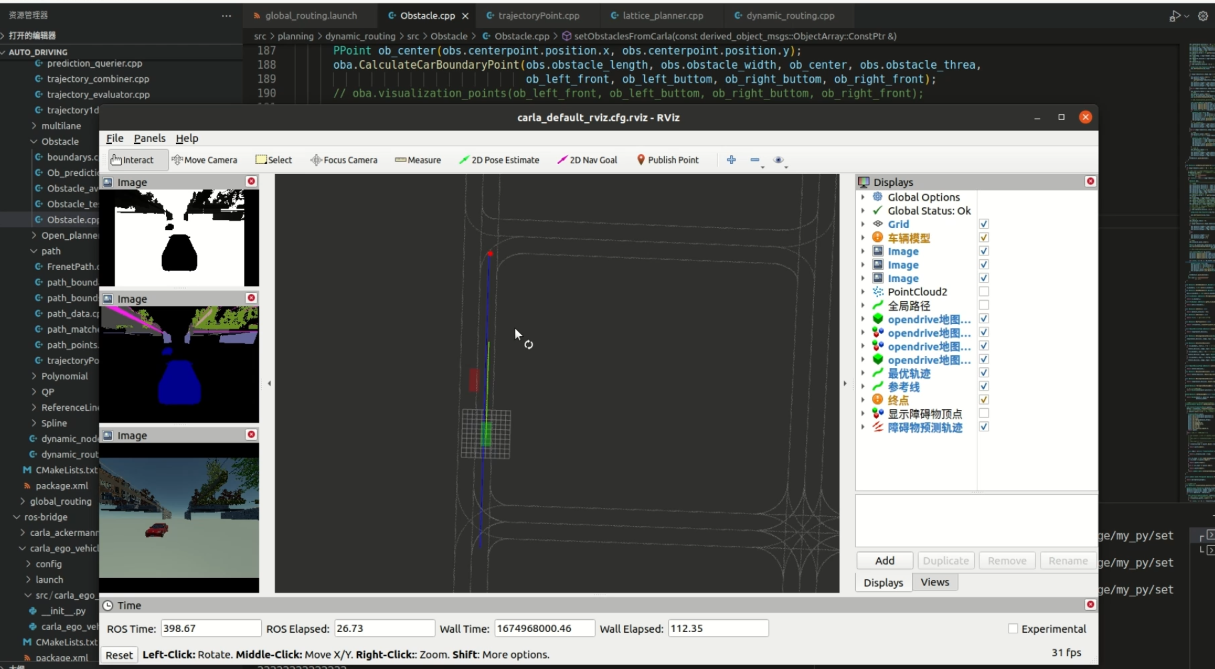
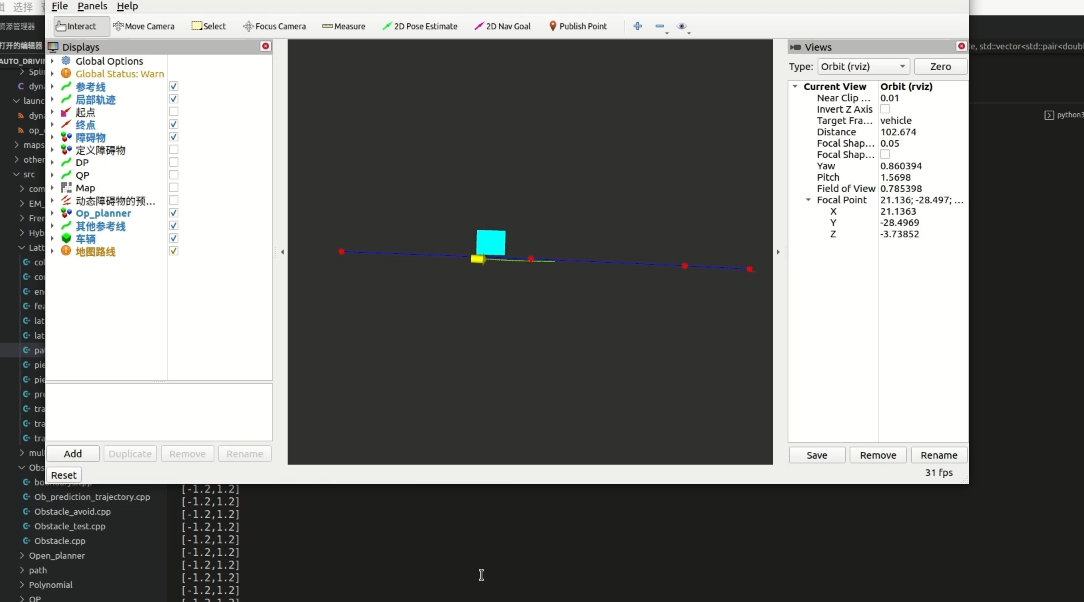
carla-ros联合仿真-避开静态障碍物
carla-ros联合仿真-跟随动态障碍物
其中涉及的算法和仿真平台一目了然,希望可以集合各位学习研究自动驾驶的小伙伴们一起交流。
需要了解具体可私信。









![[软件工具]姓氏谐音梗随机生成工具使用教程](https://i0.hdslb.com/bfs/archive/1373a7c71fa54b2707f9b430c59a36d597059301.jpg@100w_100h_1c.png@57w_57h_1c.png)