我使用的机器人型号为EPSON LS3-4013,在本文中记录了机械臂控制器和电脑连接,及电脑程序控制机械臂的完整流程。
1 USB连接电脑和机械臂
将USB连接电脑和控制器的PC插口。在EPSON RC+ 软件中选择 设置->电脑和控制器通信。其中默认包括USB通信,点击连接即可将电脑和控制器连接
控制器除了支持USB连接,还支持多种其他连接方式,如以太网连接(具体可见附赠的说明书)。我本人尝试以太网连接时一直没成功,于是就一直用USB了
2 故障排查:
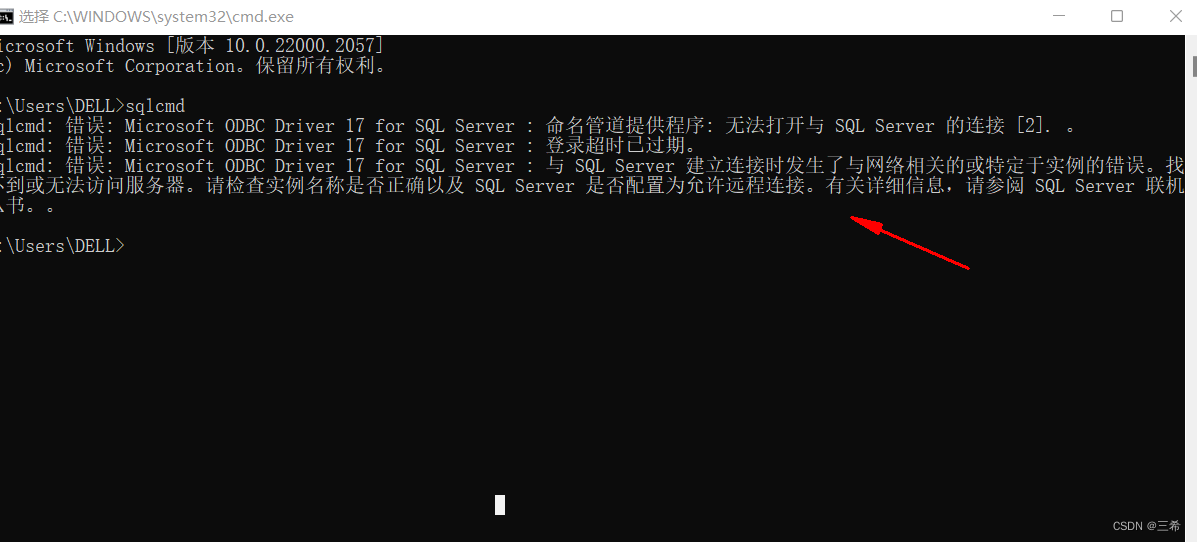
在连接好后出现了以下报错,我截图了说明书里对该报错的解释

经过检查,我这里出现的问题是电机内部电池没电了。更换电机电池后,进行以下操作:
1 工具->命令窗口,打开命令行
输入: encreset 1,2,3,4
重置编码器,后面的数字代表了要重置的机械臂关节。这里我对1,2,3,4所有关节进行重置
2 工具->控制器 选择重置控制器,重启控制器以保存配置
3 校准机器人零点位置
在重新启动电机后,需要对机器人进行零点校准。零点校准步骤如下:
在机器人管理器中,启动电机,并解除所有轴的锁定。此时即可手动将机器人校准
1 机器人第一关节(X)对准底座正后方螺丝

2 机器人第二关节(Y)对准底座上凹槽

3 机器人第三关节(Z)位于机器人地盘上方75mm处,误差在2mm左右内可以。移动Z轴时需要按住解除锁定开关
4 机器人第四关节(U)对准转轴上方的标识

校准完成后,在命令行输入
calpIs 0, 0, 0, 0
calib 1, 2,3, 4
保存校准
4 机器人编程
EPSON机械臂编程使用SPEL+语言。在编译器的说明文段里有完整的关于语言语法和机器人API的说明。这里我们实现一个简单的机器人在多点之间移动的程序。
机器人示教:
机器人示教即为手动设置机器人要移动的目标点,在机器人管理器->步进示教可以打开示教界面
(办公室电脑没有联网,没法发送截图,这里只能拍照)

在打开电机后,在示教界面就可以手动控制机器人各轴的运动。这里建议运动距离在长距离到短距离直接选择,连续动作很容易超出机器人关节运动范围。在范围栏目中可以手动调整机器人各轴的最大移动范围。将机械臂移动到目标点后即可保持该点。点数据默认保存在robot1.pts点数据文件里。我们也可以手动修改点数据文件来设置示教点
在示例中我们保存了点P0, P1, P2,在下面程序中我们实现了机器人在各点间做JUMP运动(在移动过程中抬起Z轴)
FUNCTION main
If MOTOR = Off Then MOTOR On
Call MoveRobot
Fend
Function MoveRobot
Do
Jump P0
Jump P1
Jump P2
Loop
Fend
程序解读:
上传程序后,机器人会调用程序中的main方法。这里在main方法第一句中我们在电机关闭时打开电机,并调用MoveRobot方法。
在MoveRobot方法中机器人循环在三个点之间移动
)