一、前言
此示例演示如何将鱼眼相机模型转换为针孔模型,并构建相应的单目相机传感器仿真。
要模拟安装在车辆中的单目摄像头传感器,请执行以下步骤:
-
通过使用棋盘格校准相机来估计固有的相机参数。内在参数描述了鱼眼镜头相机本身的特性。
-
通过使用上一步中的相同棋盘格再次校准相机来估计外部相机参数。外部参数描述了鱼眼镜头摄像机在车辆坐标系中的安装位置。
-
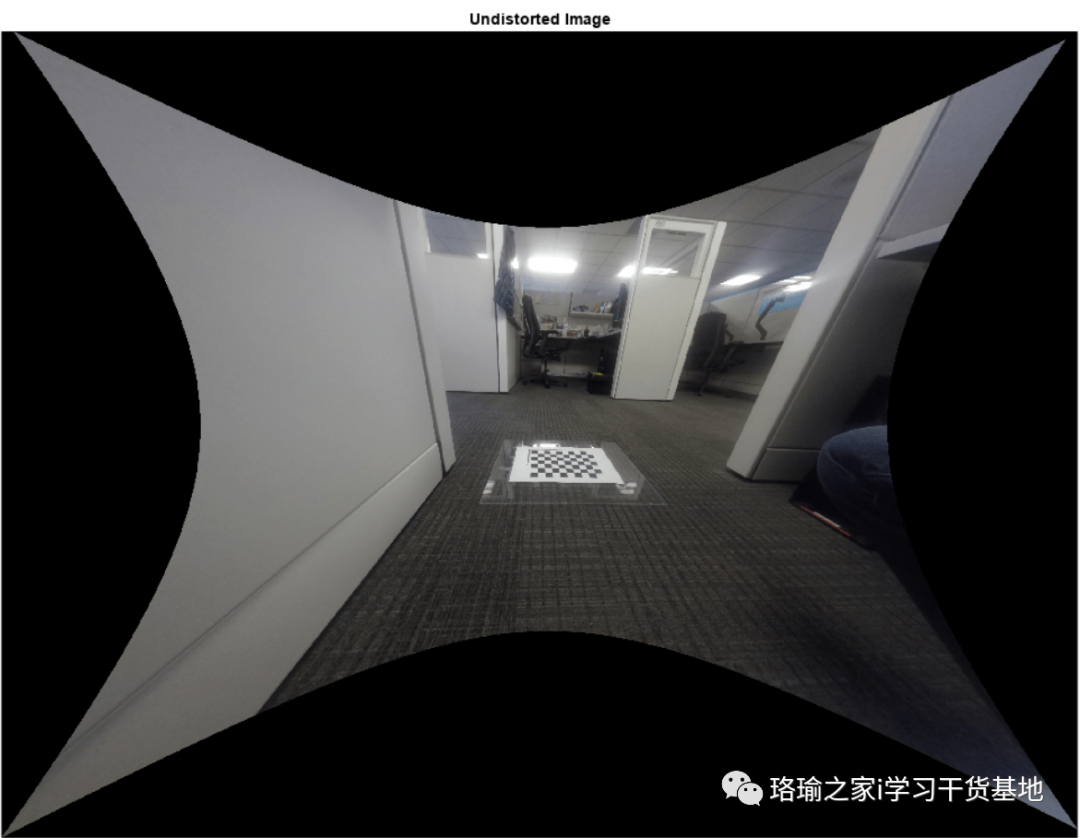
通过将鱼眼相机内联函数转换为针孔摄像机内联函数来消除图像失真。这些内在描述了一种合成针孔相机,可以假设生成未失真的图像。
-
使用固有针孔相机参数和外部参数配置单目相机传感器以进行仿真。然后,您可以使用此传感器检测物体和车道边界。
二、估计鱼眼相机内在因素
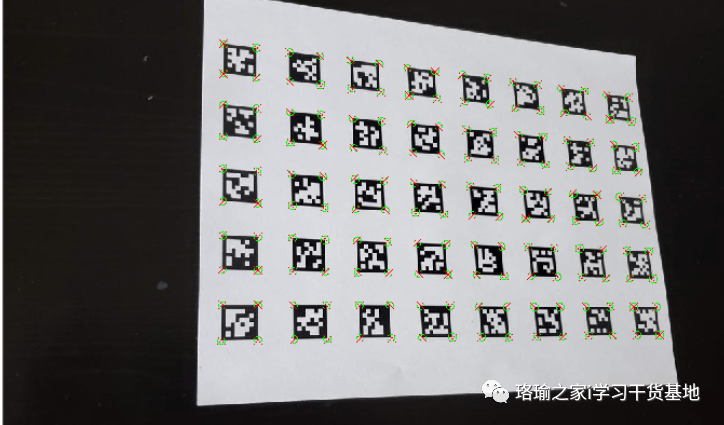
要估计固有参数,请使用棋盘格进行相机校准。或者,为了更好地可视化结果,请使用相机校准器应用程序。对于鱼眼镜头相机,将棋盘格靠近相机放置很有用,以便捕捉图像中较大的明显失真。
三、估计鱼眼镜头相机外在函数
要估计外部参数,请使用相同的棋盘格来估计摄像机在车辆坐标系中的安装位置。以下步骤估计一个图像中的参数。您还可以拍摄多个棋盘格图像以获得多个估计值,并对结果求平均值。

四、为未失真的图像构建合成针孔相机
五、鸟瞰图
现在,可以通过绘制鸟瞰图来验证单摄像头。
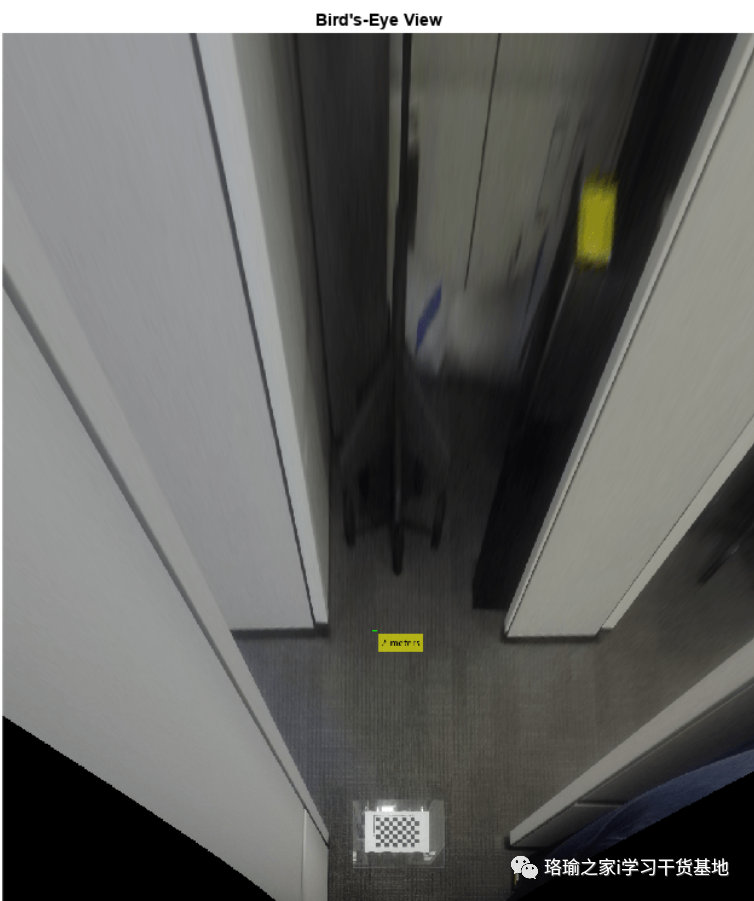
上图显示相机测量距离准确。现在,您可以使用单眼摄像头进行物体和车道边界检测。
六、程序
使用Matlab R2022b版本,点击打开。(版本过低,运行该程序可能会报错)
程序有偿获取:评论区下留言,博主看到会私信你。










![[攻防世界] [RE] [APK] app2](https://img-blog.csdnimg.cn/d16d763b4bd94ebe8d699ddb7504e53c.png)