经典假设
1、左右视图成功匹配的窗口,具有相同的像素
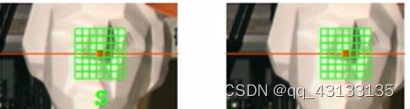
这个是最经典的假设,几乎所有视差图计算都用上了他,通过匹配左右窗口像素,得到最佳匹配对应的x轴坐标差,就是视差
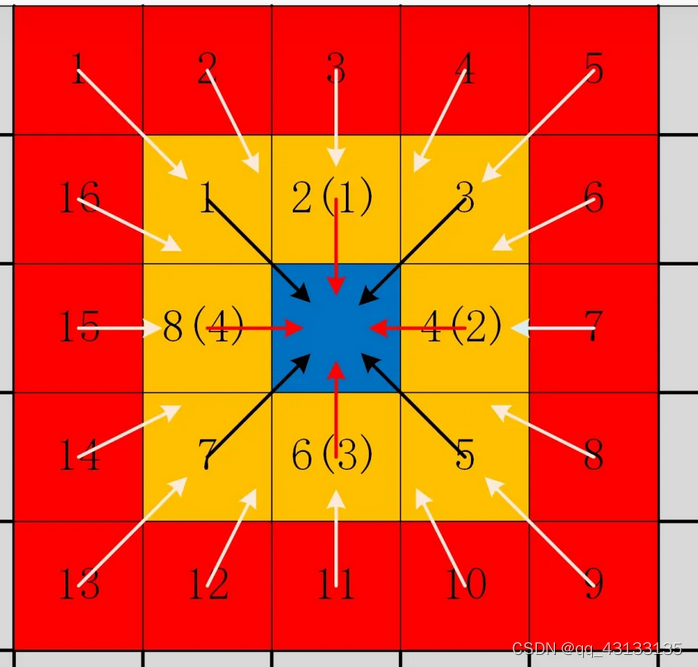
2、像素P的视差只与其领域有关
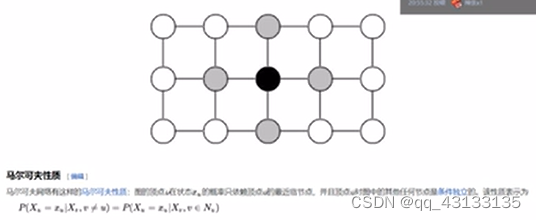
这个是基于马尔可夫性质,做代价聚合的时候,基于这个假设就用周围的像素视差对中间的视差进行聚合。
3、相近颜色的点具有相近的视差

如果一个平面只采集到几个有效视差,就可以基于这个假设,拟合一个平面去确定其他位置的视差。
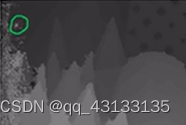
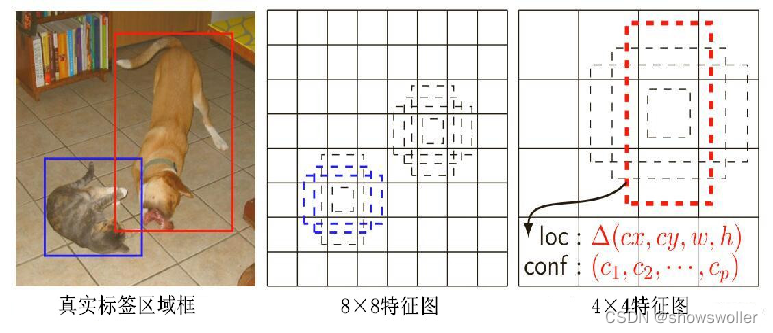
4、视差非连续区,应具有颜色差或亮度差
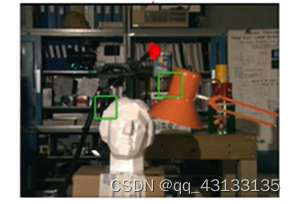
如上图的边界区,就是视差不连续的
上述这些假设都作为各类算法的切入点,详细可以观看 立体匹配理论与实战
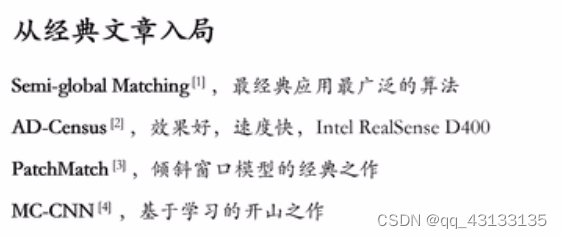
立体匹配
一般分为四种:局部、全局、半全局、基于深度学习的匹配,前三种都是传统的算法。
代价计算
如经典的SDA匹配,使用左视图的窗口减去右视图的窗口,得到SDA值最小很可能就是真实视差。不过这样计算出来的一般都比较粗糙,我们一般只用来做初始代价计算,然后得到DSI(视差空间影像),这是一个三维数组(尺寸是w×h×d),其深度d代表视差,我们在每个候选视差位置计算得到的代价就填入该数组(可以用于后续的代价聚合):

代价聚合
就是用周围像素的代价聚合到中间去,方法很多,什么双边滤波,置信权重,交叉线,扫描线等等。像SGM之类的就用来这个,效果不错。
视差估计
聚合完用赢家通吃,得到最佳视差。当然如果直接用全局视差估计方法,比如图割,则不需要进行聚合,DSI计算完直接进行图割即可,不过全局方法会比较慢就是了。
视差优化
比如左右一致性检查的话,分别求出左右图像的视差,若同一个目标位置视差不一致则剔除。
再比如小连通域剔除,比如有一些散落的小白点,可以通过这个方法剔除这种错误
最后可以用平滑滤波,中值滤波这种去一下噪声。
结尾












![[附源码]Python计算机毕业设计Django在线图书销售系统](https://img-blog.csdnimg.cn/a0839601941e431fa30505e675ed36e0.png)