1.通用定时器PWM概述:
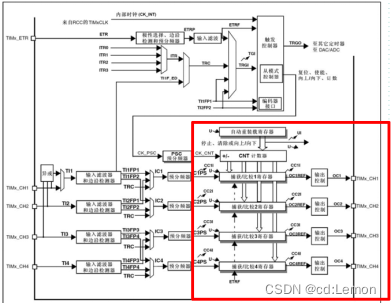
2.PWM工作过程:
2.PWM模式1&PWM模式2:
3.向上计数配置:
4.PWM模式:
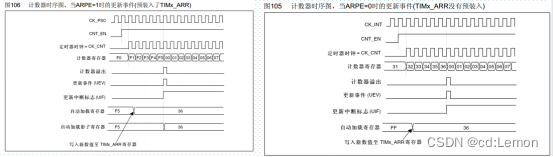
5.自动重载的预装载寄存器:
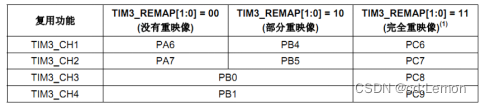
6.STM32定时器3输出通道引脚:
7.PWM输出库函数:
PWM输出参数初始化:void TIM_OCxInit(TIM_TypeDef* TIMx,TIM_OCInitTypeDef* TIM_OCInitStruct); 设置比较值函数:void TIM_OC2PreloadConfig(TIM_TypeDef* TIMx,uint16_t TIM_OCPreload); 使能自动重装载的预装载寄存器允许位:void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx,FunctionalState NewState); 8.PWM输出配置步骤:
使能定时器3时钟:RCC_APB1PeriphClockCmd(); 使能GPIO时钟:RCC_APB2PeriphClockCmd(); 初始化IO口为复用功能输出:GPIO_Init(); 使用PB5用作定时器的PWM输出引脚,因此需要开启AFIO复用时钟和设置重映射: ①AFIO复用时钟:RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); ②设置重映射:GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3,ENABLE); 初始化定时器,ARR和PSC等:TIM_TimeBaseInit(); 初始化输出比较参数:TIM_OC2Init(); 使能预装载寄存器:TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable); 使能定时器:TIM_Cmd(); 不断改变比较值CCRx,达到不同的占空比效果:TIM_SetCompare2(); 9.PWM输出总结:
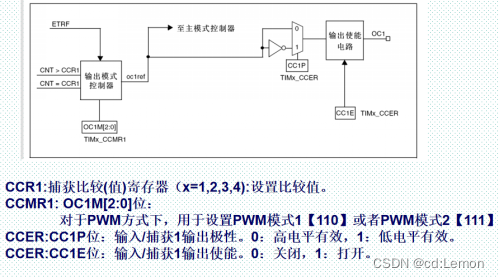
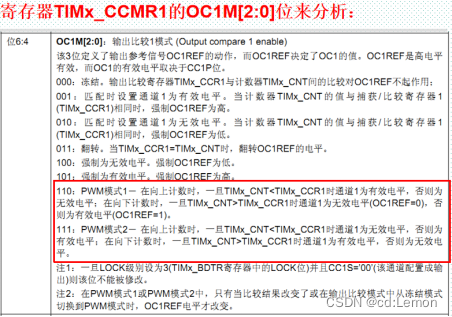
对于PWM输出,先进行比较,然后再控制输出; 110:①向上计数->(计数器值>设定值,为0;计数器值<设定值,为1); ②向下计数->(计数器值>设定值,为0;计数器值<设定值,为1); 111:①向上计数->(计数器值>设定值,为1;计数器值<设定值,为0); ②向下计数->(计数器值>设定值,为1;计数器值<设定值,为0); CCER:CC1P->设置为0:高电平有效;设置为1:低电平有效; CCER:CC1E->设置为0:关闭;设置为1:打开; 除了基本定时器TIM6和TIM7之外的其他定时器都是可以用来产生PWM输出的,高级定时器TIM1和TIM8可以同时产生多达7路额PWM的输出,通用定时器可以同时产生多达4路的PWM输出; 10.PWM输出实验-呼吸灯:
使用定时器3的PWM功能,输出占空比可变的PWM波,用来驱动LED灯,从而达到LED(PB5)亮度由亮变暗,又由暗变亮,如此循环:
(1)主函数:
#include "delay.h"
#include "led.h"
#include "pwmout.h"
/*
注意:
定时器3挂载在APB总线上为72MHz;(72-1)是因为分频器会自动加一,则为72/72=1MHz,1MHz=1us;
1*500=500us=0.5ms
*/
int main(){
u8 flag=0; //设置标志位
u16 i=0; //计数
delay_init(); //延时初始化
LED_Init(); //LED初始化
TIM3_CH_PWM_Init(500,72-1); //定时器3通道2初始化
while(1){
if(flag==0)
{
i++;
if(i==200)
{
flag=1; //设置标志
}
}
else if(flag==1)
{
i--;
if(i==0)
{
flag=0; //设置标志
}
}
TIM_SetCompare2(TIM3,i); //修改占空比
delay_ms(20);
}
}
(2)头文件:
#ifndef __PWMOUT_H
#define __PWMOUT_H
typedef unsigned char u8;
typedef unsigned short u16;
typedef unsigned int u32;
void TIM3_CH_PWM_Init(u16 arr,u16 psc); //PWM输出初始化
#endif
(3)PWM输出功能初始化:
#include "stm32f10x.h"
#include "pwmout.h"
/*
功能:定时器3PWM(PB5)输出的初始化
变量:arr:计数周期 psc:预分频值
*/
void TIM3_CH_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStruct;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
//1.使能GPIO时钟和定时器3时钟,复用时钟;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_AFIO,ENABLE);
//2.初始化IO口;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_5; //PB5
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; //输出速度
GPIO_Init(GPIOB,&GPIO_InitStruct);
//3.使用定时器3通道2,需要使用到重映射到PB5->部分重映射;
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3,ENABLE);
//4.初始化定时器3参数;
TIM_TimeBaseInitStruct.TIM_ClockDivision=TIM_CKD_DIV1; //1分频
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up; //计数模式->向上计数
TIM_TimeBaseInitStruct.TIM_Period=arr; //计数周期值
TIM_TimeBaseInitStruct.TIM_Prescaler=psc; //预分频系数
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStruct);
//5.初始化输出比较参数:
TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM1; //设置PWM输出模式->模式1(110)
TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_Low; //设置比较输出极性->这里是低电平有效
TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable; //设置输出使能
TIM_OC2Init(TIM3,&TIM_OCInitStruct);
//6.使能TIMx在CCRx上的预装载寄存器;
TIM_ARRPreloadConfig(TIM3,ENABLE);
//7.开启定时器;
TIM_Cmd(TIM3,ENABLE);
}