十五、机器人路径规划
15.1 机器人运动规划
机器人运动规划包含三个层次的内容:即路径规划、轨迹规划、轨迹跟踪或轨迹控制。路径规划是确定不含时间信息的几何路径。一般的工业机器人中都含有点到点,直线,圆弧及样条曲线等常用轨迹的路径规划。
TSP(旅行商)优化问题在机器人运动规划中得到许多应用。例如,移动机器人的全局路径规划问题,可转化为一种TSP问题。移动机器人在有障碍物的工作环境中工作时,通过优化,可寻找出一条从给定起始点到终止点的较优的运动路径,使移动机器人在运动过程中能安全、无碰撞地绕过所有的障碍物,且所走路径最短。TSP问题是一个组合优化问题,当数目很大时,常规方法求解计算量太大。对庞大的搜索空间中寻求最优解,使用遗传算法的搜索能力可以有效地解决这类问题。
15.2 基于神经网络的TSP问题优化
TSP问题是在一个城市集合中找出一个最短且经过每个城市各一次并回到起点的路径。为了将TSP问题映射为一个神经网络的动态过程,采取换位矩阵的表示方法,用矩阵表示商人访问
个城市。例如,有四个城市
,访问路线是
,则神经网路输出所代表的有效解用表1所示的二维矩阵来表示。
| 城市\次序 | 1 | 2 | 3 | 4 |
| 0 | 1 | 0 | 0 | |
| 0 | 0 | 0 | 1 | |
| 0 | 0 | 1 | 0 | |
| 1 | 0 | 0 | 0 |
上表中构成了一个的矩阵,该矩阵中,各行各列只能有一个元素为1,其余为0,否则是一个无效的路径。利用神经网络求解TSP问题的算法描述如下:
(1)置初值和权值;
(2)读入N个城市之间的距离d;
(3)神经网络输入;
(4)利用动态方程进行计算;
(5)根据一阶欧拉法计算;
(6)采用Sigmoid函数计算;
(7)计算能量函数;
(8)检查路径的合法性,判断迭代次数是否结束,如果结束,则终止,否则返回到第(4)步;
(9)输出迭代次数、最优路径、最优能量函数、路径长度及能量函数随时间的变化。
15.3 仿真实例
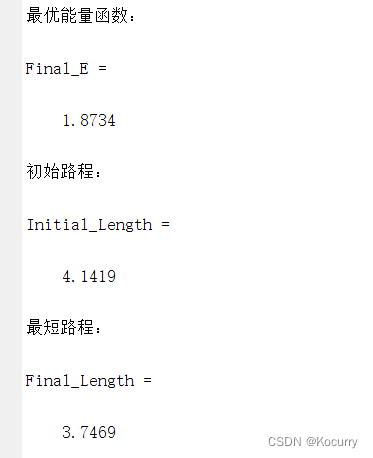
在TSP的神经网络能量函数式中,取A=B=1.5,D=1.0。城市的数量取8,其城市路径坐标保存在8.txt中。针对8个城市进行路径优化。采样时间取step=0.01,经过2000次迭代,最优能量函数为1.8734,初始路程为4.1419,最短路程为3.7469,如下图所示。
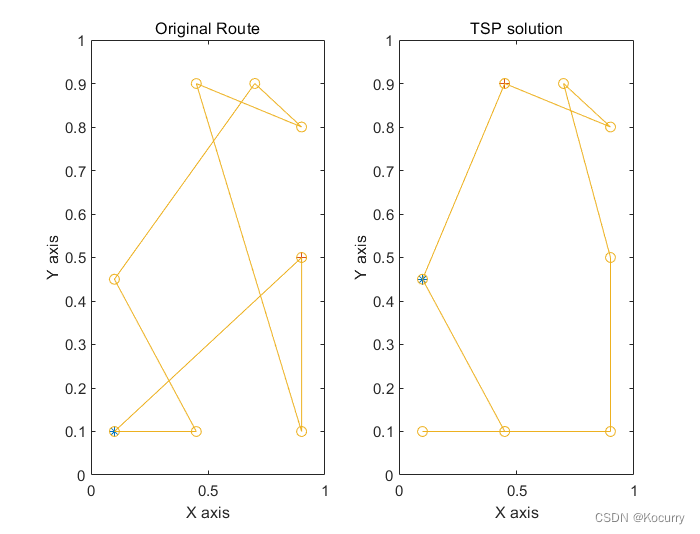
仿真结果如下图所示。左图为初始路径,右图为优化后的路径。
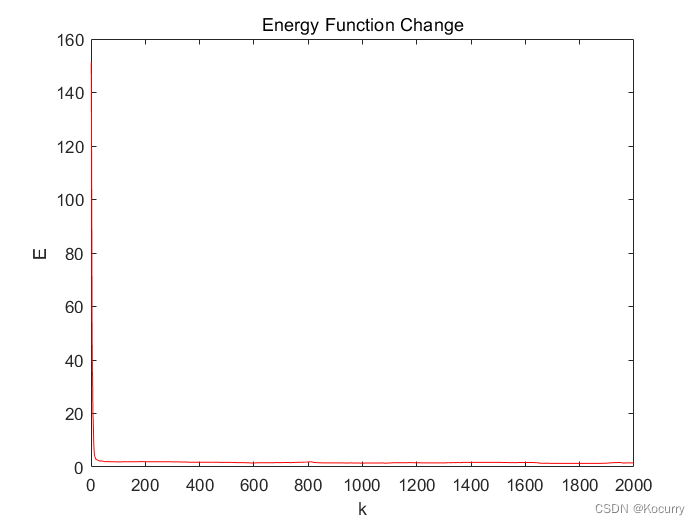
下图为能量函数随时间的变化过程。



![【VUE】Element UI 表单校验出现async-validator: [‘discipline is required‘]报错](https://img-blog.csdnimg.cn/706685eb09b94f4cba6c938e8a146d3d.png)