文章目录
前言
43.1 在哪里购买
43.2 连接和配置
43.3 任务期间的控制
43.4 视频
前言
Daiwa winch 是专门为无人机配送设计的高质量绞盘。该绞盘包括一个"线端检测开关",可防止将线拉得太紧,从而使设备拉伤或断线。绞盘包括一个弹簧装置,当包裹接触到地面时自动释放。

- 重量:630 克;
- 尺寸:宽:110mm 高:82mm 深:72mm;
- 最大有效载荷:8 公斤;
- 最大功率: 55W;
- 输入电压:7.2V ~ 22.2V;
- 接口:4xPWM 或 UART;
- 在日本设计和制造。
!Note
该绞盘的驱动程序将随 Copter-4.1.0 发布。对于早期版本,绞盘可以使用自动驾驶仪的伺服输出来控制,这使得绞盘可以从飞行员的发射器和/或 DO_SET_SERVO 任务命令中操作。
43.1 在哪里购买
这些绞盘是由 Okaya(japanese site,english site)制造的,可以在here (English)或here (Japanese)购买。
43.2 连接和配置
如下图所示,将绞盘连接到自动驾驶仪上。
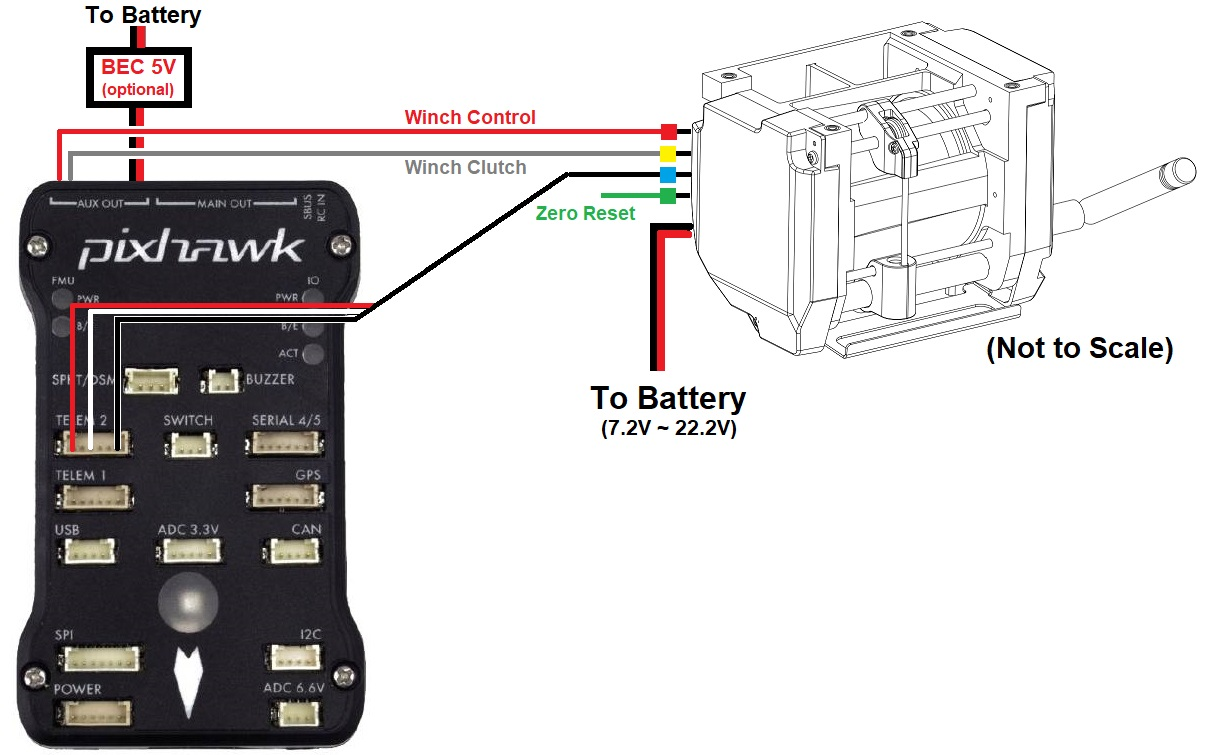
- 将 3pin 绞盘控制线(红色电缆带)连接到 AUX OUT 1(又名 Servo9);
- 将 3pin 绞盘离合器线(黄色电缆带)连接到 AUX OUT 2(又名 Servo10);
- 将 3pin 绞盘遥测线(蓝色电缆带)连接到自动驾驶仪的 Telem2(或任何其他遥测端口);
- 用于校准绞盘的"零点复位"(绿色电缆带)应保持断开状态;
- 需要一个 7.2V 至 22.2V 的电源来为电机供电;
- 一个 5V 的 BEC 可以选择连接到自动驾驶仪的伺服轨道上,为绞盘的电子装置提供电源。如果连接了遥测线,则不需要这样做。
设置以下参数:
- WINCH_TYPE = 2 (Daiwa);
- SERVO9_FUNCTION = 88 (Winch);
- SERVO9_MIN = 1000;
- SERVO9_TRIM = 1500;
- SERVO9_MAX = 2000;
- SERVO10_FUNCTION = 133 (Winch Clutch);
- SERVO10_MIN = 1000;
- SERVO10_TRIM = 1500;
- SERVO10_MAX = 2000;
- SERIAL2_PROTOCOL = 31 (Winch)。请注意,这是假设绞盘的遥测系统连接到 SERIAL2,在大多数板子上通常是 TELEM2。请注意,这并不一定对应于某些板子上的 UART2;
- SERIAL2_BAUD = 38 (38400 baud) or 115 (115200 baud), 取决于绞盘的版本;
- RC6_OPTION = 45 (Winch Control) 以允许从发射器的通道6旋钮控制绞盘速度;
- RC6_DZ = 30。这个死区是用来检测飞行员是否移动了绞盘控制旋钮,以从自主操作中重新获得控制权。
- RC6_TRIM = RC6_MIN 和 RC6_MAX 之间的中间值,通常接近 1500;
- RC8_OPTION = 44 (Winch Enable) 通过拉低发射器的通道8开关,允许放松绞盘。
43.3 任务期间的控制
绞盘可以在自主任务中使用 DO_WINCH 任务指令进行控制。