判断线段是否相交的办法(使用了向量叉积的方法):
首先,通过给定的线段端点坐标p1、p2、p3和p4构建了四个向量v1、v2、v3和v4:
v1表示从p1指向p2的向量,其分量为[p2[0] - p1[0], p2[1] - p1[1]]。
v2表示从p3指向p4的向量,其分量为[p4[0] - p3[0], p4[1] - p3[1]]。
v3表示从p1指向p3的向量,其分量为[p3[0] - p1[0], p3[1] - p1[1]]。
v4表示从p1指向p4的向量,其分量为[p4[0] - p1[0], p4[1] - p1[1]]。
接下来,计算了两个叉积cross1和cross2:
cross1表示v1和v3的叉积,计算公式为v1[0] * v3[1] - v1[1] * v3[0]。
cross2表示v1和v4的叉积,计算公式为v1[0] * v4[1] - v1[1] * v4[0]。
最后,根据两个叉积的乘积进行判断:
如果cross1和cross2的乘积小于等于0,意味着v1和v3位于不同的半平面或者其中一个线段的某个端点在另一个线段上,这时可以判断两条线段相交。
如果cross1和cross2的乘积大于0,意味着v1和v3位于同一侧或者两个线段没有交点,这时可以判断两条线段不相交。
根据以上逻辑,如果条件满足,则返回True表示线段相交,否则返回False表示线段不相交。
Python代码实现:
def are_lines_intersect(p1, p2, p3, p4):
v1 = [p2[0] - p1[0], p2[1] - p1[1]]
v2 = [p4[0] - p3[0], p4[1] - p3[1]]
v3 = [p3[0] - p1[0], p3[1] - p1[1]]
v4 = [p4[0] - p1[0], p4[1] - p1[1]]
cross1 = v1[0] * v3[1] - v1[1] * v3[0]
cross2 = v1[0] * v4[1] - v1[1] * v4[0]
if cross1 * cross2 <= 0:
return True
else:
return False
def compute_intersection(p1, p2, p3, p4):
if p1[0] == p2[0]: # p1p2为垂直线
x = p1[0]
slope2 = (p4[1] - p3[1]) / (p4[0] - p3[0])
intercept2 = p3[1] - slope2 * p3[0]
y = slope2 * x + intercept2
elif p3[0] == p4[0]: # p3p4为垂直线
x = p3[0]
slope1 = (p2[1] - p1[1]) / (p2[0] - p1[0])
intercept1 = p1[1] - slope1 * p1[0]
y = slope1 * x + intercept1
else:
slope1 = (p2[1] - p1[1]) / (p2[0] - p1[0])
slope2 = (p4[1] - p3[1]) / (p4[0] - p3[0])
intercept1 = p1[1] - slope1 * p1[0]
intercept2 = p3[1] - slope2 * p3[0]
x = (intercept2 - intercept1) / (slope1 - slope2)
y = slope1 * x + intercept1
return [x, y]
if __name__ == '__main__':
p1 = [10, 20]
p2 = [0, 100]
p3 = [100, 50]
p4 = [200, 30]
# p1 p2 是一条线段
# p3 p4 是另一条线段
# 判断是否相交,相交且求交点
if are_lines_intersect(p1, p2, p3, p4):
print(compute_intersection(p1, p2, p3, p4))
x, y = compute_intersection(p1, p2, p3, p4)
else:
print("No intersection")
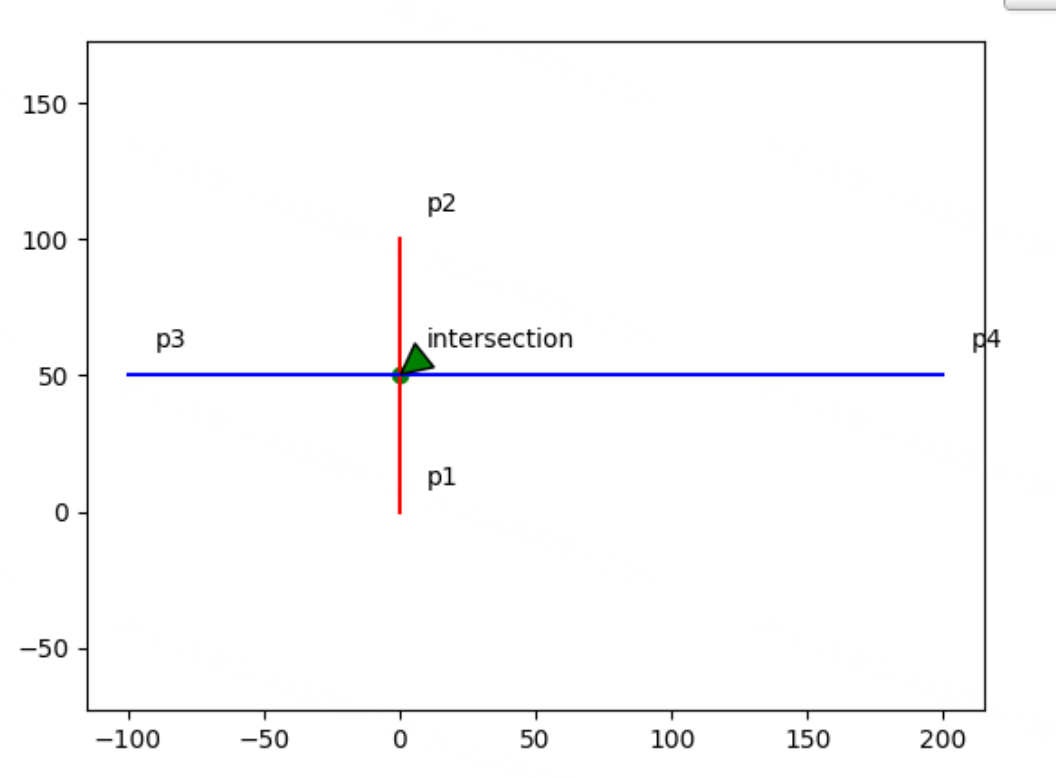
# 画图
import matplotlib.pyplot as plt
plt.plot([p1[0], p2[0]], [p1[1], p2[1]], color='r')
plt.plot([p3[0], p4[0]], [p3[1], p4[1]], color='b')
# 加注释
plt.annotate('p1', xy=(p1[0], p1[1]), xytext=(p1[0] + 10, p1[1] + 10))
plt.annotate('p2', xy=(p2[0], p2[1]), xytext=(p2[0] + 10, p2[1] + 10))
plt.annotate('p3', xy=(p3[0], p3[1]), xytext=(p3[0] + 10, p3[1] + 10))
plt.annotate('p4', xy=(p4[0], p4[1]), xytext=(p4[0] + 10, p4[1] + 10))
try:
# 绘制交点
plt.scatter(x, y, color='g')
# 给交点加注释
plt.annotate('intersection', xy=(x, y), xytext=(x + 10, y + 10),
arrowprops=dict(facecolor='g', shrink=0.05))
except:
pass
# 坐标轴等距
plt.axis('equal')
plt.show()
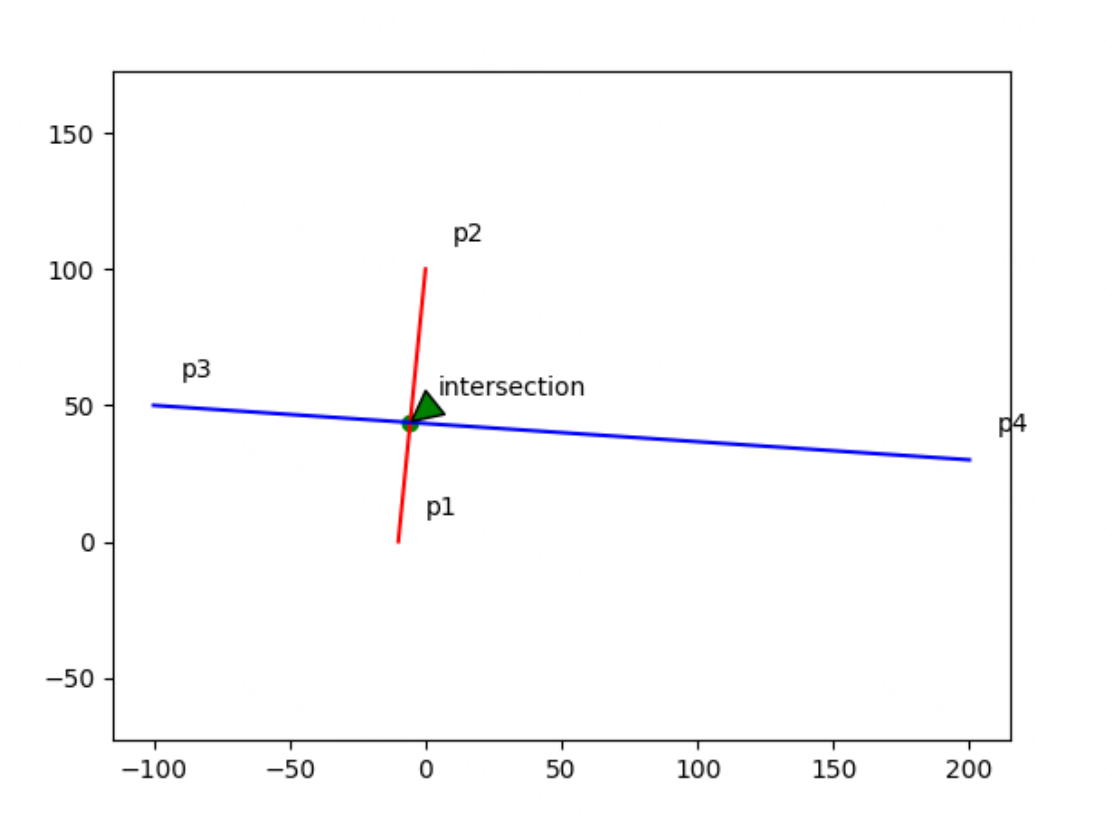
绘制的图:
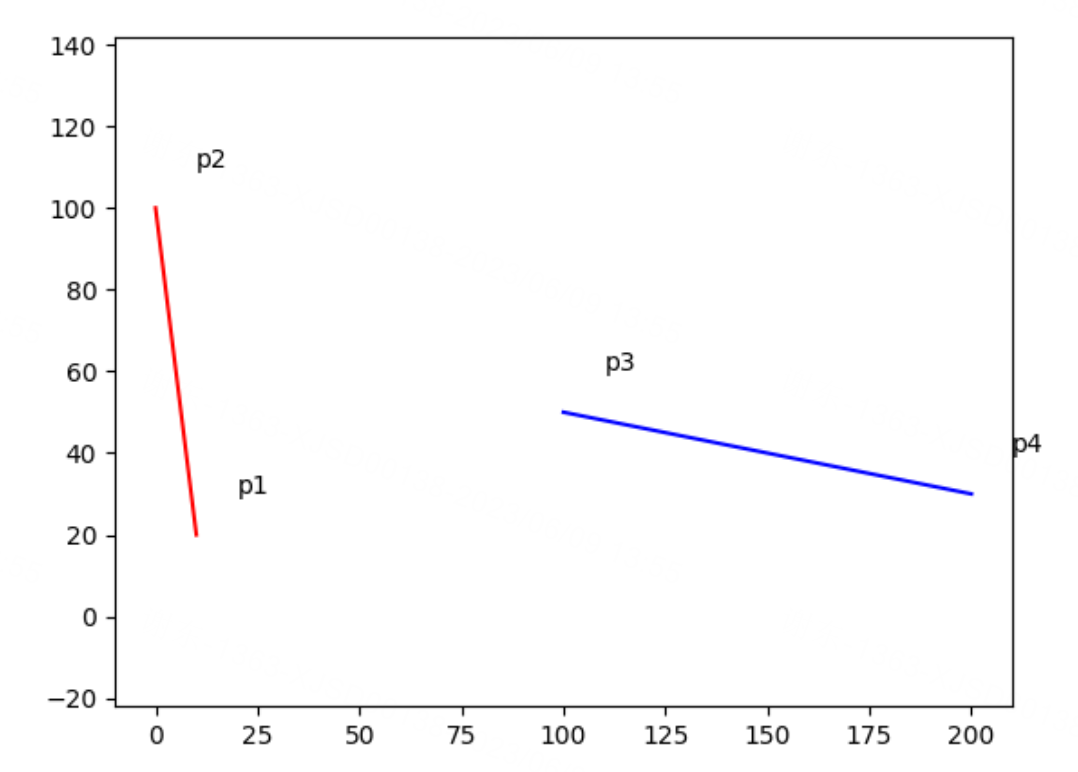
不相交:
C++ 借助opencv的数据结构
// are_lines_intersect: 判断两条线段是否相交
// 原理:判断两条线段的端点是否在另一条线段的两侧
bool are_lines_intersect(cv::Point2f p1, cv::Point2f p2, cv::Point2f p3, cv::Point2f p4) {
cv::Point2f v1 = p2 - p1;
cv::Point2f v2 = p4 - p3;
cv::Point2f v3 = p3 - p1;
cv::Point2f v4 = p4 - p1;
float cross1 = v1.x * v3.y - v1.y * v3.x;
float cross2 = v1.x * v4.y - v1.y * v4.x;
if (cross1 * cross2 <= 0) {
return true;
} else {
return false;
}
}
// compute_intersection: 计算两条线段的交点
// 原理:计算两条线段的斜率和截距,然后解方程
cv::Point2f compute_intersection(cv::Point2f p1, cv::Point2f p2, cv::Point2f p3, cv::Point2f p4) {
cv::Point2f intersection;
if (p1.x == p2.x) {
intersection.x = p1.x;
float slope2 = (p4.y - p3.y) / (p4.x - p3.x);
float intercept2 = p3.y - slope2 * p3.x;
intersection.y = slope2 * intersection.x + intercept2;
} else if (p3.x == p4.x) {
intersection.x = p3.x;
float slope1 = (p2.y - p1.y) / (p2.x - p1.x);
float intercept1 = p1.y - slope1 * p1.x;
intersection.y = slope1 * intersection.x + intercept1;
} else {
float slope1 = (p2.y - p1.y) / (p2.x - p1.x);
float slope2 = (p4.y - p3.y) / (p4.x - p3.x);
float intercept1 = p1.y - slope1 * p1.x;
float intercept2 = p3.y - slope2 * p3.x;
intersection.x = (intercept2 - intercept1) / (slope1 - slope2);
intersection.y = slope1 * intersection.x + intercept1;
}
return intersection;
}
![[前端]JS——join()与split()的使用](https://img-blog.csdnimg.cn/ff8dcc9677444395921ee0eac6dd121e.png)