一、架构与术语解释
BSW中以后每一节我都会放上一张模块图,所以就先上图:
由于汽车上一般都使用CAN总线,图中的bus大家可以就当成CAN来看待,如果使用的是LIN或者其他的,也相应的换成其总线看待就行。后续在实践篇中将会有一节来做communication的实验,但是基础内容大家也都需要掌握理解才行,不然到了后来实验,可能大家都不知道博主在干啥(虽然我后续尽量讲的详细一点吧)。所以BSW中的这些章节可能较为苦涩难懂,但是希望大家能耐着性子先浏览一遍先,在脑子中有个大致的印象,后续实验课再回头来看,就会轻松不少
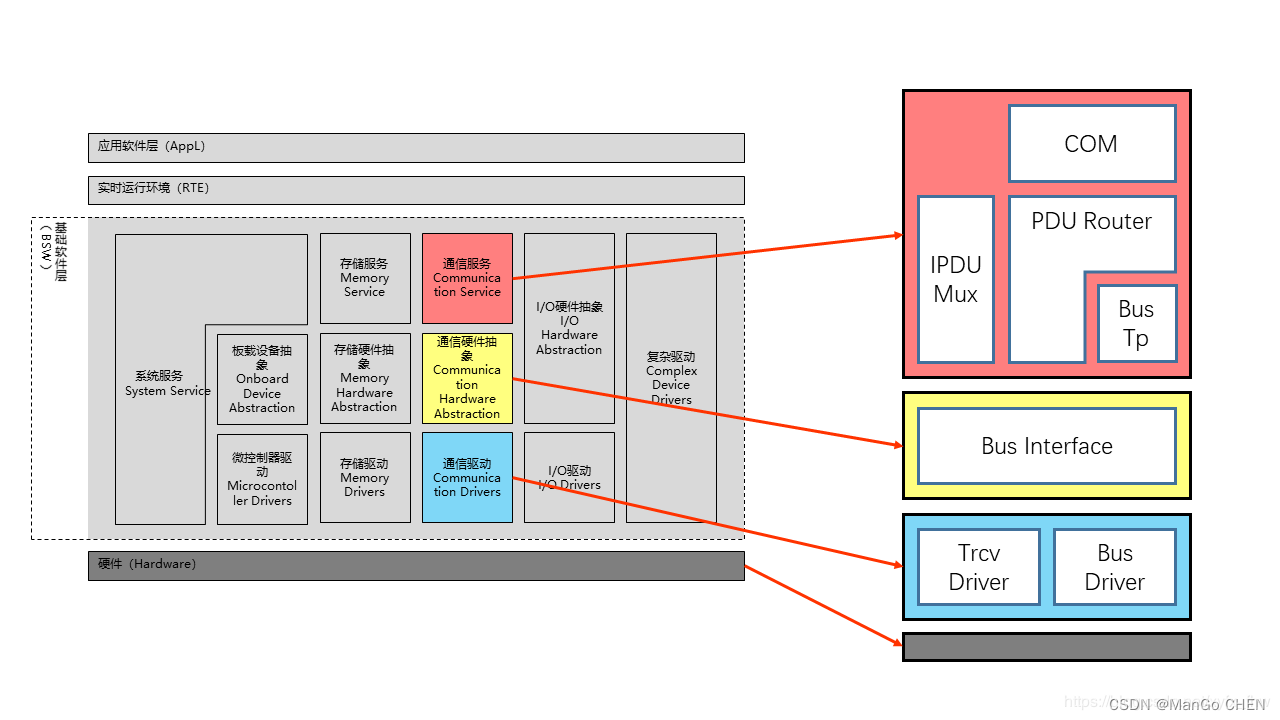
模块详解:
- COM:从应用层传下来数据首先就进入这里,应用层无需关心收发的数据是通过什么总线传输的,应用只需要将它传输给COM即可。这些收发的数据是由用户的DBC文件或者ARXML文件已经定义好了的(这些文件一般OEM整车厂在整车设计的时候就做出来了,里面有总线的网络拓扑图,每个传输的数据应该走什么总线都有定义,所以应用层是无需关心的,只需要优雅的将数据和COM交换即可)。同样,COM上传的数据也是很单纯的数据,里面没有这个数据是什么总线上传的这样无意义的信息,应用层关心的是这个数据的实际意义和数据大小。所以COM主要就起了一个信号接口和网关的作用。
- PDU Router: PDU------Protocol DataUnit,协议数据单元。这个模块的功能就是将COM下发的信号数据分配到相应的协议总线上去;或者将不同的协议变成同一信号上传给COM。
- IPDU Mux: 用于解析一些特殊的协议,比如CANFD或者用户自定义的一些协议。就是起了一个统一CAN ID,不同信号Layout的作用。
- CAN Tp:分包数据传输与错误检测,一般来说只有在诊断的时候才会使用。
- CAN Interface:与硬件已经无关了,与硬件相关的是下面两个Driver做的工作,这个Interface主要可以配置收发队列;组帧(FlexRay);管理时间触发总线的调度表(LIN,FlexRay)。
- CAN Driver: 就是MCAL中对主芯片上CAN模块的驱动封装。
- Trcv Driver:Trcv------Transceiver的缩写,就是收发器驱动的意思。如果是外置CAN收发器,这里就要用到Trcv
- Driver这个驱动,而非CAN Driver。
感觉这么简单的罗列一下上面的术语,可能大家还是看不懂,下面就简单的发送和接收流程做一个解释(CAN这东西太庞大,这里一时也讲不完,就拿最简单的方式来说明一下)
二、发送流程
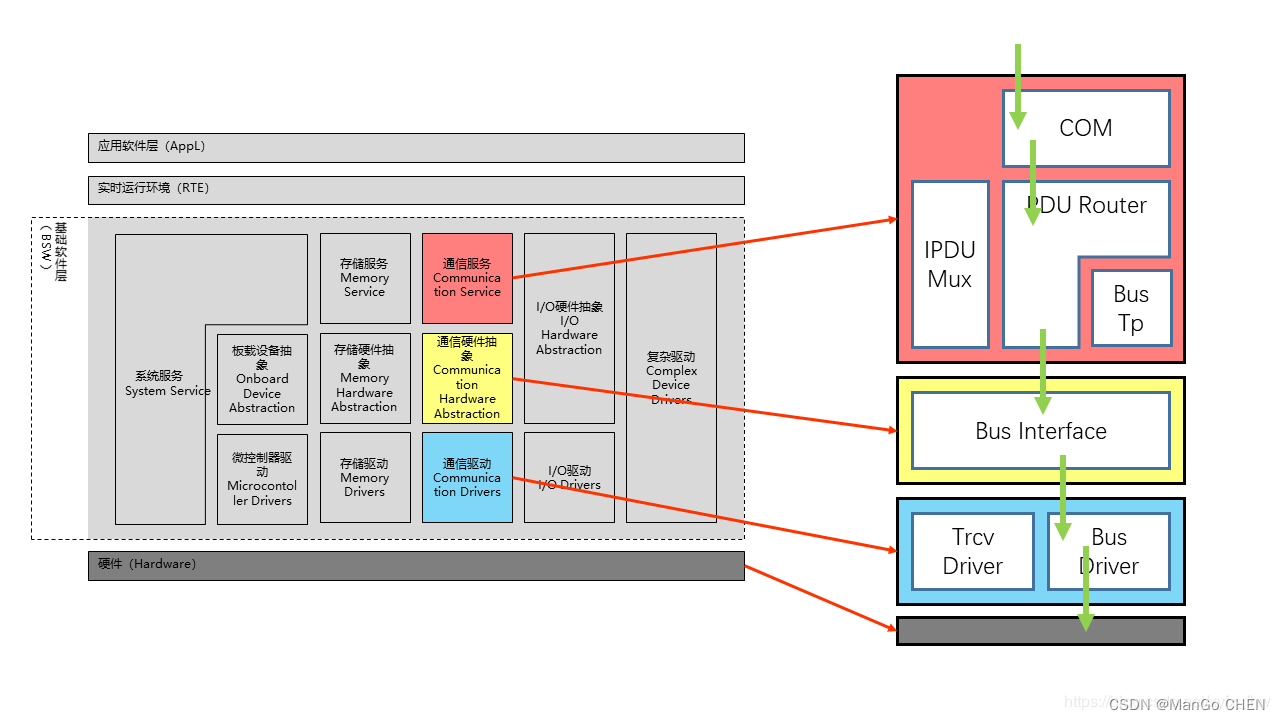
- 1. 应用层Send一个数据进COM
- 2. COM写信号进PDU Buffer中
- 3. PDU被PDU
Router立刻发送或按周期发送(每个PDU都有一个独立的ID),之后PDU
Router辨认总线种类,并把PDU发向不同的下级模块
- 4. Interface根据不同的通道,把报文写入不同的队列
- 5. Driver根据报文的优先级立刻发送报文
三、接收流程
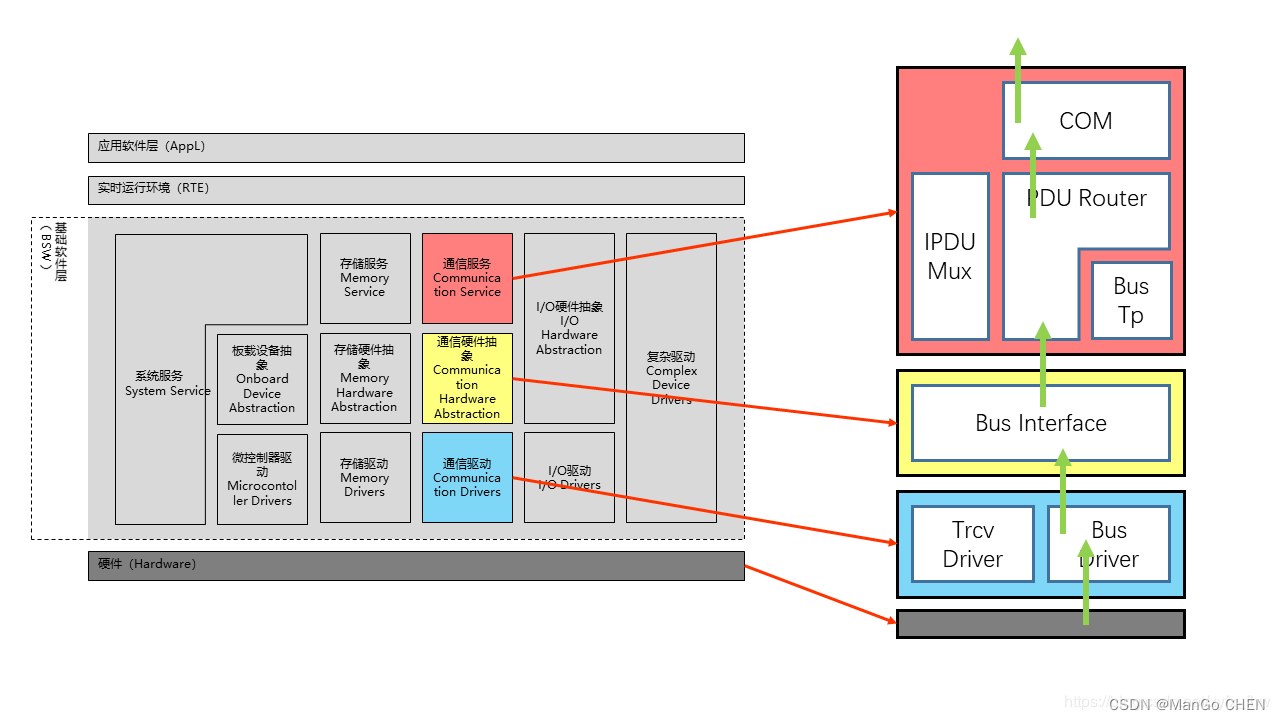
中断或者循环接收(这里假设为中断):
- 1. 硬件接收报文
- 2. 由Driver发出Rx中断(函数),之后通过RxIndication,数据被传递到Interface
- 3. 传递到PDU Router
- 4. 传递到COM(如果SWCs使用Data
- ReceptionTrigger,就通知RTE;否则暂存到Buffer中)
- 5. 信号被RTE读取,然后应用层读取