1、BEVerse: Unified Perception and Prediction in Birds-Eye-View for Vision-Centric Autonomous Driving
本文不想已经存在的单一任务优化方法,而是构建BEV的时空视频特征并联合推断视觉自动驾驶多任务。之前的任务是目标检测和地图语义分割一起做,之后再进行运动预测,本文中三项任务一起进行并可以平衡任务间的性能;
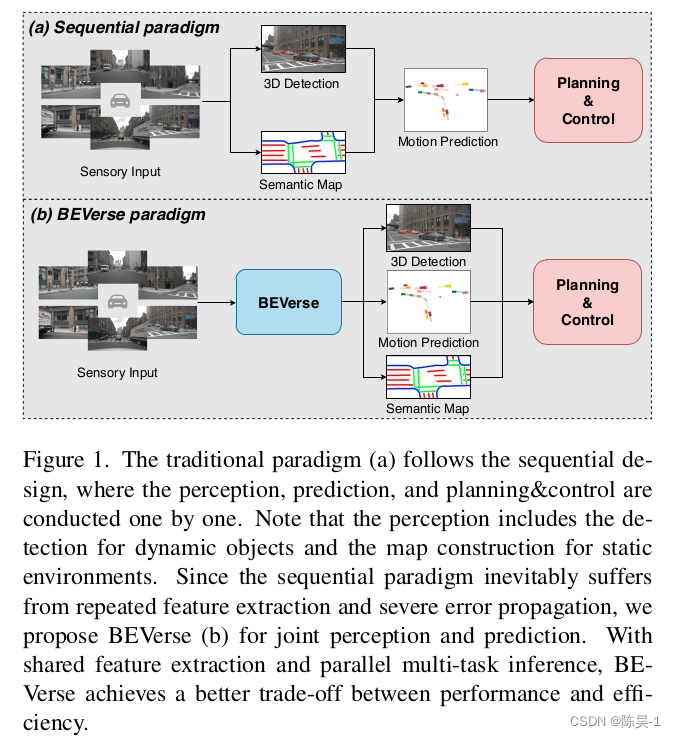
本文与之前任务的差别
1、BEVerse: Unified Perception and Prediction in Birds-Eye-View for Vision-Centric Autonomous Driving
本文不想已经存在的单一任务优化方法,而是构建BEV的时空视频特征并联合推断视觉自动驾驶多任务。之前的任务是目标检测和地图语义分割一起做,之后再进行运动预测,本文中三项任务一起进行并可以平衡任务间的性能;
本文与之前任务的差别
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/707954.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!