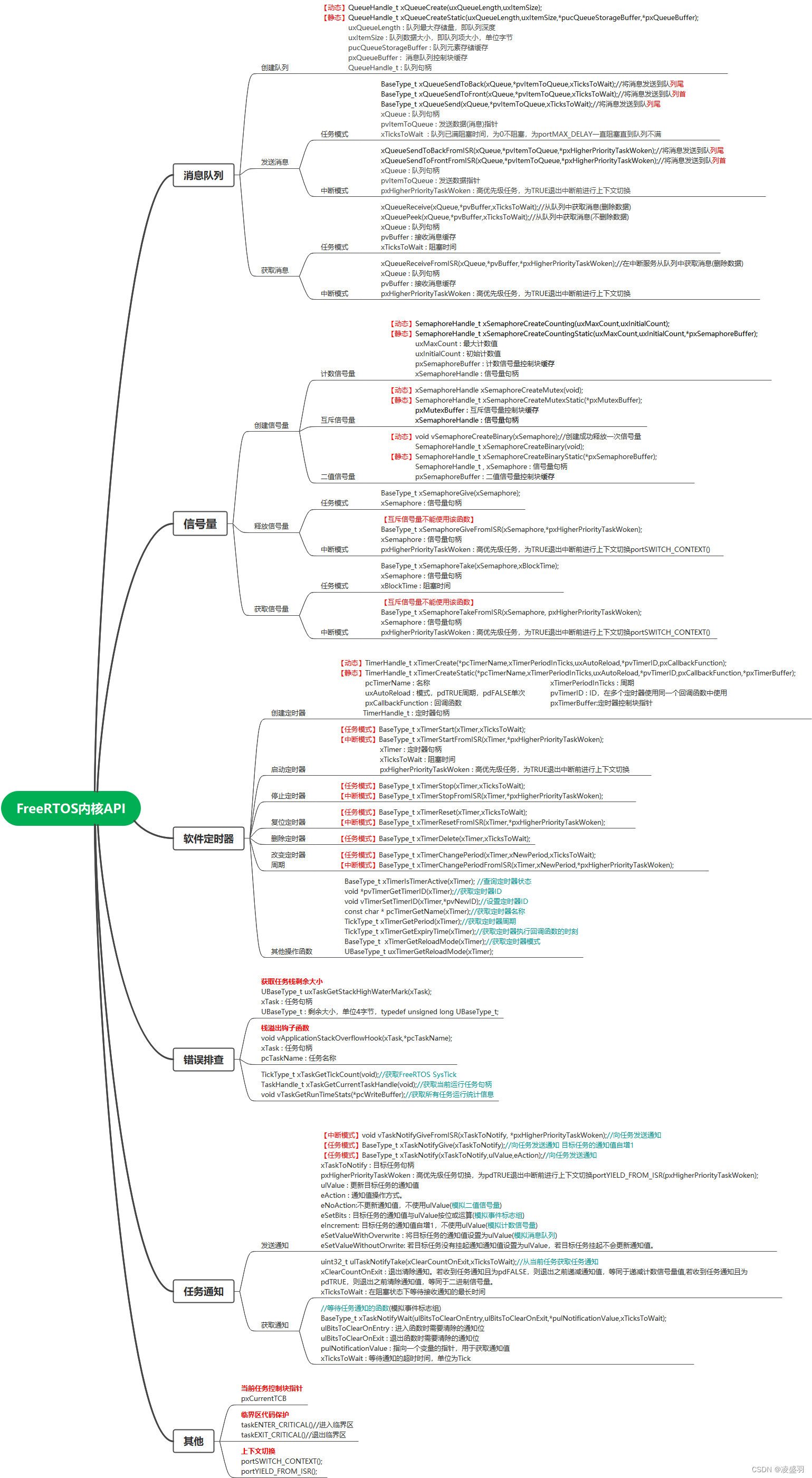
FreeRTOS内核API速览
- 信号量
-
- 消息队列
-
- 软件定时器
- 创建定时器
- 启动定时器
- 停止定时器
- 复位定时器
- 删除定时器
- 改变定时器周期
- 其他操作函数
- 任务通知
-
- 错误排查
- 其他
- 汇总图
信号量
创建信号量
计数信号量
【动态】SemaphoreHandle_t xSemaphoreCreateCounting(uxMaxCount,uxInitialCount);
【静态】SemaphoreHandle_t xSemaphoreCreateCountingStatic(uxMaxCount,uxInitialCount,*pxSemaphoreBuffer);
uxMaxCount : 最大计数值
uxInitialCount : 初始计数值
pxSemaphoreBuffer : 计数信号量控制块缓存
xSemaphoreHandle : 信号量句柄
互斥信号量
【动态】xSemaphoreHandle xSemaphoreCreateMutex(void);
【静态】SemaphoreHandle_t xSemaphoreCreateMutexStatic(*pxMutexBuffer);
pxMutexBuffer : 互斥信号量控制块缓存
xSemaphoreHandle : 信号量句柄
二值信号量
【动态】void vSemaphoreCreateBinary(xSemaphore);
SemaphoreHandle_t xSemaphoreCreateBinary(void);
【静态】SemaphoreHandle_t xSemaphoreCreateBinaryStatic(*pxSemaphoreBuffer);
SemaphoreHandle_t xSemaphore : 信号量句柄
pxSemaphoreBuffer : 二值信号量控制块缓存
释放信号量
任务模式
BaseType_t xSemaphoreGive(xSemaphore);
xSemaphore : 信号量句柄
中断模式
【互斥信号量不能使用该函数】
BaseType_t xSemaphoreGiveFromISR(xSemaphore,*pxHigherPriorityTaskWoken);
xSemaphore : 信号量句柄
pxHigherPriorityTaskWoken : 高优先级任务,为TRUE退出中断前进行上下文切换portSWITCH_CONTEXT()
获取信号量
任务模式
BaseType_t xSemaphoreTake(xSemaphore,xBlockTime);
xSemaphore : 信号量句柄
xBlockTime : 阻塞时间
中断模式
【互斥信号量不能使用该函数】
BaseType_t xSemaphoreTakeFromISR(xSemaphore, pxHigherPriorityTaskWoken);
xSemaphore : 信号量句柄
pxHigherPriorityTaskWoken : 高优先级任务,为TRUE退出中断前进行上下文切换portSWITCH_CONTEXT()
消息队列
创建队列
【动态】QueueHandle_t xQueueCreate(uxQueueLength,uxItemSize);
【静态】QueueHandle_t xQueueCreateStatic(uxQueueLength,uxItemSize,*pucQueueStorageBuffer,*pxQueueBuffer);
uxQueueLength : 队列最大存储量,即队列深度
uxItemSize : 队列数据大小,即队列项大小,单位字节
pucQueueStorageBuffer : 队列元素存储缓存
pxQueueBuffer : 消息队列控制块缓存
QueueHandle_t : 队列句柄
发送消息
任务模式
BaseType_t xQueueSendToBack(xQueue,*pvItemToQueue,xTicksToWait);
BaseType_t xQueueSendToFront(xQueue,*pvItemToQueue,xTicksToWait);
BaseType_t xQueueSend(xQueue,*pvItemToQueue,xTicksToWait);
xQueue : 队列句柄
pvItemToQueue : 发送数据(消息)指针
xTicksToWait : 队列已满阻塞时间,为0不阻塞,为portMAX_DELAY一直阻塞直到队列不满
中断模式
xQueueSendToBackFromISR(xQueue,*pvItemToQueue,*pxHigherPriorityTaskWoken);
xQueueSendToFrontFromISR(xQueue,*pvItemToQueue,*pxHigherPriorityTaskWoken);
xQueue : 队列句柄
pvItemToQueue : 发送数据指针
pxHigherPriorityTaskWoken : 高优先级任务,为TRUE退出中断前进行上下文切换
获取消息
任务模式
xQueueReceive(xQueue,*pvBuffer,xTicksToWait);
xQueuePeek(xQueue,*pvBuffer,xTicksToWait);
xQueue : 队列句柄
pvBuffer : 接收消息缓存
xTicksToWait : 阻塞时间
中断模式
xQueueReceiveFromISR(xQueue,*pvBuffer,*pxHigherPriorityTaskWoken);
xQueue : 队列句柄
pvBuffer : 接收消息缓存
pxHigherPriorityTaskWoken : 高优先级任务,为TRUE退出中断前进行上下文切换
软件定时器
创建定时器
【动态】TimerHandle_t xTimerCreate(*pcTimerName,xTimerPeriodInTicks,uxAutoReload,*pvTimerID,pxCallbackFunction);
【静态】TimerHandle_t xTimerCreateStatic(*pcTimerName,xTimerPeriodInTicks,uxAutoReload,*pvTimerID,pxCallbackFunction,*pxTimerBuffer);
pcTimerName : 名称
xTimerPeriodInTicks : 周期
uxAutoReload : 模式,pdTRUE周期,pdFALSE单次
pvTimerID : ID,在多个定时器使用同一个回调函数中使用
pxCallbackFunction : 回调函数
pxTimerBuffer : 定时器控制块指针
TimerHandle_t : 定时器句柄
启动定时器
【任务模式】BaseType_t xTimerStart(xTimer,xTicksToWait);
【中断模式】BaseType_t xTimerStartFromISR(xTimer,*pxHigherPriorityTaskWoken);
xTimer : 定时器句柄
xTicksToWait : 阻塞时间
pxHigherPriorityTaskWoken : 高优先级任务,为TRUE退出中断前进行上下文切换
停止定时器
【任务模式】BaseType_t xTimerStop(xTimer,xTicksToWait);
【中断模式】BaseType_t xTimerStopFromISR(xTimer,*pxHigherPriorityTaskWoken);
xTimer : 定时器句柄
xTicksToWait : 阻塞时间
pxHigherPriorityTaskWoken : 高优先级任务,为TRUE退出中断前进行上下文切换
复位定时器
【任务模式】BaseType_t xTimerReset(xTimer,xTicksToWait);
【中断模式】BaseType_t xTimerResetFromISR(xTimer,*pxHigherPriorityTaskWoken);
xTimer : 定时器句柄
xTicksToWait : 阻塞时间
pxHigherPriorityTaskWoken : 高优先级任务,为TRUE退出中断前进行上下文切换
删除定时器
【任务模式】BaseType_t xTimerDelete(xTimer,xTicksToWait);
xTimer : 定时器句柄
xTicksToWait : 阻塞时间
改变定时器周期
【任务模式】BaseType_t xTimerChangePeriod(xTimer,xNewPeriod,xTicksToWait);
【中断模式】BaseType_t xTimerChangePeriodFromISR(xTimer,xNewPeriod,*pxHigherPriorityTaskWoken);
xTimer : 定时器句柄
xTicksToWait : 阻塞时间
pxHigherPriorityTaskWoken : 高优先级任务,为TRUE退出中断前进行上下文切换
其他操作函数
BaseType_t xTimerIsTimerActive(xTimer);
void *pvTimerGetTimerID(xTimer);
void vTimerSetTimerID(xTimer,*pvNewID);
const char * pcTimerGetName(xTimer);
TickType_t xTimerGetPeriod(xTimer);
TickType_t xTimerGetExpiryTime(xTimer);
BaseType_t xTimerGetReloadMode(xTimer);
UBaseType_t uxTimerGetReloadMode(xTimer);
任务通知
发送通知
任务模式
【任务模式】BaseType_t xTaskNotifyGive(xTaskToNotify);
【任务模式】BaseType_t xTaskNotify(xTaskToNotify,ulValue,eAction);
xTaskToNotify : 目标任务句柄
ulValue : 更新目标任务的通知值
eAction : 通知值操作方式。
eNoAction :不更新通知值,不使用ulValue(模拟二值信号量)
eSetBits : 目标任务的通知值与ulValue按位或运算(模拟事件标志组)
eIncrement : 目标任务的通知值自增1,不使用ulValue(模拟计数信号量)
eSetValueWithOverwrite : 将目标任务的通知值设置为ulValue(模拟消息队列)
eSetValueWithoutOrwrite : 若目标任务没有挂起通知通知值设置为ulValue,若目标任务挂起不会更新通知值。
中断模式
【中断模式】void vTaskNotifyGiveFromISR(xTaskToNotify, *pxHigherPriorityTaskWoken);
xTaskToNotify : 目标任务句柄
pxHigherPriorityTaskWoken : 高优先级任务切换,为pdTRUE退出中断前进行上下文切换portYIELD_FROM_ISR(pxHigherPriorityTaskWoken);
获取通知
uint32_t ulTaskNotifyTake(xClearCountOnExit,xTicksToWait);
xClearCountOnExit : 退出清除通知。若收到任务通知且为pdFALSE,则退出之前递减通知值,等同于递减计数信号量值,若收到任务通知且为pdTRUE,则退出之前清除通知值,等同于二进制信号量。
xTicksToWait : 在阻塞状态下等待接收通知的最长时间
BaseType_t xTaskNotifyWait(ulBitsToClearOnEntry,ulBitsToClearOnExit,*pulNotificationValue,xTicksToWait);
ulBitsToClearOnEntry : 进入函数时需要清除的通知位
ulBitsToClearOnExit : 退出函数时需要清除的通知位
pulNotificationValue : 指向一个变量的指针,用于获取通知值
xTicksToWait : 等待通知的超时时间,单位为Tick
错误排查
获取任务栈剩余大小
UBaseType_t uxTaskGetStackHighWaterMark(xTask);
xTask : 任务句柄
UBaseType_t : 剩余大小,单位4字节,typedef unsigned long UBaseType_t;
栈溢出钩子函数
void vApplicationStackOverflowHook(xTask,*pcTaskName);
xTask : 任务句柄
pcTaskName : 任务名称
TickType_t xTaskGetTickCount(void);
TaskHandle_t xTaskGetCurrentTaskHandle(void);
void vTaskGetRunTimeStats(*pcWriteBuffer);
其他
当前任务控制块指针
pxCurrentTCB
临界区代码保护
taskENTER_CRITICAL()
taskEXIT_CRITICAL()
上下文切换
portSWITCH_CONTEXT();
portYIELD_FROM_ISR();
汇总图